
一种无人车辆独立转向装置.pdf

一吃****成益


1/7
2/7

3/7
4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无人车辆独立转向装置.pdf
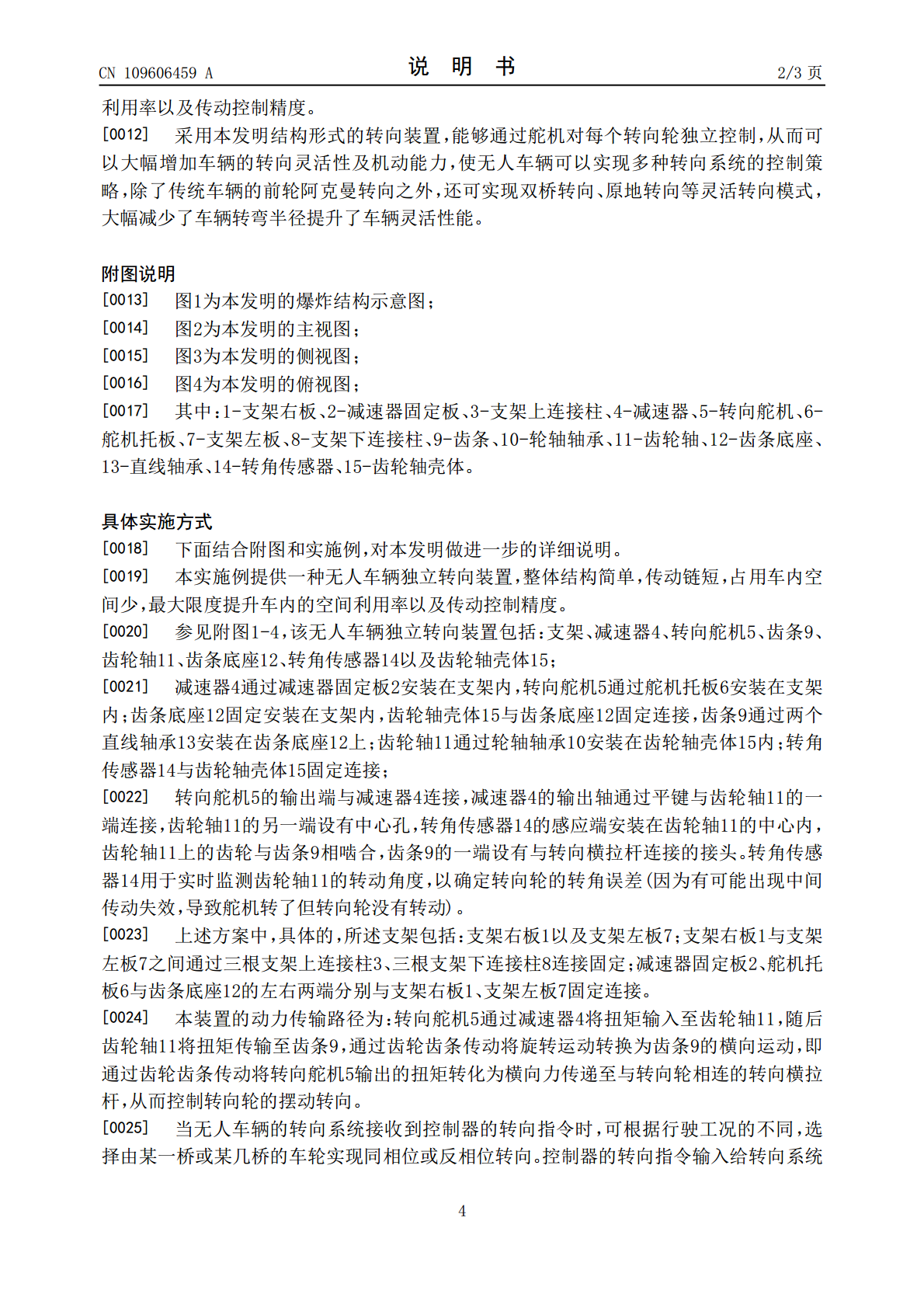
本发明提供一种无人车辆独立转向装置,涉及无人车辆技术领域。该无人车辆转向装置的具体方案是:减速器、转向舵机、齿条底座安装在支架内;齿轮轴壳体与齿条底座固定连接,齿条通过直线轴承安装在齿条底座上;齿轮轴通过轮轴轴承安装在齿轮轴壳体内;转角传感器与齿轮轴壳体固定连接;转向舵机的输出端与减速器连接,减速器的输出轴与齿轮轴的一端连接,齿轮轴的齿轮与齿条相啮合,齿条的一端设有与转向横拉杆连接的接头。本发明选用伺服舵机为转向器提供动力源,整体结构简单,传动链短,占用车内空间少,最大限度提升车内的空间利用率以及传动控制
一种独立驱动的全轮转向电动化无人车辆底盘.pdf
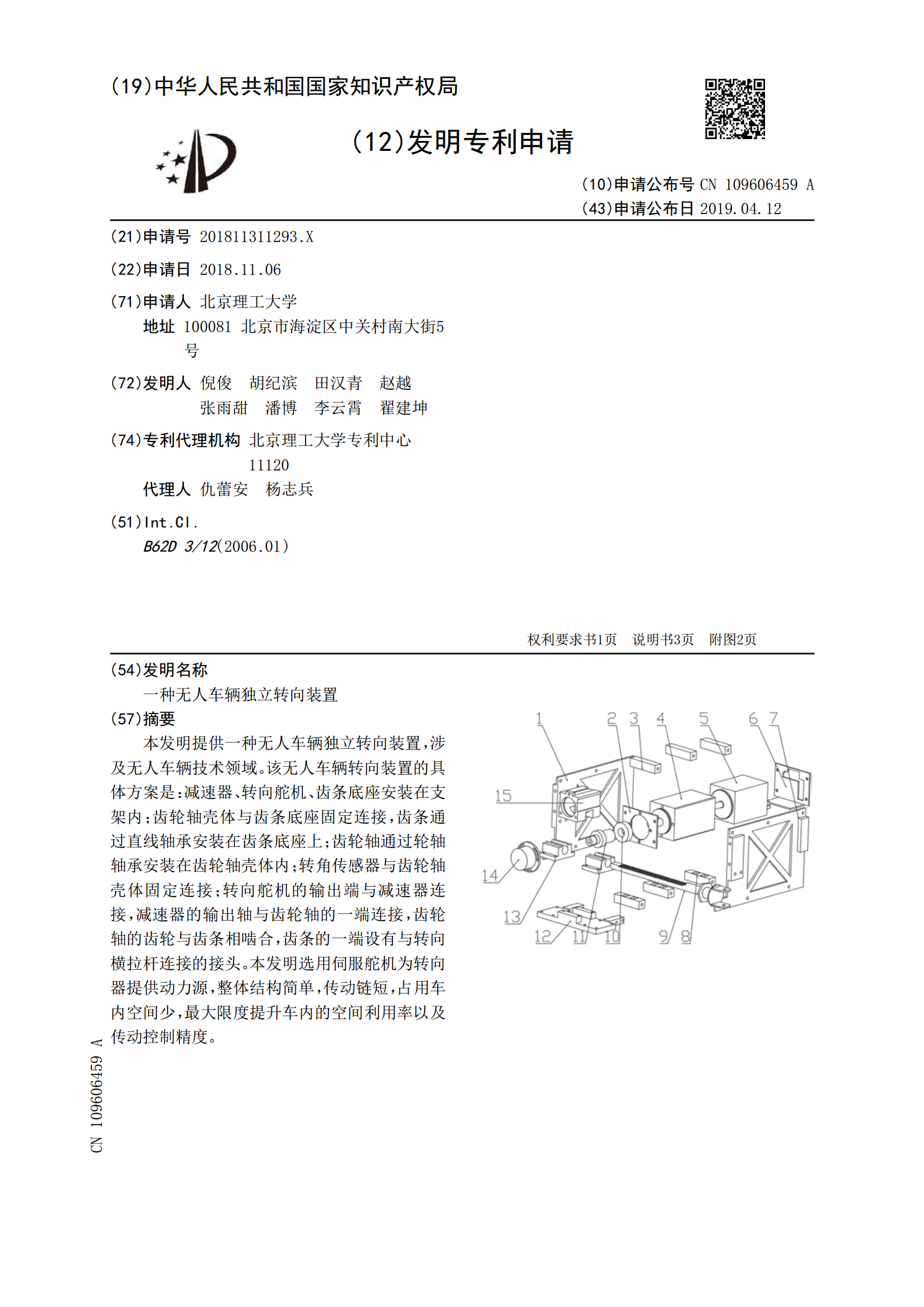
本发明提供一种独立驱动的全轮转向电动化无人车辆底盘,包括:车身车架系统、电路系统、四个车轮,每个车轮分别通过与之对应的驱动系统、转向系统和制动系统独立驱动、转向和制动;每个所述车轮通过一套悬架系统与所述车架相连;车身车架系统包括用于为所述驱动系统、转向系统、悬架系统和制动系统提供安装支撑的车架和外包在所述车架外的非承载式车身;所述电路系统包括:整车控制器、供电单元和八个电机控制器。该底盘的每个车轮均能实现独立驱动、制动和转向,且驱动、制动和转向全部采用线控,通用性高。
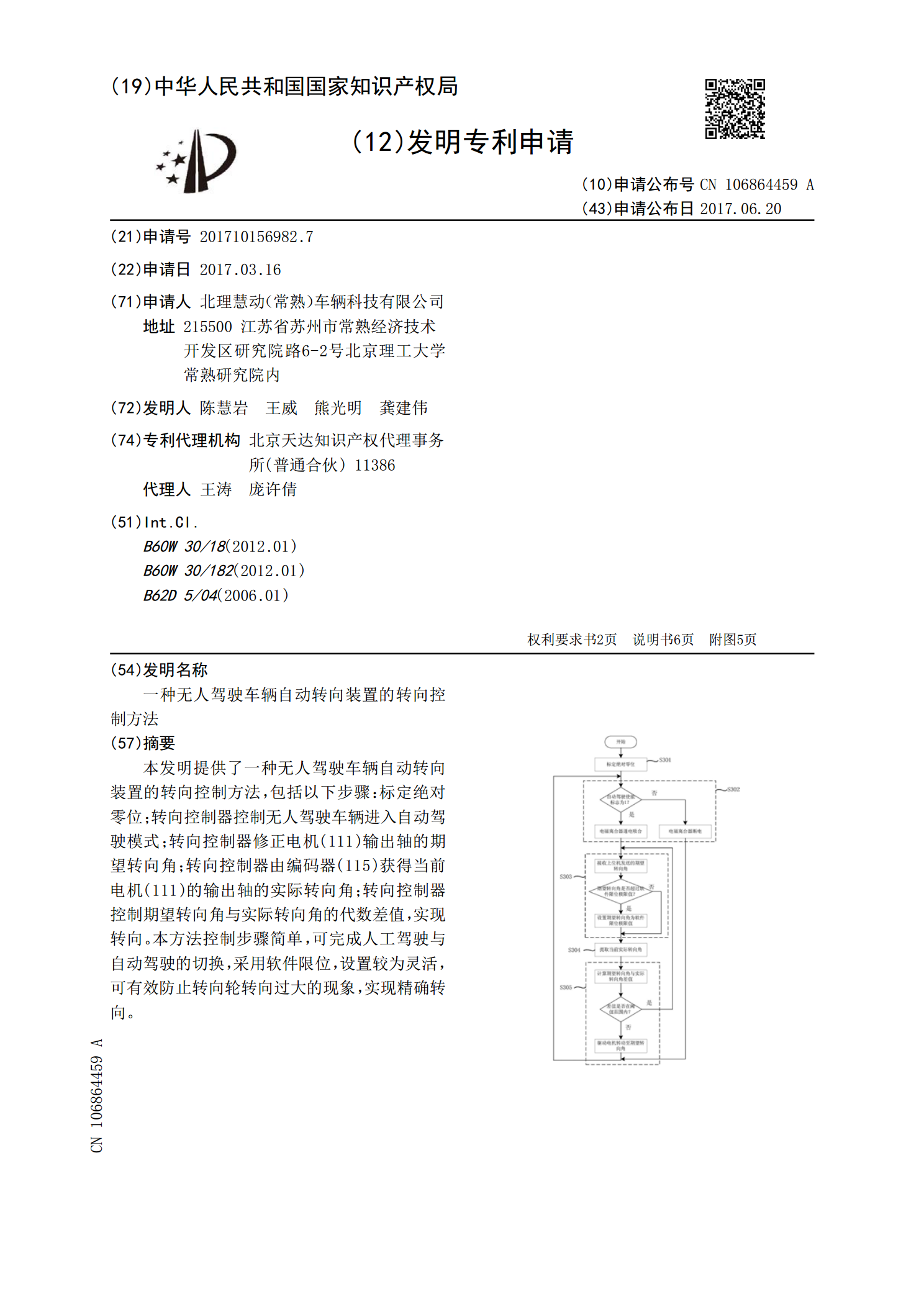
一种无人驾驶车辆自动转向装置的转向控制方法.pdf
本发明提供了一种无人驾驶车辆自动转向装置的转向控制方法,包括以下步骤:标定绝对零位;转向控制器控制无人驾驶车辆进入自动驾驶模式;转向控制器修正电机(111)输出轴的期望转向角;转向控制器由编码器(115)获得当前电机(111)的输出轴的实际转向角;转向控制器控制期望转向角与实际转向角的代数差值,实现转向。本方法控制步骤简单,可完成人工驾驶与自动驾驶的切换,采用软件限位,设置较为灵活,可有效防止转向轮转向过大的现象,实现精确转向。

一种无人驾驶车辆转向装置及其控制方法.pdf
本发明公开了一种无人驾驶车辆转向装置及其控制方法,其特征是具有:一电机,为转向驱动机构;一相互啮合的蜗轮和蜗杆,所述蜗杆与电机的输出轴直接联接;一电磁离合器,以所述蜗轮与电磁离合器的主动端固联;以所述电磁离合器的被动端与方向盘转向柱固联,一编码器,连接于电机后端的输出轴上。本发明可实现无人驾驶车辆的自动转向控制,并可在无人驾驶和人工驾驶两种模式下自由切换且互不影响,其结构紧凑、成本低、传动效率较高、车辆自动转向的智能化程度较高、原车的结构和外观皆不受破坏、易于装拆,并能应用于有自动回转要求的其它场合。
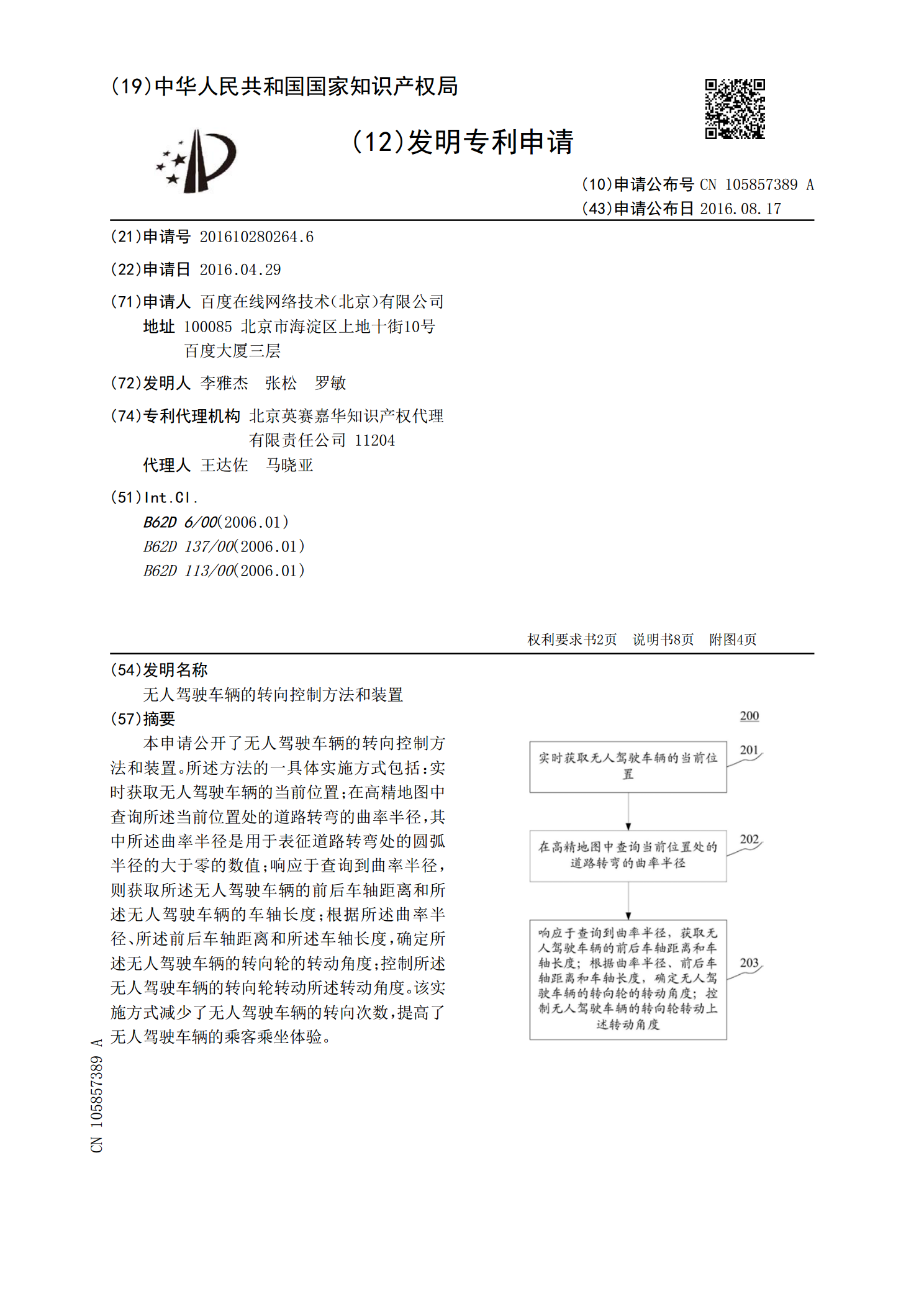
无人驾驶车辆的转向控制方法和装置.pdf
本申请公开了无人驾驶车辆的转向控制方法和装置。所述方法的一具体实施方式包括:实时获取无人驾驶车辆的当前位置;在高精地图中查询所述当前位置处的道路转弯的曲率半径,其中所述曲率半径是用于表征道路转弯处的圆弧半径的大于零的数值;响应于查询到曲率半径,则获取所述无人驾驶车辆的前后车轴距离和所述无人驾驶车辆的车轴长度;根据所述曲率半径、所述前后车轴距离和所述车轴长度,确定所述无人驾驶车辆的转向轮的转动角度;控制所述无人驾驶车辆的转向轮转动所述转动角度。该实施方式减少了无人驾驶车辆的转向次数,提高了无人驾驶车辆的乘客