
自适应弧面磁吸附爬行机器人.pdf

黛娥****ak

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自适应弧面磁吸附爬行机器人.pdf
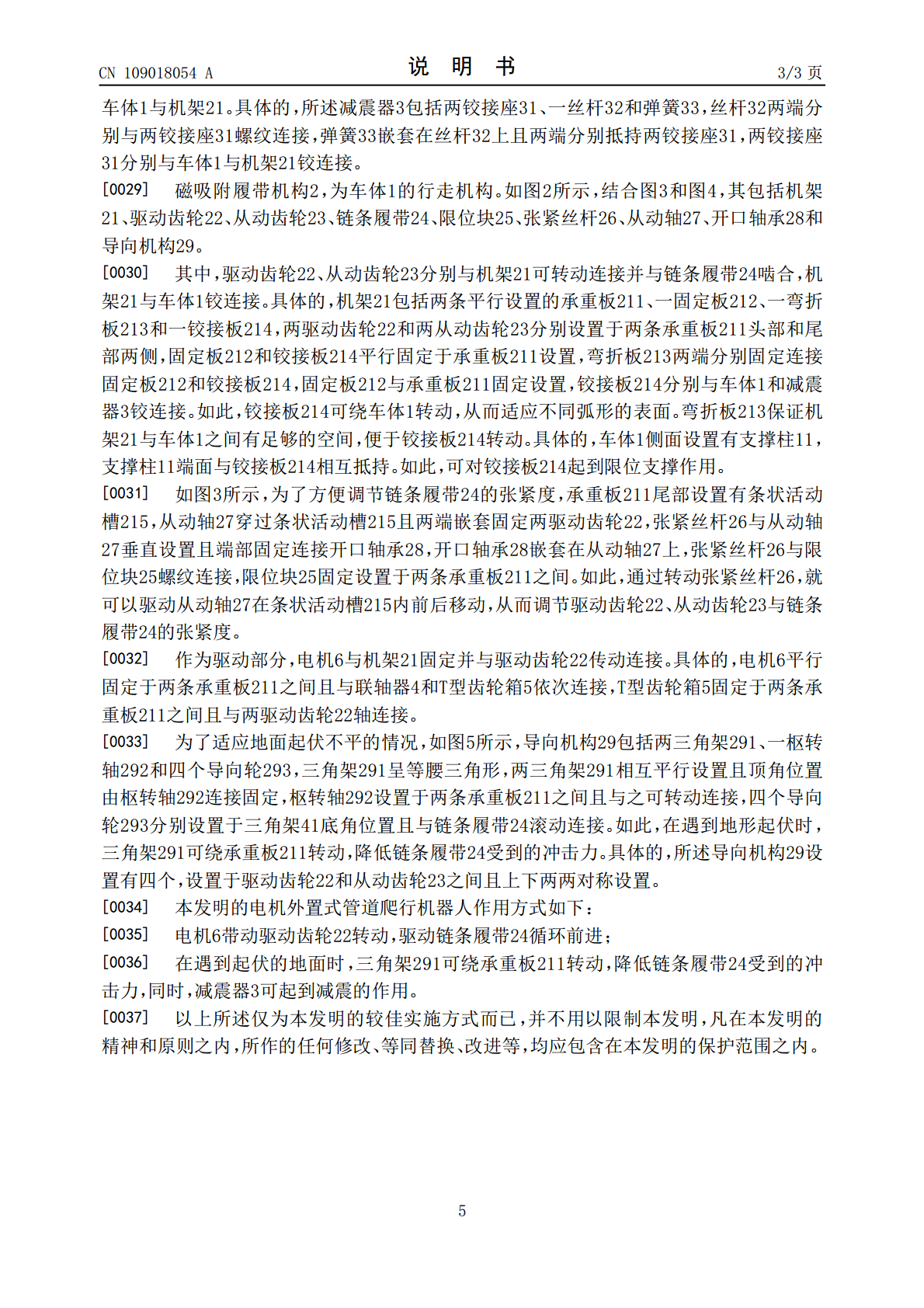
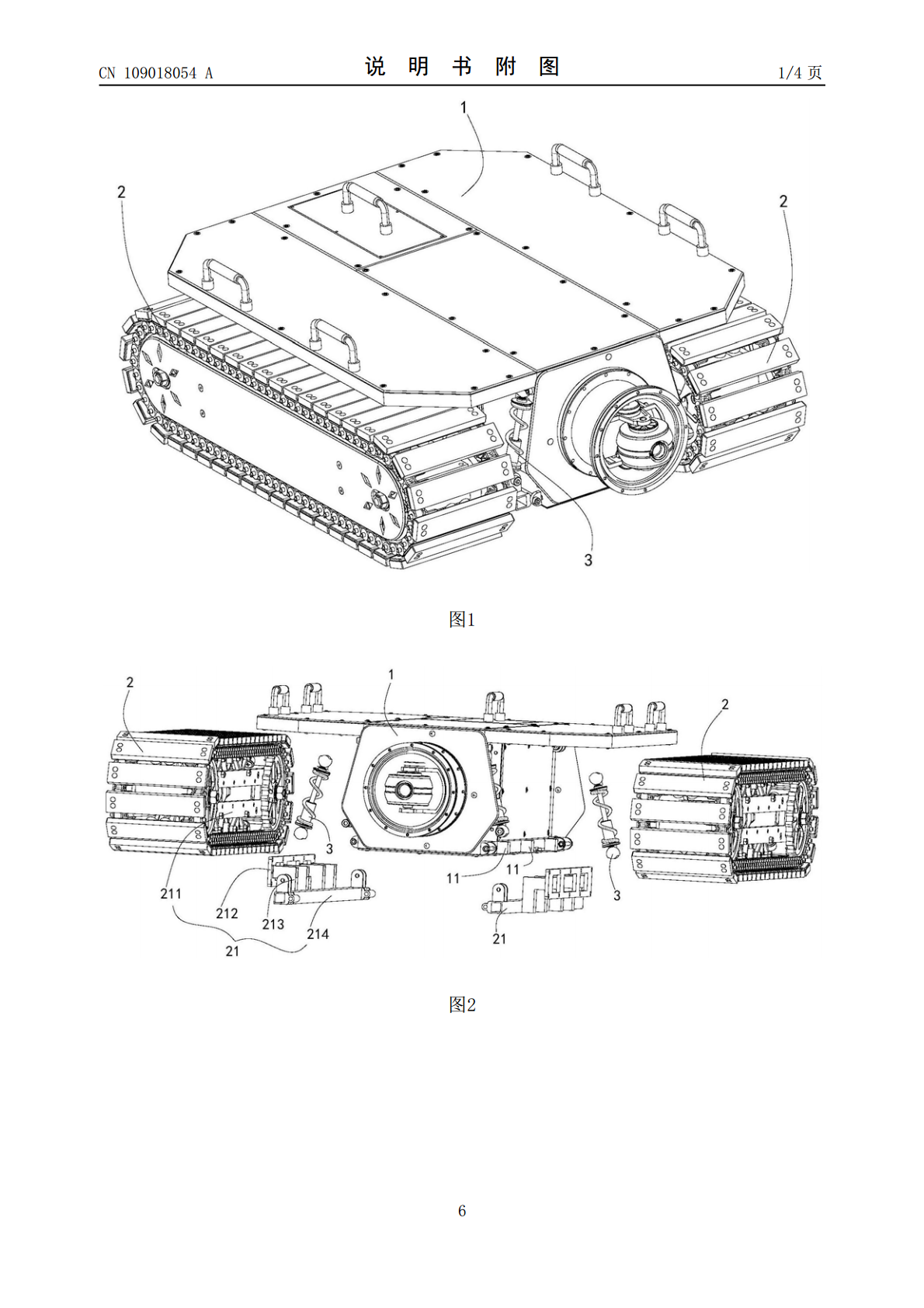
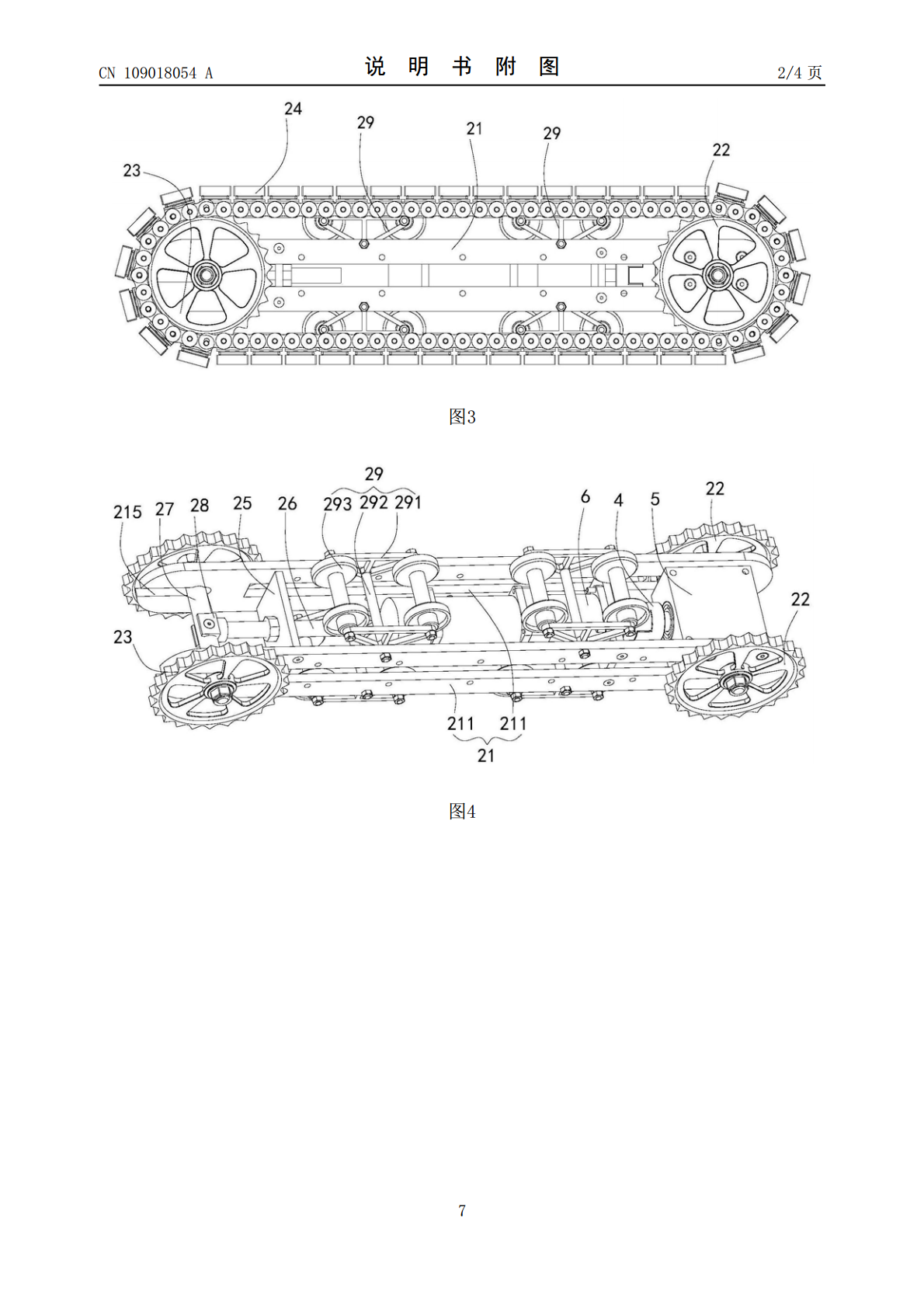
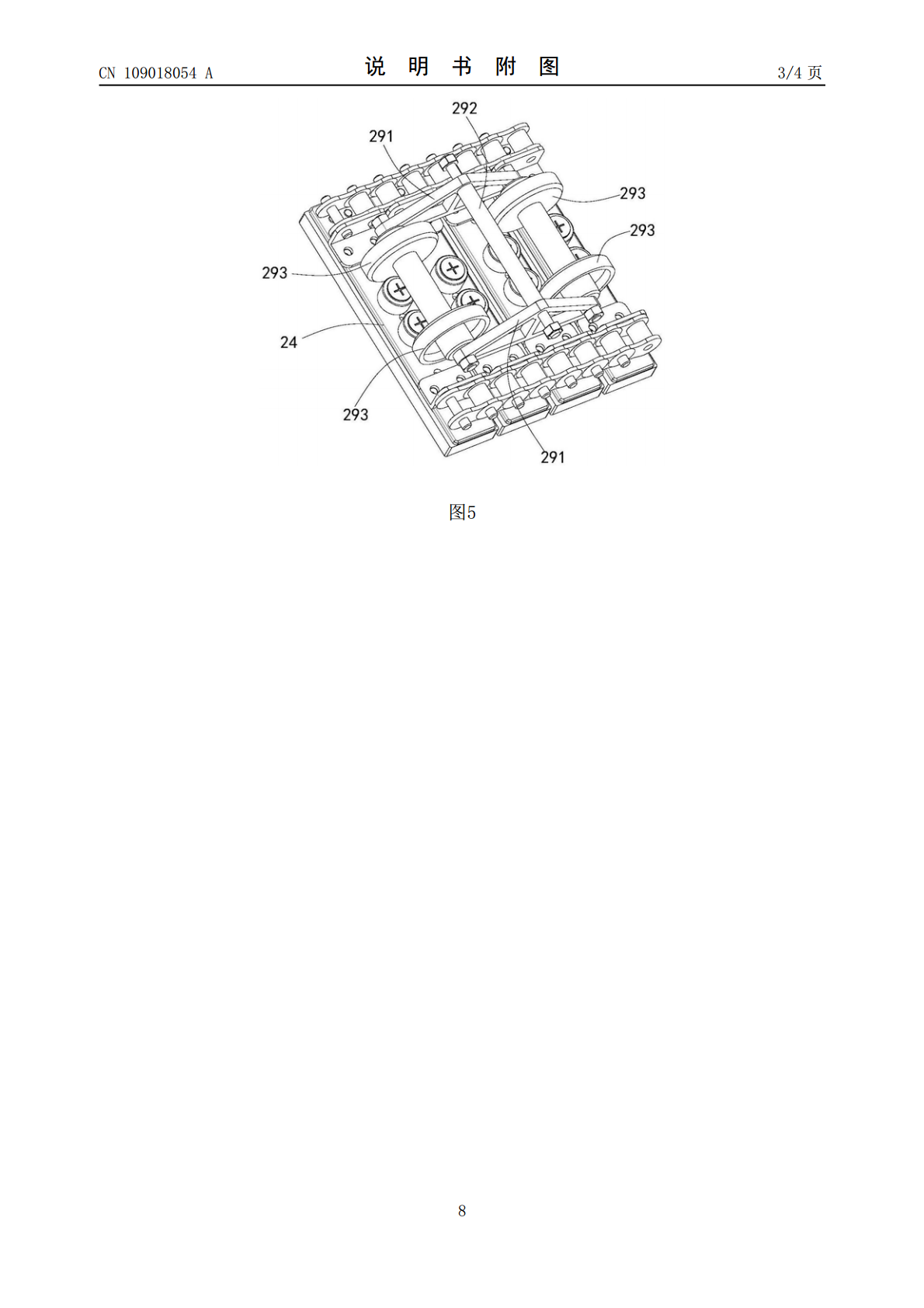
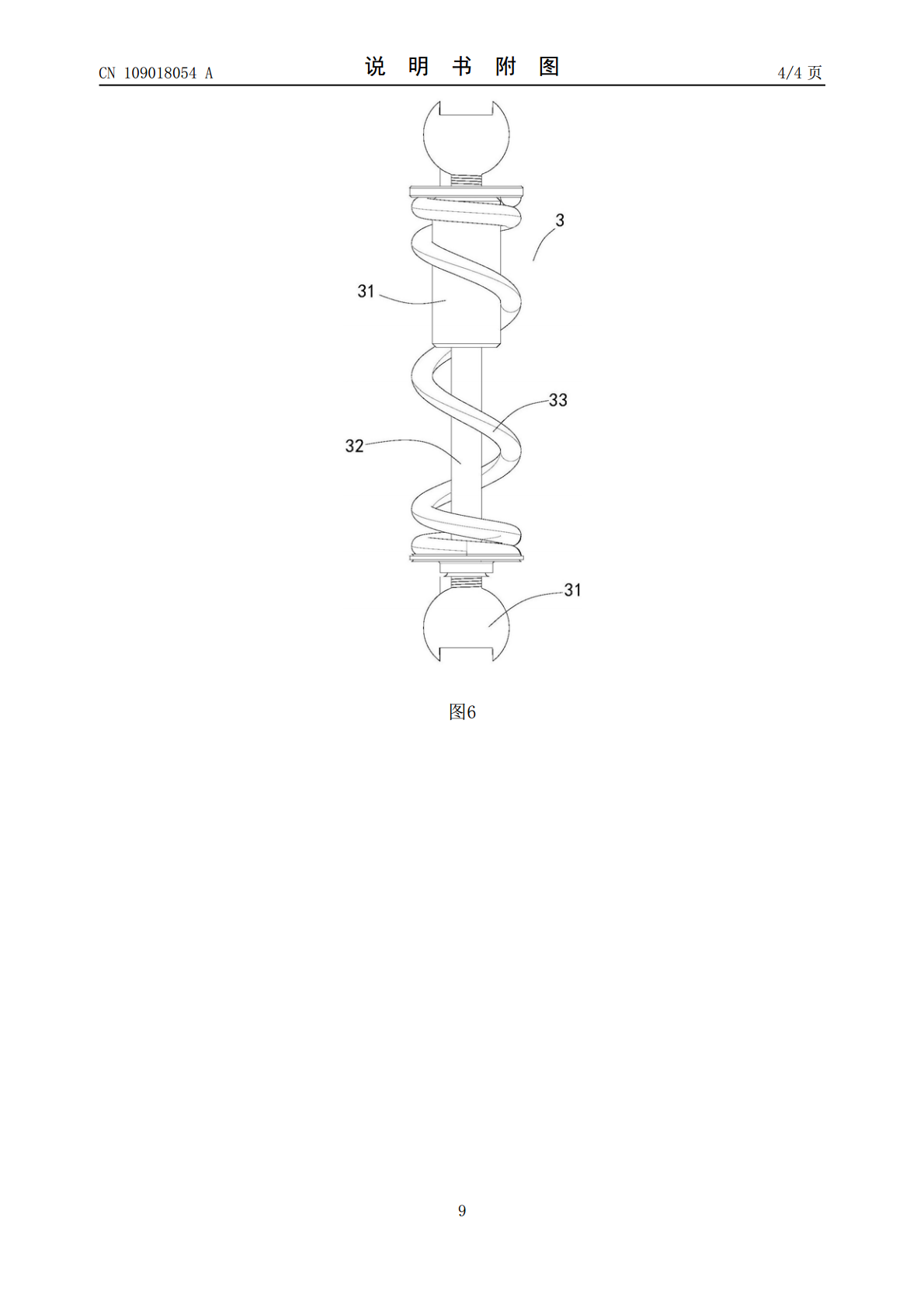
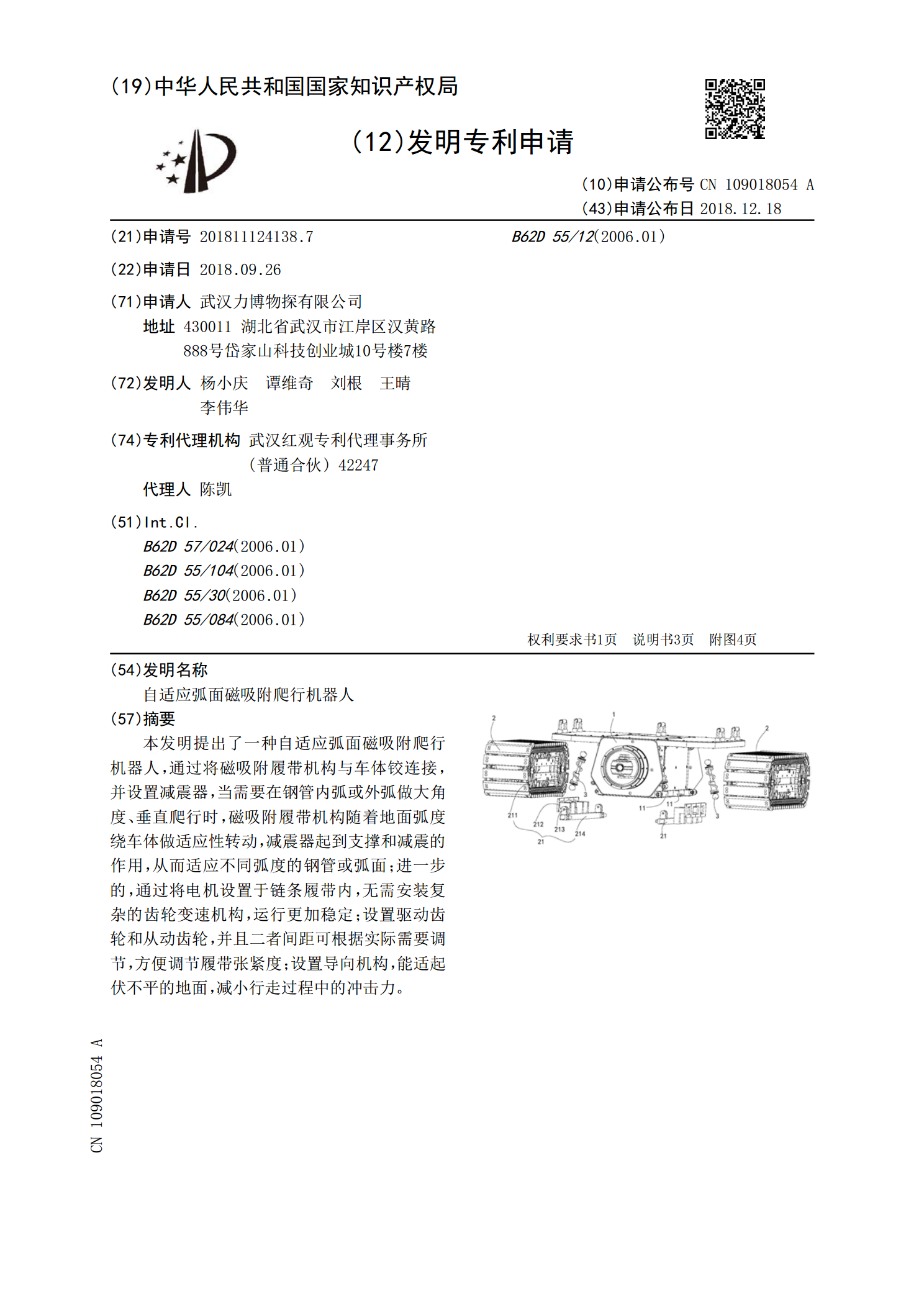
本发明提出了一种自适应弧面磁吸附爬行机器人,通过将磁吸附履带机构与车体铰连接,并设置减震器,当需要在钢管内弧或外弧做大角度、垂直爬行时,磁吸附履带机构随着地面弧度绕车体做适应性转动,减震器起到支撑和减震的作用,从而适应不同弧度的钢管或弧面;进一步的,通过将电机设置于链条履带内,无需安装复杂的齿轮变速机构,运行更加稳定;设置驱动齿轮和从动齿轮,并且二者间距可根据实际需要调节,方便调节履带张紧度;设置导向机构,能适起伏不平的地面,减小行走过程中的冲击力。
一种磁吸附自适应曲面爬行机器人.pdf
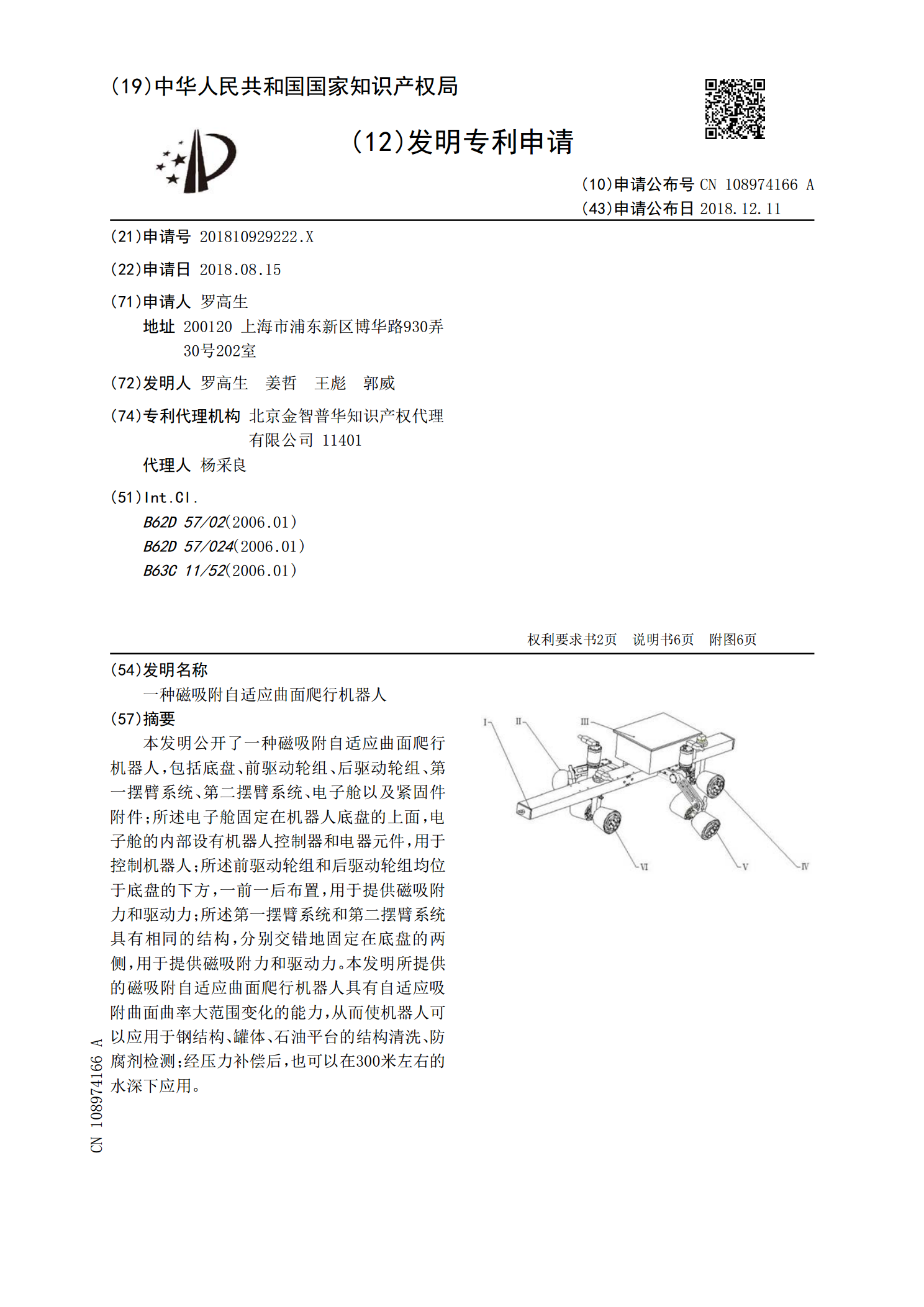
本发明公开了一种磁吸附自适应曲面爬行机器人,包括底盘、前驱动轮组、后驱动轮组、第一摆臂系统、第二摆臂系统、电子舱以及紧固件附件;所述电子舱固定在机器人底盘的上面,电子舱的内部设有机器人控制器和电器元件,用于控制机器人;所述前驱动轮组和后驱动轮组均位于底盘的下方,一前一后布置,用于提供磁吸附力和驱动力;所述第一摆臂系统和第二摆臂系统具有相同的结构,分别交错地固定在底盘的两侧,用于提供磁吸附力和驱动力。本发明所提供的磁吸附自适应曲面爬行机器人具有自适应吸附曲面曲率大范围变化的能力,从而使机器人可以应用于钢结构
磁吸附爬行机器人履带机构.pdf
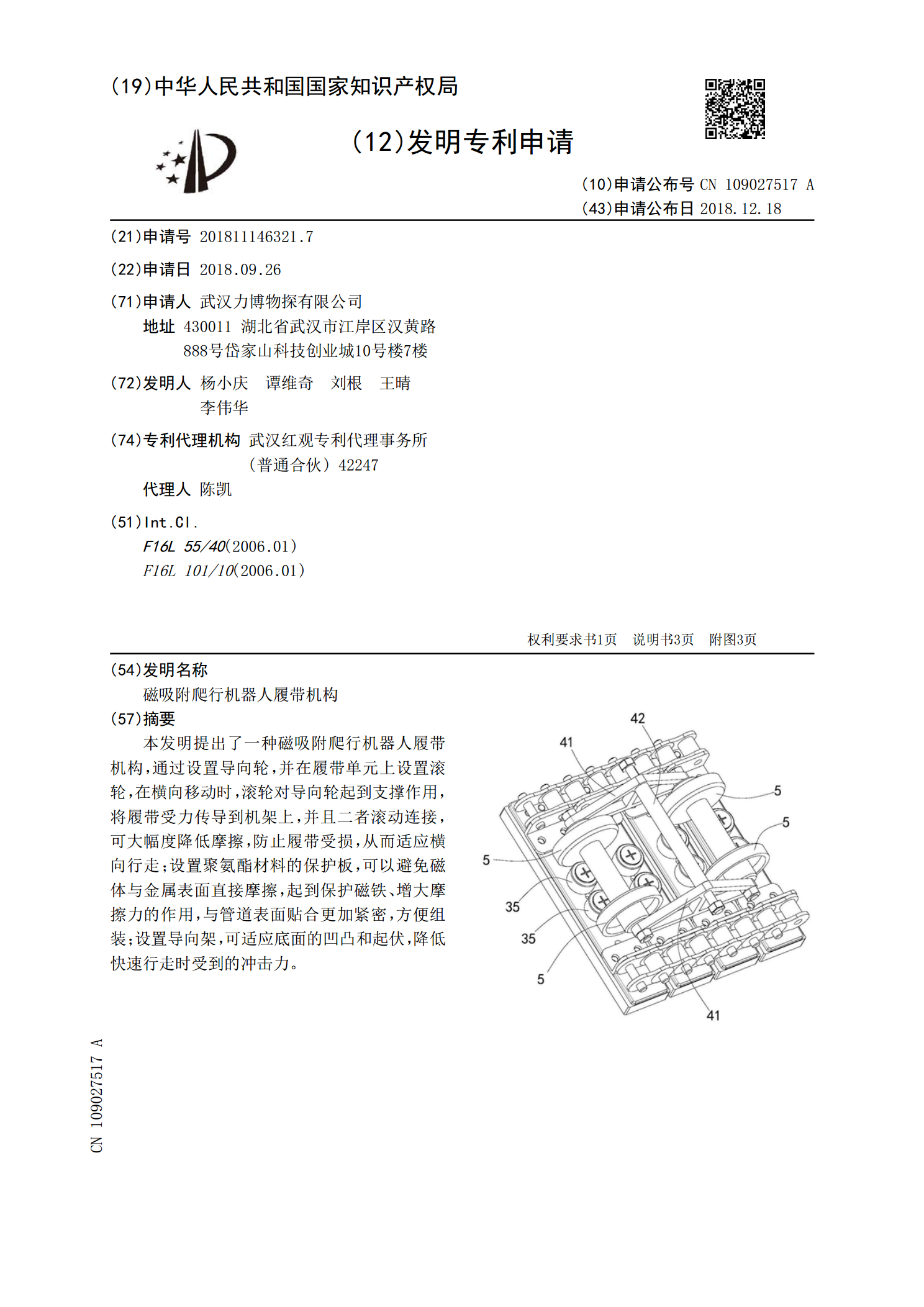
本发明提出了一种磁吸附爬行机器人履带机构,通过设置导向轮,并在履带单元上设置滚轮,在横向移动时,滚轮对导向轮起到支撑作用,将履带受力传导到机架上,并且二者滚动连接,可大幅度降低摩擦,防止履带受损,从而适应横向行走;设置聚氨酯材料的保护板,可以避免磁体与金属表面直接摩擦,起到保护磁铁、增大摩擦力的作用,与管道表面贴合更加紧密,方便组装;设置导向架,可适应底面的凹凸和起伏,降低快速行走时受到的冲击力。
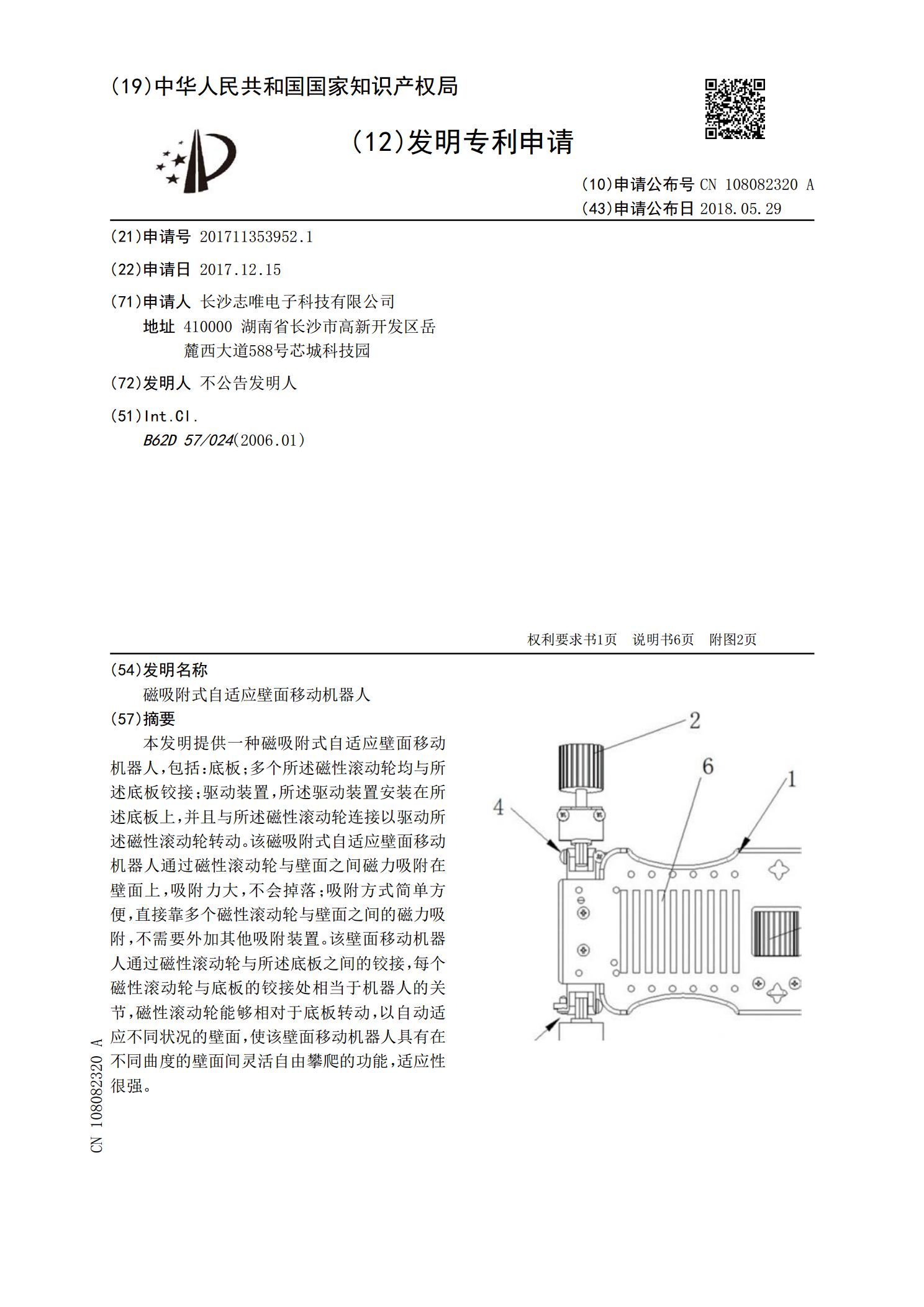
磁吸附式自适应壁面移动机器人.pdf
本发明提供一种磁吸附式自适应壁面移动机器人,包括:底板;多个所述磁性滚动轮均与所述底板铰接;驱动装置,所述驱动装置安装在所述底板上,并且与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式自适应壁面移动机器人通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置。该壁面移动机器人通过磁性滚动轮与所述底板之间的铰接,每个磁性滚动轮与底板的铰接处相当于机器人的关节,磁性滚动轮能够相对于底板转动,以自动适应不同状况的壁
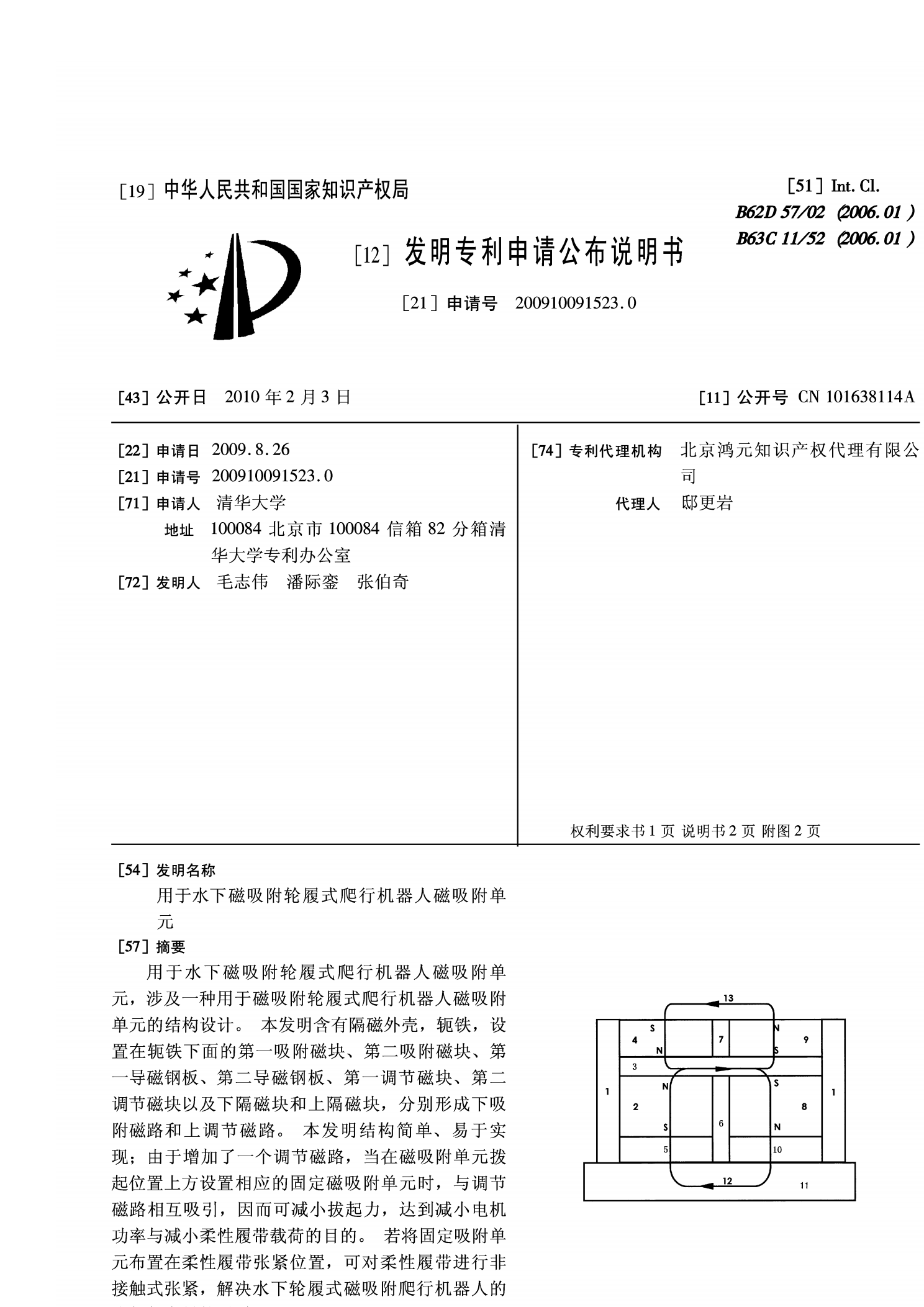
用于水下磁吸附轮履式爬行机器人磁吸附单元.pdf
用于水下磁吸附轮履式爬行机器人磁吸附单元,涉及一种用于磁吸附轮履式爬行机器人磁吸附单元的结构设计。本发明含有隔磁外壳,轭铁,设置在轭铁下面的第一吸附磁块、第二吸附磁块、第一导磁钢板、第二导磁钢板、第一调节磁块、第二调节磁块以及下隔磁块和上隔磁块,分别形成下吸附磁路和上调节磁路。本发明结构简单、易于实现;由于增加了一个调节磁路,当在磁吸附单元拨起位置上方设置相应的固定磁吸附单元时,与调节磁路相互吸引,因而可减小拔起力,达到减小电机功率与减小柔性履带载荷的目的。若将固定吸附单元布置在柔性履带张紧位置