
一种独立驱动的全轮转向电动化无人车辆底盘.pdf

瀚玥****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种独立驱动的全轮转向电动化无人车辆底盘.pdf
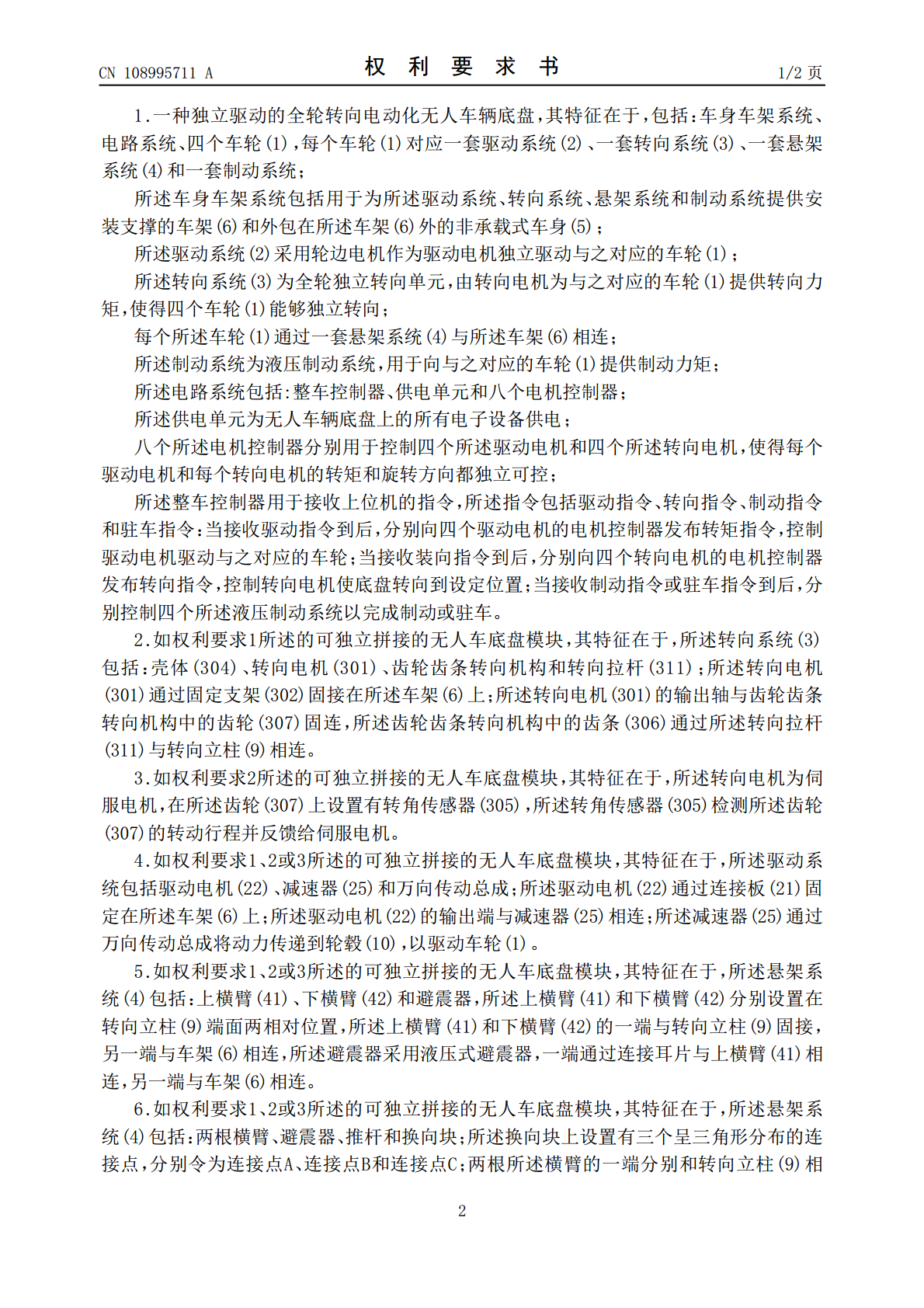
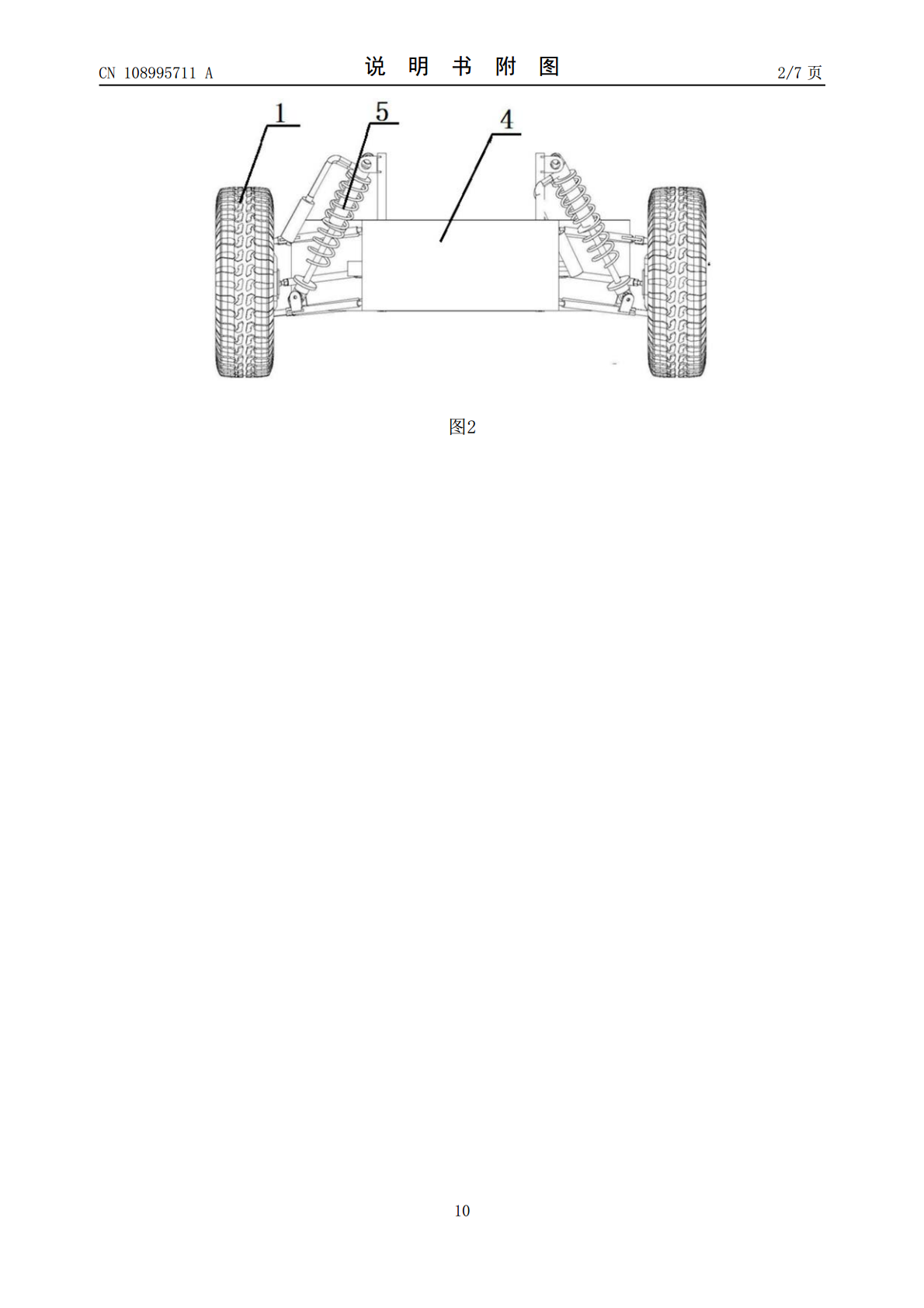
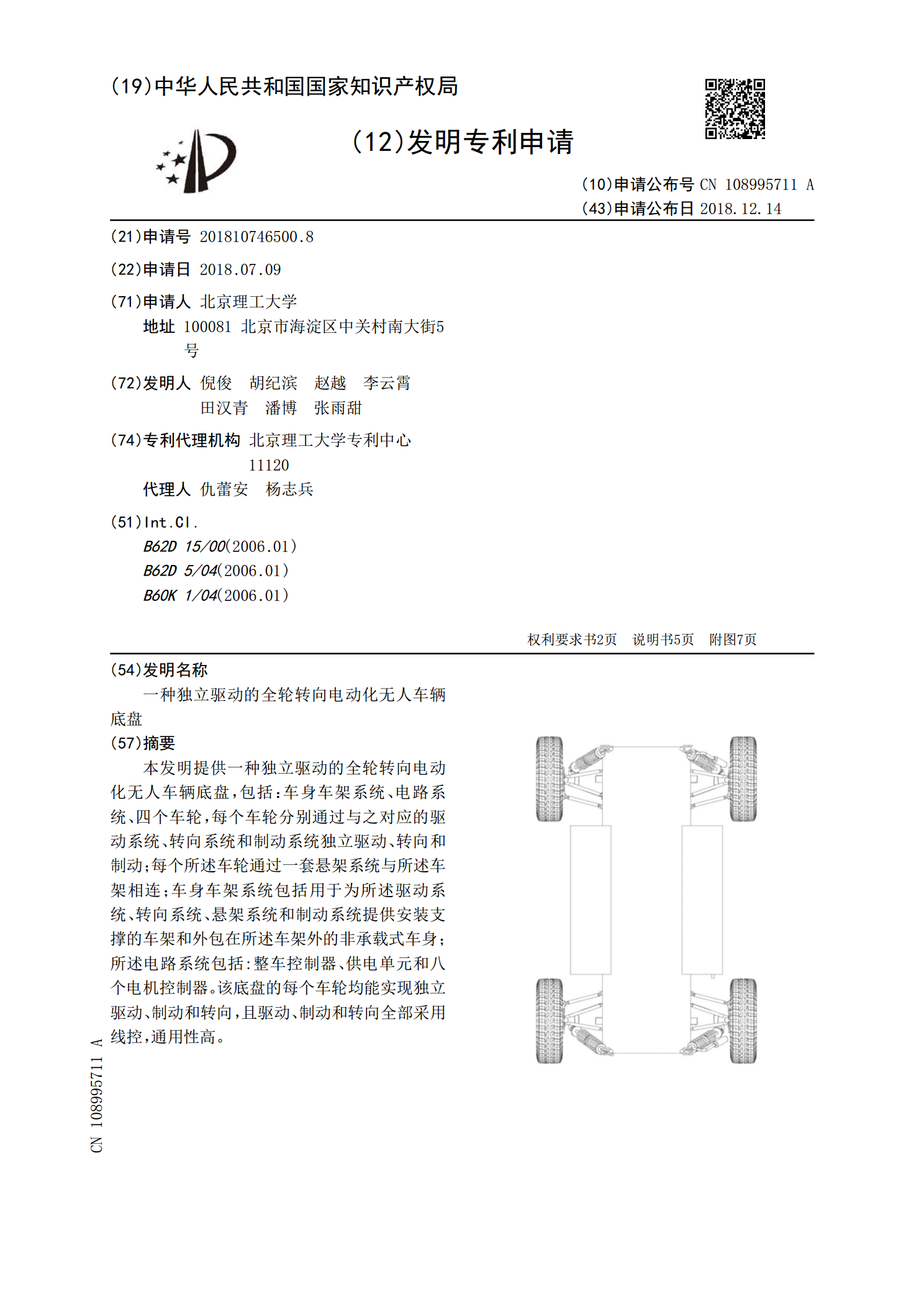
本发明提供一种独立驱动的全轮转向电动化无人车辆底盘,包括:车身车架系统、电路系统、四个车轮,每个车轮分别通过与之对应的驱动系统、转向系统和制动系统独立驱动、转向和制动;每个所述车轮通过一套悬架系统与所述车架相连;车身车架系统包括用于为所述驱动系统、转向系统、悬架系统和制动系统提供安装支撑的车架和外包在所述车架外的非承载式车身;所述电路系统包括:整车控制器、供电单元和八个电机控制器。该底盘的每个车轮均能实现独立驱动、制动和转向,且驱动、制动和转向全部采用线控,通用性高。

一种四轮独立驱动电动车辆的主动转向控制方法.pdf
本发明公开一种四轮独立驱动电动车辆的主动转向控制方法,包括以下步骤:预设理想车辆转向模型、状态反馈观测器、前轮转向角控制器和横摆力矩控制器;以车辆直行状态作为初始时刻,实时测量横向速度和横摆角速度,将未知前轮转向角和横摆力矩输入理想车辆转向模型,构造期望的数学模型,将横向速度和横摆角速度期望值与实时值比较,得到实时误差;将实时误差输入到状态观测器,得到稳定闭环系统,通过解线性矩阵不等式方法,既得到实时车辆横向速度和横摆角速度值,也得到实时前轮转向角和横摆力矩值,从而对车辆进行控制。该方法克服了电动车稳定性
四轮独立驱动独立转向底盘总成结构及控制方法.pdf
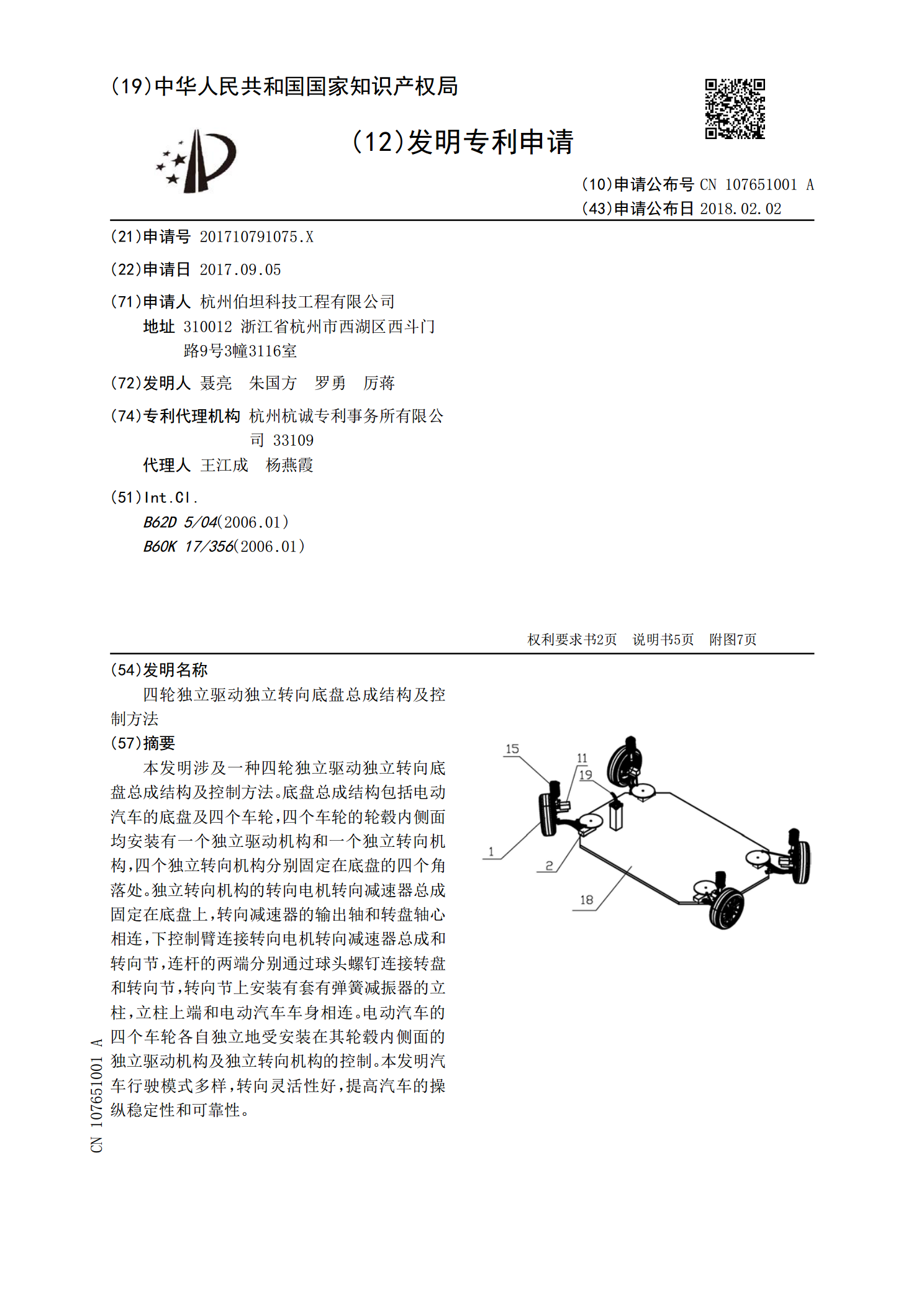
本发明涉及一种四轮独立驱动独立转向底盘总成结构及控制方法。底盘总成结构包括电动汽车的底盘及四个车轮,四个车轮的轮毂内侧面均安装有一个独立驱动机构和一个独立转向机构,四个独立转向机构分别固定在底盘的四个角落处。独立转向机构的转向电机转向减速器总成固定在底盘上,转向减速器的输出轴和转盘轴心相连,下控制臂连接转向电机转向减速器总成和转向节,连杆的两端分别通过球头螺钉连接转盘和转向节,转向节上安装有套有弹簧减振器的立柱,立柱上端和电动汽车车身相连。电动汽车的四个车轮各自独立地受安装在其轮毂内侧面的独立驱动机构及独
一种无人车辆独立转向装置.pdf
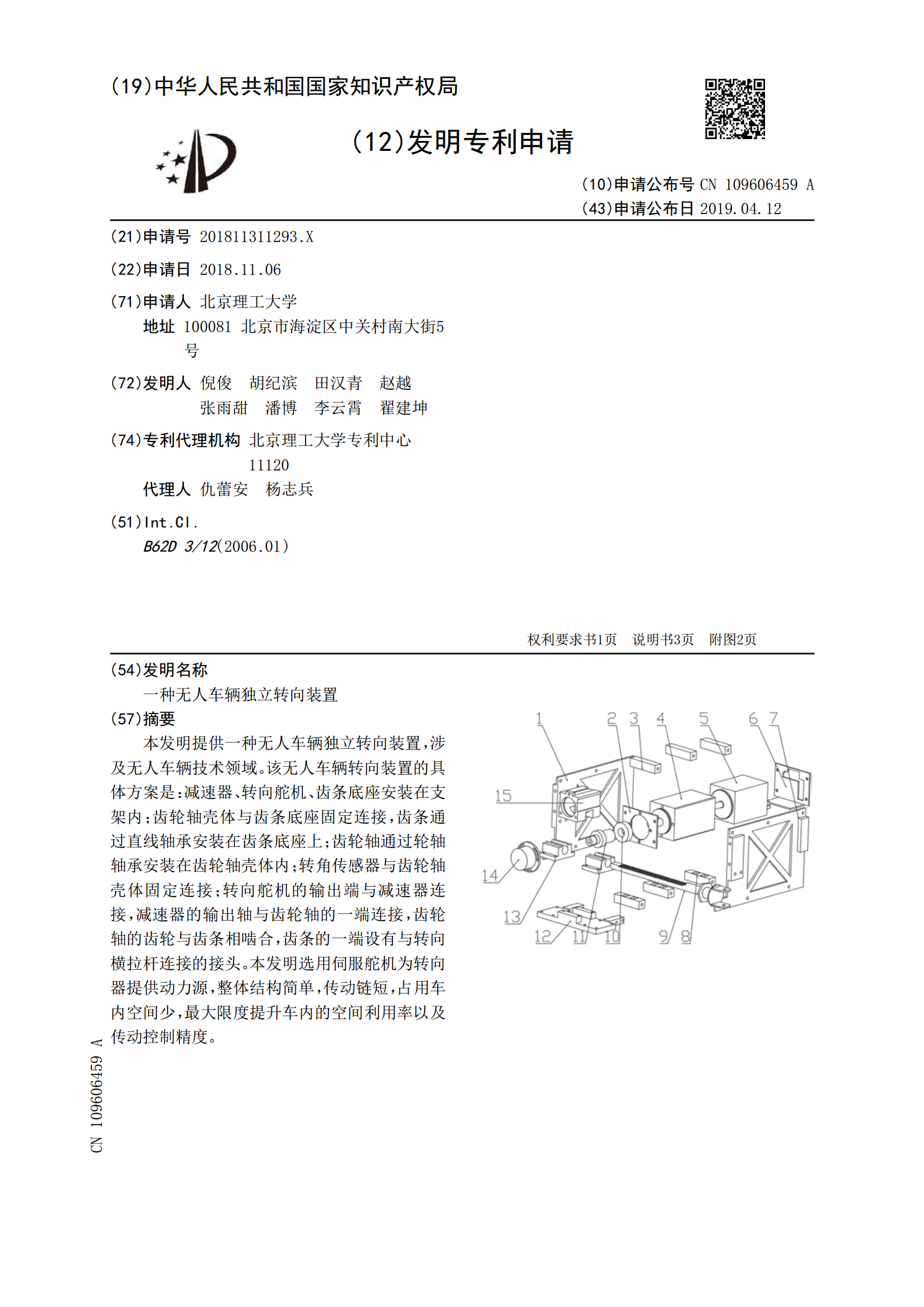
本发明提供一种无人车辆独立转向装置,涉及无人车辆技术领域。该无人车辆转向装置的具体方案是:减速器、转向舵机、齿条底座安装在支架内;齿轮轴壳体与齿条底座固定连接,齿条通过直线轴承安装在齿条底座上;齿轮轴通过轮轴轴承安装在齿轮轴壳体内;转角传感器与齿轮轴壳体固定连接;转向舵机的输出端与减速器连接,减速器的输出轴与齿轮轴的一端连接,齿轮轴的齿轮与齿条相啮合,齿条的一端设有与转向横拉杆连接的接头。本发明选用伺服舵机为转向器提供动力源,整体结构简单,传动链短,占用车内空间少,最大限度提升车内的空间利用率以及传动控制
一种四轮独立驱动无人驾驶电动车辆轨迹跟踪控制方法.pdf
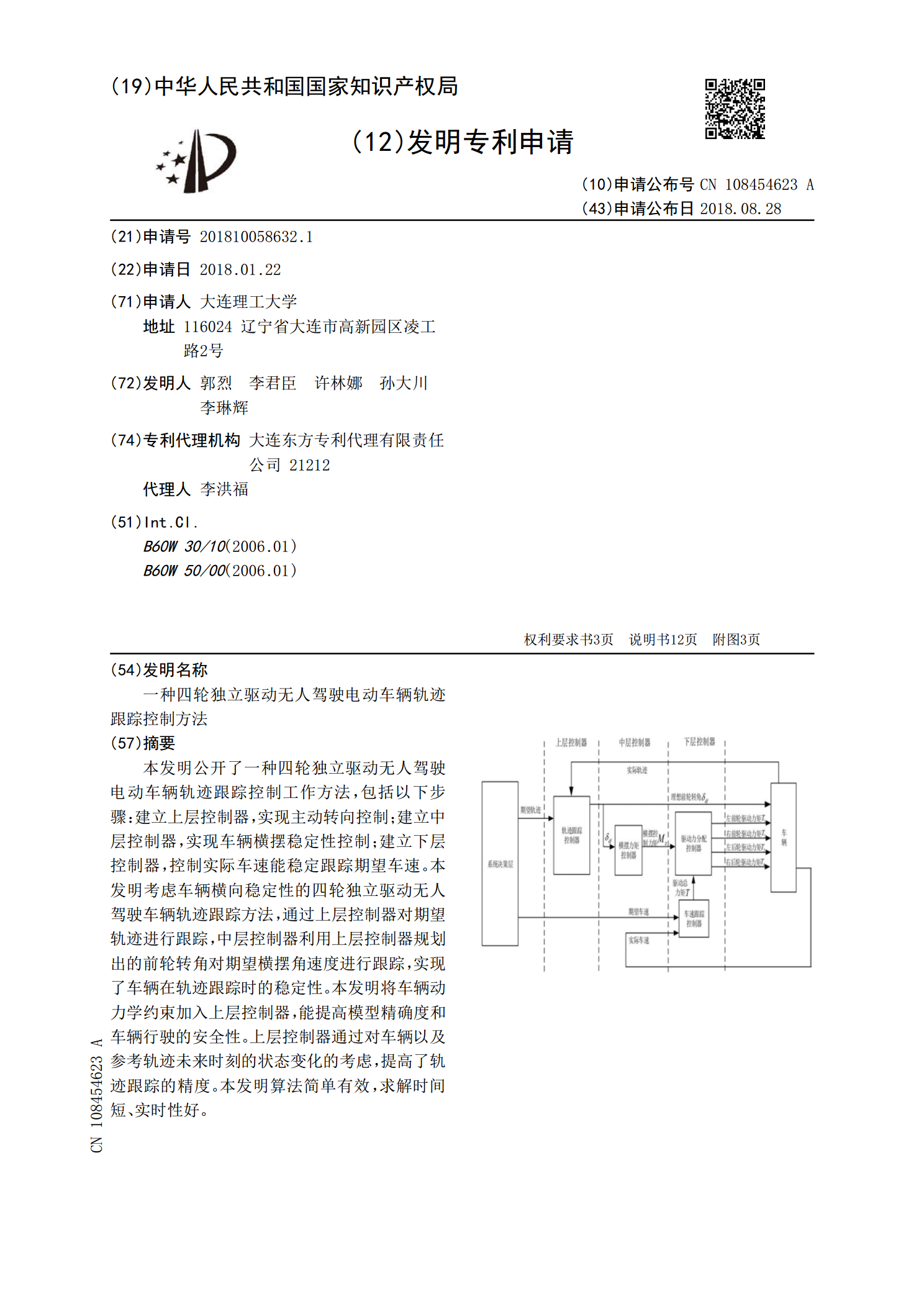
本发明公开了一种四轮独立驱动无人驾驶电动车辆轨迹跟踪控制工作方法,包括以下步骤:建立上层控制器,实现主动转向控制;建立中层控制器,实现车辆横摆稳定性控制;建立下层控制器,控制实际车速能稳定跟踪期望车速。本发明考虑车辆横向稳定性的四轮独立驱动无人驾驶车辆轨迹跟踪方法,通过上层控制器对期望轨迹进行跟踪,中层控制器利用上层控制器规划出的前轮转角对期望横摆角速度进行跟踪,实现了车辆在轨迹跟踪时的稳定性。本发明将车辆动力学约束加入上层控制器,能提高模型精确度和车辆行驶的安全性。上层控制器通过对车辆以及参考轨迹未来时