
机械臂回转设备.pdf

努力****爱敏


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机械臂回转设备.pdf
本发明涉及一种机械臂回转设备,该设备由回转驱动部分、法兰连接部分及壳体部分连接组成;所述回转驱动部分包括伺服电机、减速机、连接套、隔套、止动垫及平键;所述法兰连接部分包括过渡法兰及螺栓;所述壳体部分包括壳体及壳体端盖;所述回转驱动部分整体通过螺栓与壳体部分连接。该设备采用伺服电机与减速机直联,减速机输出轴与机械臂或另一回转关节直联,形成多关节直联设备。其结构简单,性能可靠,可在组装时按用户需求与其它关节或机械臂实现模块式组合。由于不采用传统的机械臂回转设备使用的齿轮、齿形带等部件,有效避免了设备长时间重复

机械臂回转底座.pdf
本发明机械臂回转底座,由底座壳、转盘、滚动轴承、大齿轮、小齿轮、步进电机和控制模块组成,回转心轴通过滚动轴承安装到底座壳上,与转盘相连接,步进电机固定在底座壳的内部,小齿轮安装在步进电机的转轴上,大齿轮安装在回转心轴下端,控制模块安装在底座壳内侧上。把机械手控制的相关模块安装到底座壳的内侧,能有效的缩短连接机械手臂与底座的控制信号线和电源线,便于机械手的移动,并且外观紧凑。回转心轴做成空心轴,便于将手臂上的信号线及电源线穿过以连接到底座内部,避免了导电环的使用,提高了可靠性。

作业机械的臂架回转控制方法、装置及作业机械.pdf
本发明提供一种作业机械的臂架回转控制方法、装置及作业机械,所述方法包括获取臂架的第一节臂相对于水平面的倾角,以及各个支腿的位置参数;根据所述位置参数,确定所述支腿的支撑状态;在所述支腿不处于全支撑状态的情况下,根据所述倾角与所述位置参数,确定所述臂架的回转区域,控制所述臂架在所述回转区域内转动。本发明可实现基于支腿与臂架的姿态,便捷地控制臂架安全回转,不仅控制简单便捷,可靠性高,而且操作手可以在安全可控范围内获得更大支撑灵活度,扩大施工范围。

一种回转机械臂关节模块.pdf
一种回转机械臂关节模块,是用于搭建机械臂回转运动及定位的结构模块,它包括框架及与框架中部转动连接的具有轴孔的阶梯轴,还有外壳与框架固定连接的封闭的一体式驱动器,其外壳内安装有同轴行星齿轮减速器、直流无刷电机和霍尔传感器;所述同轴行星齿轮减速器的输出轴连接一个小锥齿轮,输入轴与直流无刷电机传动轴连接;小锥齿轮与安装在阶梯轴上的大锥齿轮啮合构成锥齿轮传动副。本发明的优点是以紧凑的结构实现机械臂的回转运动,从而达到机械臂回转角度的精确测量及定位。
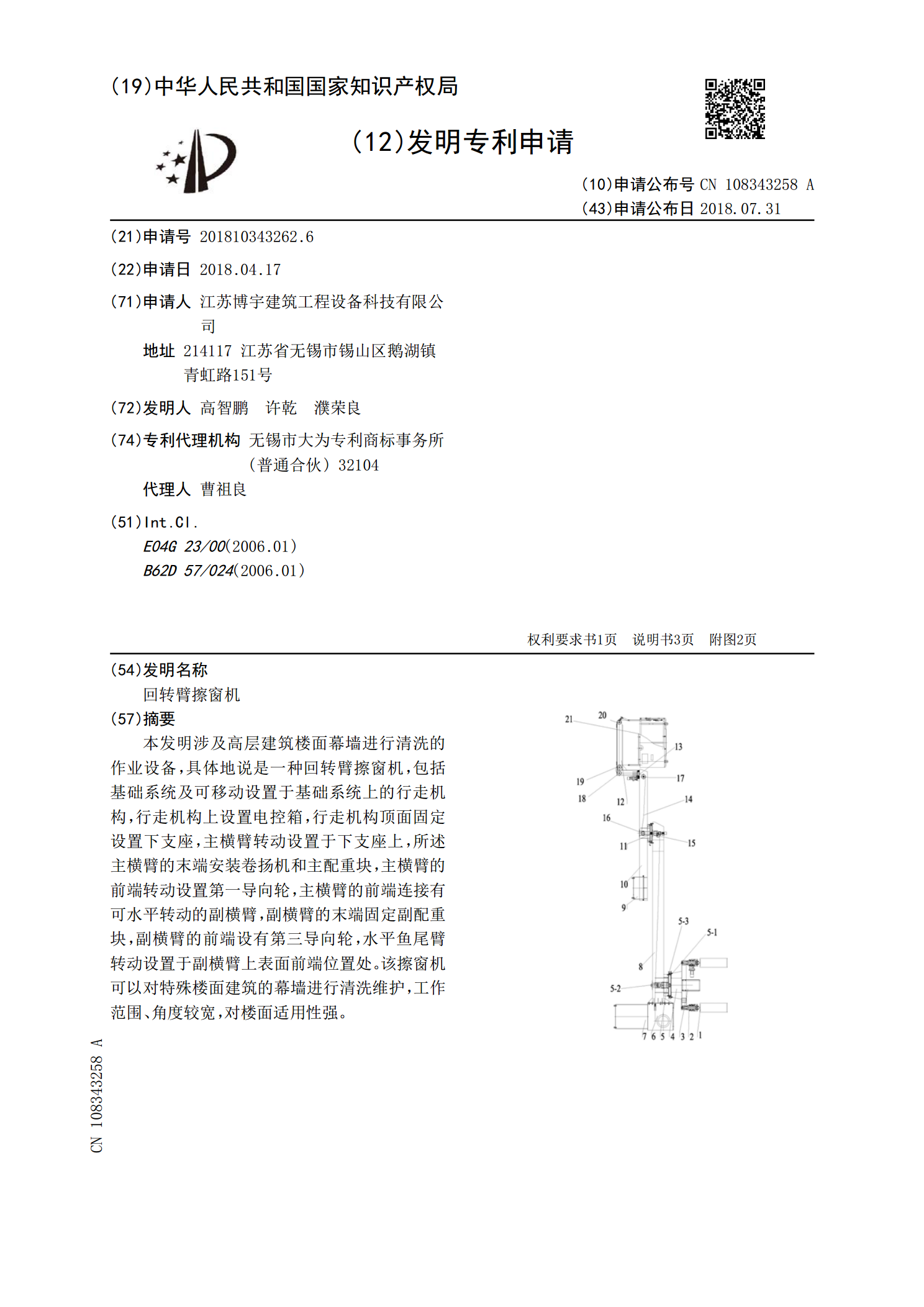
回转臂擦窗机.pdf
本发明涉及高层建筑楼面幕墙进行清洗的作业设备,具体地说是一种回转臂擦窗机,包括基础系统及可移动设置于基础系统上的行走机构,行走机构上设置电控箱,行走机构顶面固定设置下支座,主横臂转动设置于下支座上,所述主横臂的末端安装卷扬机和主配重块,主横臂的前端转动设置第一导向轮,主横臂的前端连接有可水平转动的副横臂,副横臂的末端固定副配重块,副横臂的前端设有第三导向轮,水平鱼尾臂转动设置于副横臂上表面前端位置处。该擦窗机可以对特殊楼面建筑的幕墙进行清洗维护,工作范围、角度较宽,对楼面适用性强。