
小型轮履变结构移动机器人设计及越障分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

小型轮履变结构移动机器人设计及越障分析.docx
小型轮履变结构移动机器人设计及越障分析小型轮履变结构移动机器人设计及越障分析摘要:本文设计了一种小型轮履变结构移动机器人,并且进行了越障分析。该机器人采用轮履变结构,可以实现更灵活的机动性,适应更复杂的环境。文中首先介绍了机器人的总体结构,包括底盘、轮履、传动系统、控制系统等模块。然后详细介绍了机器人的越障分析方法,包括传感器检测、障碍判断、路径规划等步骤。最后,对机器人进行了实验,验证了设计的有效性和越障分析算法的可行性。关键词:小型轮履变结构移动机器人,越障分析,路径规划,传感器检测一、引言移动机器人

小型轮/履变结构移动搜索侦察机器人.pdf
本发明为小型轮/履变结构移动搜索侦察机器人。主要由箱体、行走轮、电动机以及装有轮式与履带式移动相互转换的变换机构、弹性履带、行走装置、侦察装置、移动驱动机构、自锁机构与机器人箱体,机器人箱体后部装有万向轮,机器人箱体和侦察装置通过转动轴连接在一起,构成机器人。该机器人兼有轮式移动机器人快速移动和履带式移动机器人良好越障能力的特点,即在地面条件较好时,采用轮式运动,具有快速移动的性能;在地面条件状况较差时,如遇到障碍物,楼梯台阶或非硬质路面时,通过改变运动机构的运动形式,使其变为有良好的越障能力的

一种轮履变结构移动机器人的行走机构.pdf
本发明属于移动机器人技术领域,特别涉及一种移动机器人的行走机构。一种轮履变结构移动机器人的行走机构,它包括:可伸缩履带、轮履变换装置以及外轮变换装置;在平坦路面上行走时,移动机器人通过外轮变换装置,将外轮撑开,此时可伸缩履带脱离地面,外轮与地面接触;在崎岖路面行走时,移动机器人通过外轮变换装置,将外轮收缩,与地面脱离接触,可伸缩履带与地面接触;爬楼时,移动机器人通过外轮变换装置,将外轮收缩,与地面脱离接触,可伸缩履带与地面接触,并通过轮履变换装置将可伸缩履带自然撑开。本发明适应不同的路况,减少电机的功耗,

一种用于轮履变结构移动机器人的四连杆轮履变换机构.pdf
本发明提供一种用于轮履变结构移动机器人的四连杆轮履变换机构,包括两套相同的四连杆机构、两套小脚轮组件、蜗轮蜗杆电机、齿轮传动和驱动轴,每套四连杆机构驱动一套小脚轮组件。由于两套四连杆机构完全相同,设计时,只需设计出其中一套四连杆机构结构,然后再确定两套四连杆机构中原动杆之间的夹角,极大简化了四连杆式轮履变换机构的设计过程。同时本发明小脚轮组件中的两个小脚轮能够伸缩,可以灵活地调整小脚轮与履带的接触点位置,从而可适用于多种不同形式的履带,或随着履带的周边磨损及时调整接触点的位置。
越障轮及移动机器人.pdf
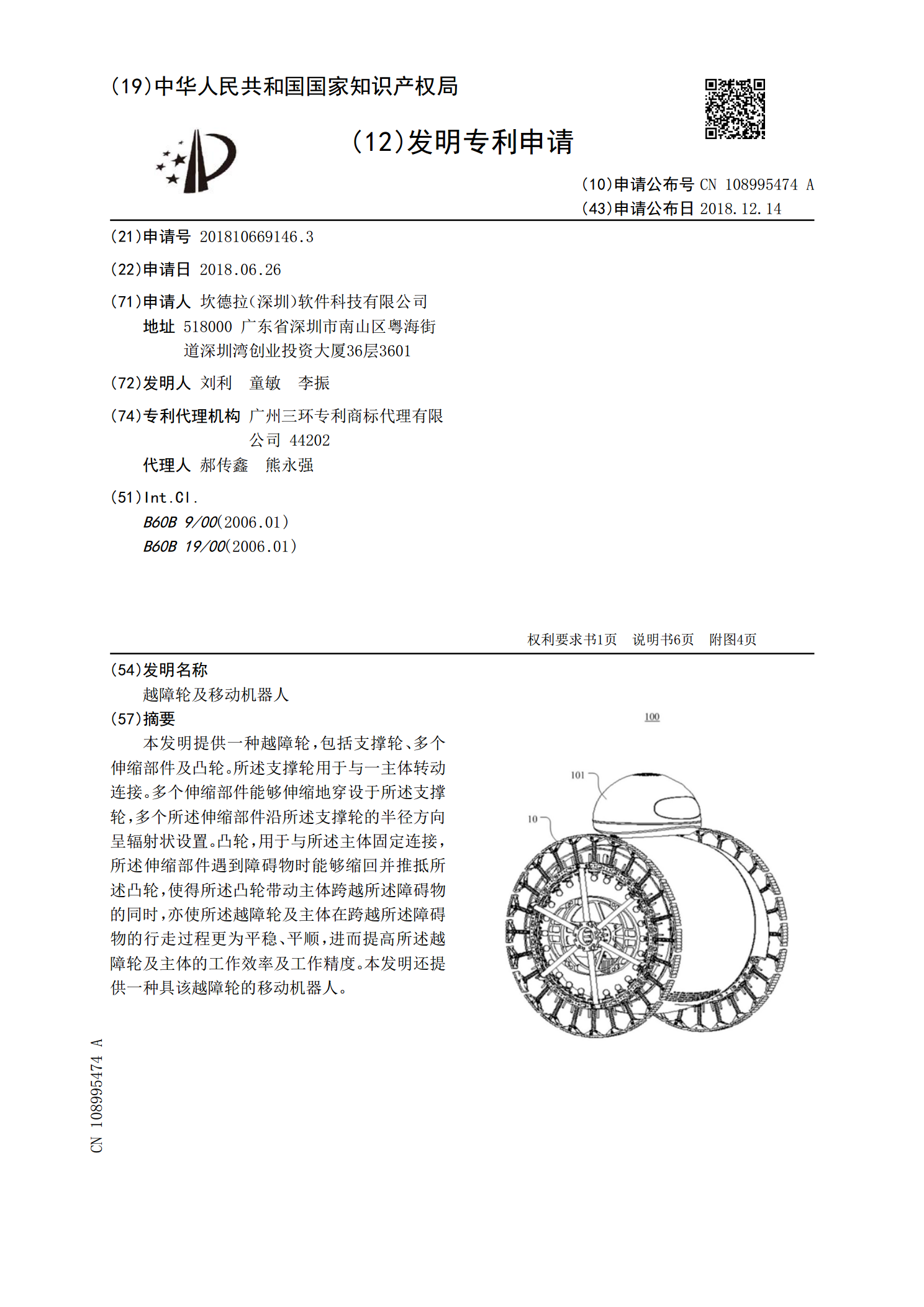
本发明提供一种越障轮,包括支撑轮、多个伸缩部件及凸轮。所述支撑轮用于与一主体转动连接。多个伸缩部件能够伸缩地穿设于所述支撑轮,多个所述伸缩部件沿所述支撑轮的半径方向呈辐射状设置。凸轮,用于与所述主体固定连接,所述伸缩部件遇到障碍物时能够缩回并推抵所述凸轮,使得所述凸轮带动主体跨越所述障碍物的同时,亦使所述越障轮及主体在跨越所述障碍物的行走过程更为平稳、平顺,进而提高所述越障轮及主体的工作效率及工作精度。本发明还提供一种具该越障轮的移动机器人。