
一种四轮独立驱动电动车辆的主动转向控制方法.pdf

戊午****jj

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四轮独立驱动电动车辆的主动转向控制方法.pdf
本发明公开一种四轮独立驱动电动车辆的主动转向控制方法,包括以下步骤:预设理想车辆转向模型、状态反馈观测器、前轮转向角控制器和横摆力矩控制器;以车辆直行状态作为初始时刻,实时测量横向速度和横摆角速度,将未知前轮转向角和横摆力矩输入理想车辆转向模型,构造期望的数学模型,将横向速度和横摆角速度期望值与实时值比较,得到实时误差;将实时误差输入到状态观测器,得到稳定闭环系统,通过解线性矩阵不等式方法,既得到实时车辆横向速度和横摆角速度值,也得到实时前轮转向角和横摆力矩值,从而对车辆进行控制。该方法克服了电动车稳定性

电动轮前轴独立驱动汽车差动协同主动转向系统及其控制方法.pdf
本发明公开了一种电动轮前轴独立驱动汽车差动协同主动转向系统,包括:转向齿条,其设置在左转向轮和右转向轮之间,能够产生横向位移,并拉动所述左转向轮和所述右转向轮转向;行星齿轮机构,其包括:第一输入端、第二输入端和输出端,其中所述输出端连接所述转向齿条,能够驱动所述转向齿条产生横向位移;转角耦合电机,其输出轴连接所述第一输入端;转向盘输入轴,其连接所述第二输入端;其中,所述的行星齿轮机构能够实现转向盘输入轴的输入转角和转角耦合电机的输入转角之间的耦合;左轮边独立驱动系统和右轮边独立驱动系统,实现车辆的驱动并提

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及

一种主动转向系统、主动转向控制方法及车辆的控制装置.pdf
本发明涉及汽车工程技术领域,具体涉及一种主动转向系统、主动转向控制方法及车辆的控制装置。通过控制装置控制车辆对当前的转向模式进行选择,当选择当前转向模式为自动驾驶转向模式时,获取路况信息以及车辆状态信息,并根据获取的信息进行理想转角计算,得到理想转矩,然后控制装置控制电动助力装置输出理想转矩至力矩传递机构,液压转向器根据力矩传递机构传递的力矩对车辆轮胎进行液压助力,进而实现对车辆轮胎的主动转向。
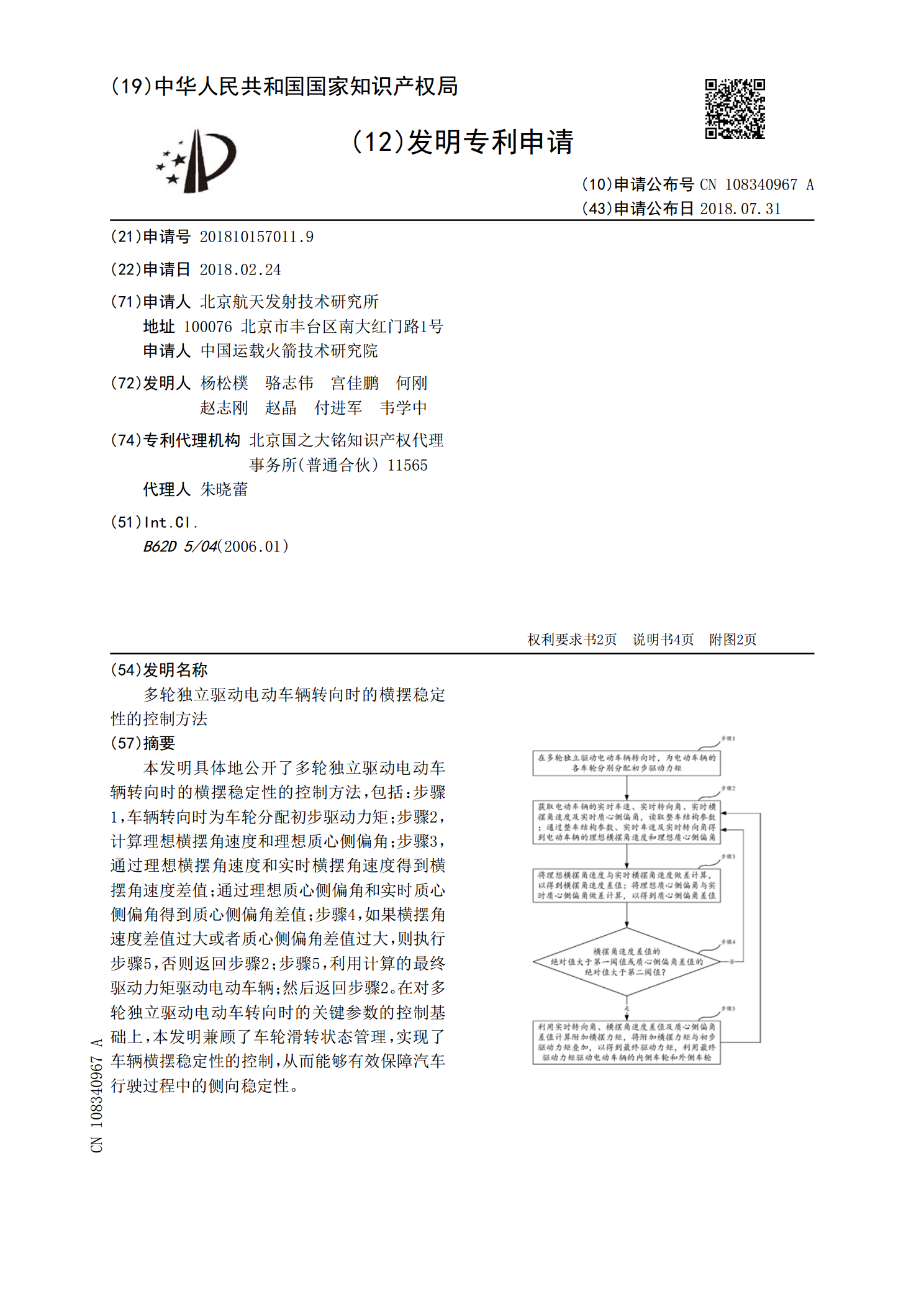
多轮独立驱动电动车辆转向时的横摆稳定性的控制方法.pdf
本发明具体地公开了多轮独立驱动电动车辆转向时的横摆稳定性的控制方法,包括:步骤1,车辆转向时为车轮分配初步驱动力矩;步骤2,计算理想横摆角速度和理想质心侧偏角;步骤3,通过理想横摆角速度和实时横摆角速度得到横摆角速度差值;通过理想质心侧偏角和实时质心侧偏角得到质心侧偏角差值;步骤4,如果横摆角速度差值过大或者质心侧偏角差值过大,则执行步骤5,否则返回步骤2;步骤5,利用计算的最终驱动力矩驱动电动车辆;然后返回步骤2。在对多轮独立驱动电动车转向时的关键参数的控制基础上,本发明兼顾了车轮滑转状态管理,实现了车