
一种减速机动能纠正系统及其动能纠正方法.pdf

Ja****44

1/10
2/10
3/10
4/10
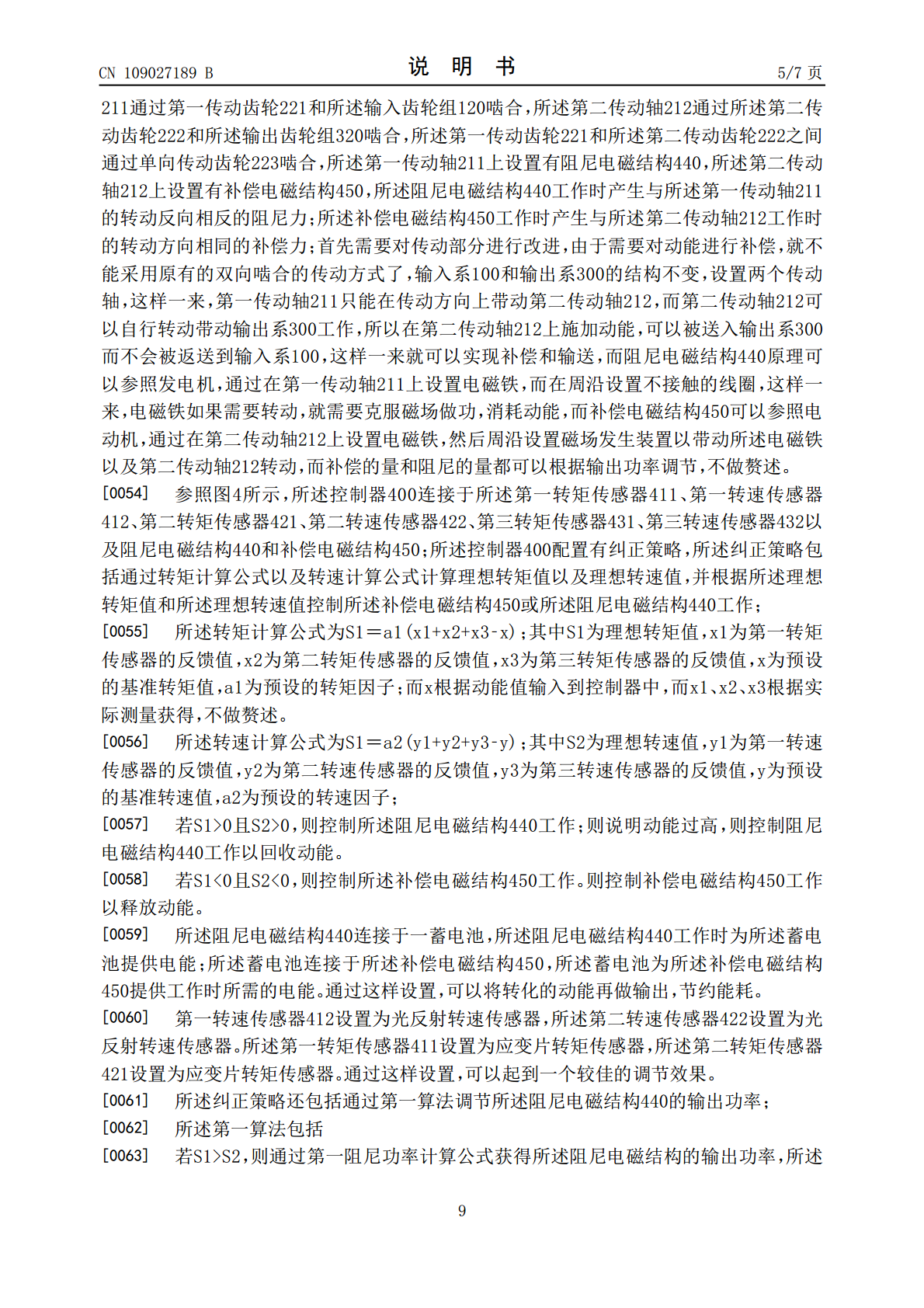
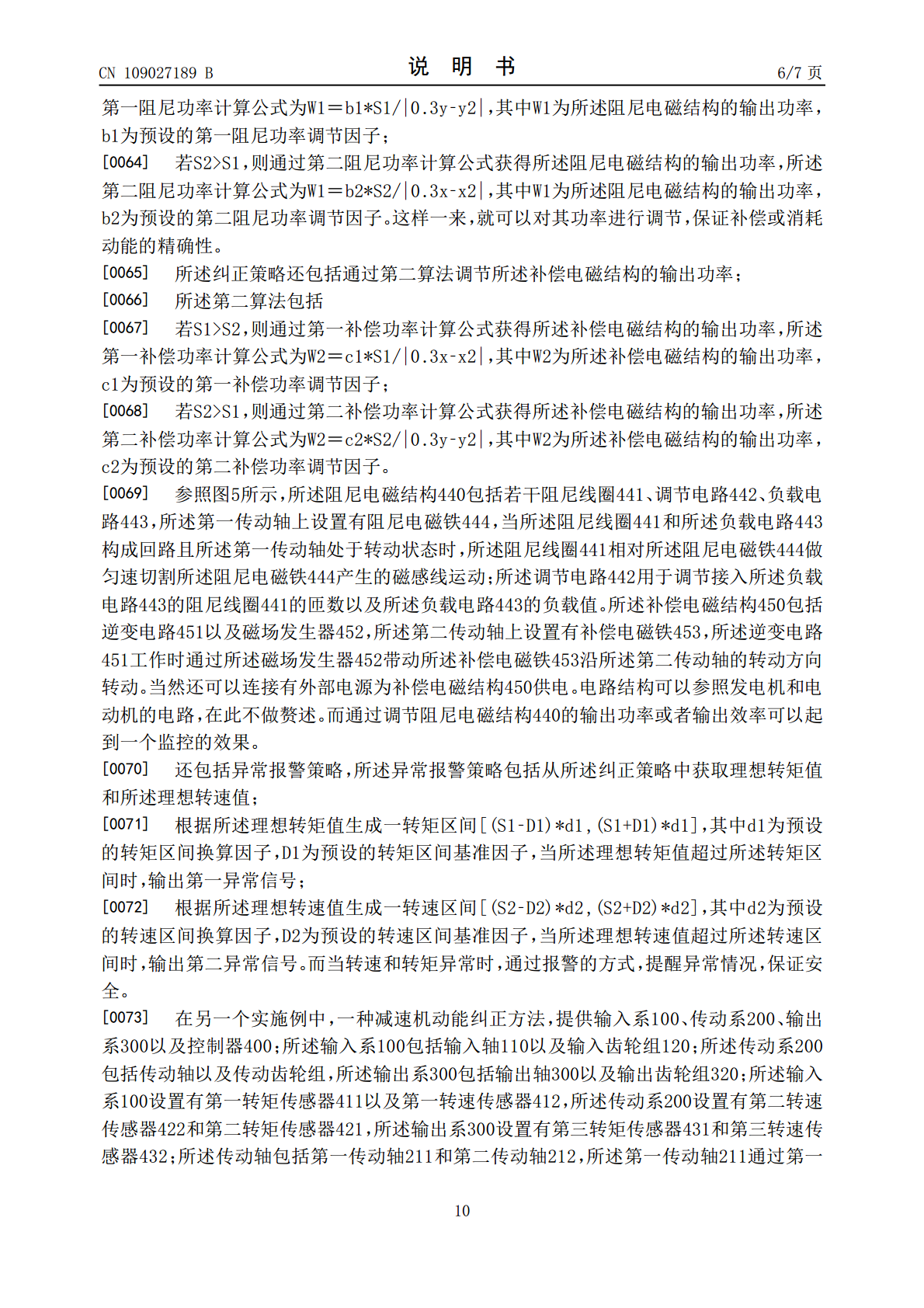
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种减速机动能纠正系统及其动能纠正方法.pdf
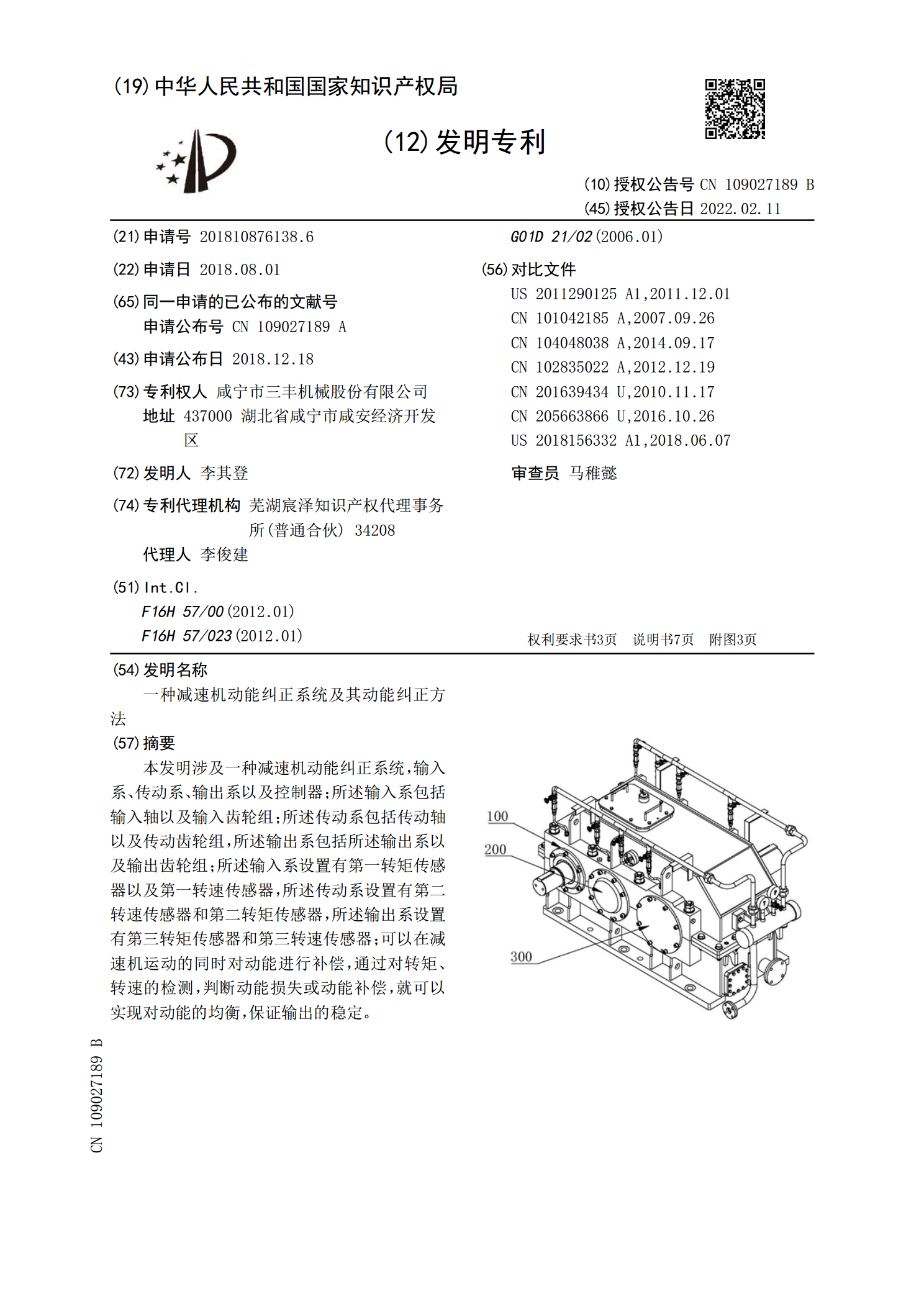
本发明涉及一种减速机动能纠正系统,输入系、传动系、输出系以及控制器;所述输入系包括输入轴以及输入齿轮组;所述传动系包括传动轴以及传动齿轮组,所述输出系包括所述输出系以及输出齿轮组;所述输入系设置有第一转矩传感器以及第一转速传感器,所述传动系设置有第二转速传感器和第二转矩传感器,所述输出系设置有第三转矩传感器和第三转速传感器;可以在减速机运动的同时对动能进行补偿,通过对转矩、转速的检测,判断动能损失或动能补偿,就可以实现对动能的均衡,保证输出的稳定。

一种基于车轮制动的车道偏离纠正系统及其纠正方法.pdf
本发明提供了一种基于车轮制动的车道偏离纠正系统,包括偏离纠正单元、CAN通信单元和智能手机单元,所述偏离纠正单元的ESP/VSC控制模块中的两个信号输出端分别与左右后轮制动压力电磁阀的信号输入端连接,所述ESP/VSC控制模块通过CAN总线接口与CAN通信单元中的总线控制模块通信连接,总线控制模块的信号输出端依次通过车载信息处理模块和蓝牙模块A与智能手机单元中的蓝牙模块B通信连接,所述蓝牙模块B与智能手机处理模块通信连接;所述智能手机处理模块的信号输入端还与图像收集模块的信号输出端连接,信号输出端分别与显
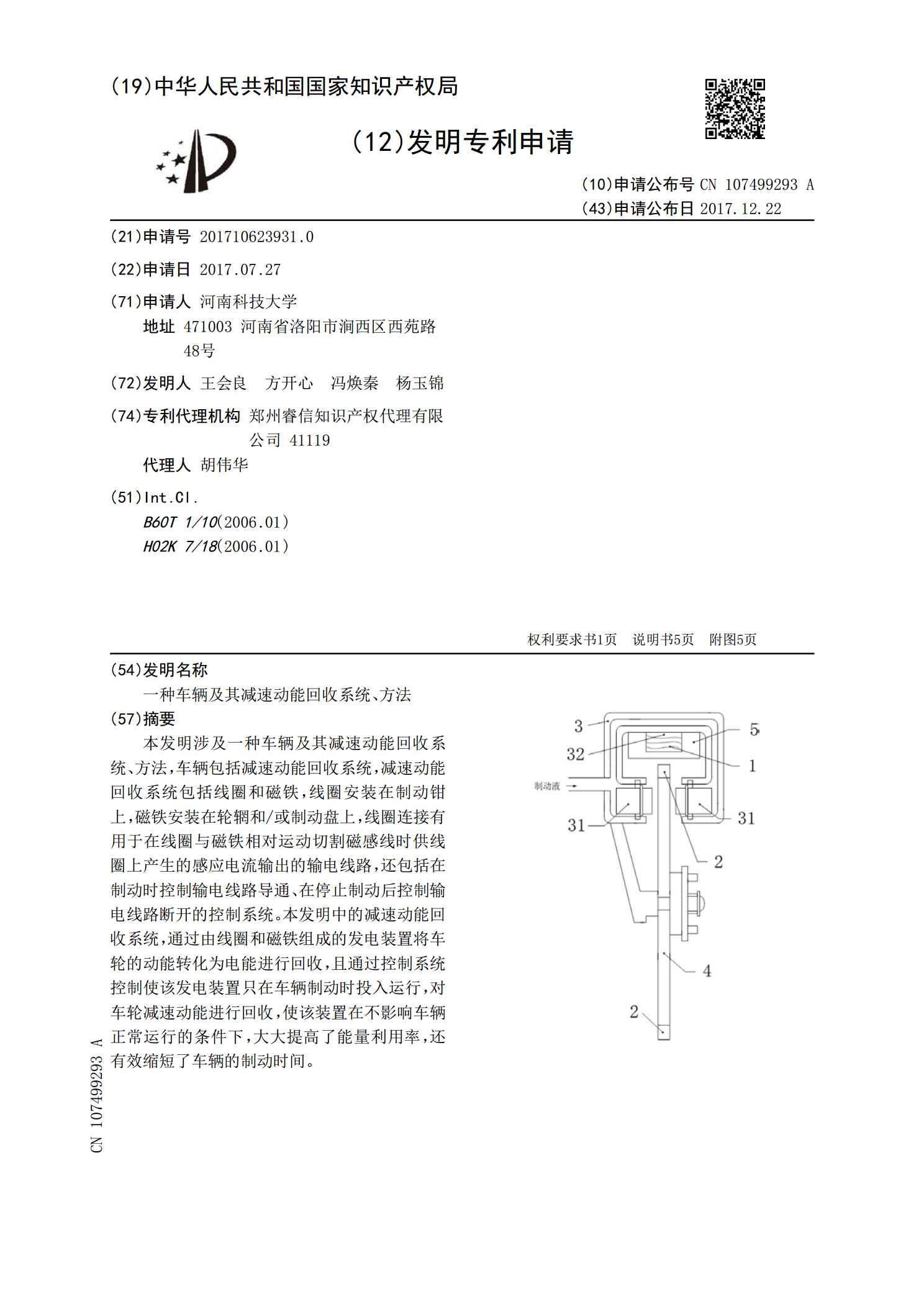
一种车辆及其减速动能回收系统、方法.pdf
本发明涉及一种车辆及其减速动能回收系统、方法,车辆包括减速动能回收系统,减速动能回收系统包括线圈和磁铁,线圈安装在制动钳上,磁铁安装在轮辋和/或制动盘上,线圈连接有用于在线圈与磁铁相对运动切割磁感线时供线圈上产生的感应电流输出的输电线路,还包括在制动时控制输电线路导通、在停止制动后控制输电线路断开的控制系统。本发明中的减速动能回收系统,通过由线圈和磁铁组成的发电装置将车轮的动能转化为电能进行回收,且通过控制系统控制使该发电装置只在车辆制动时投入运行,对车轮减速动能进行回收,使该装置在不影响车辆正常运行的条
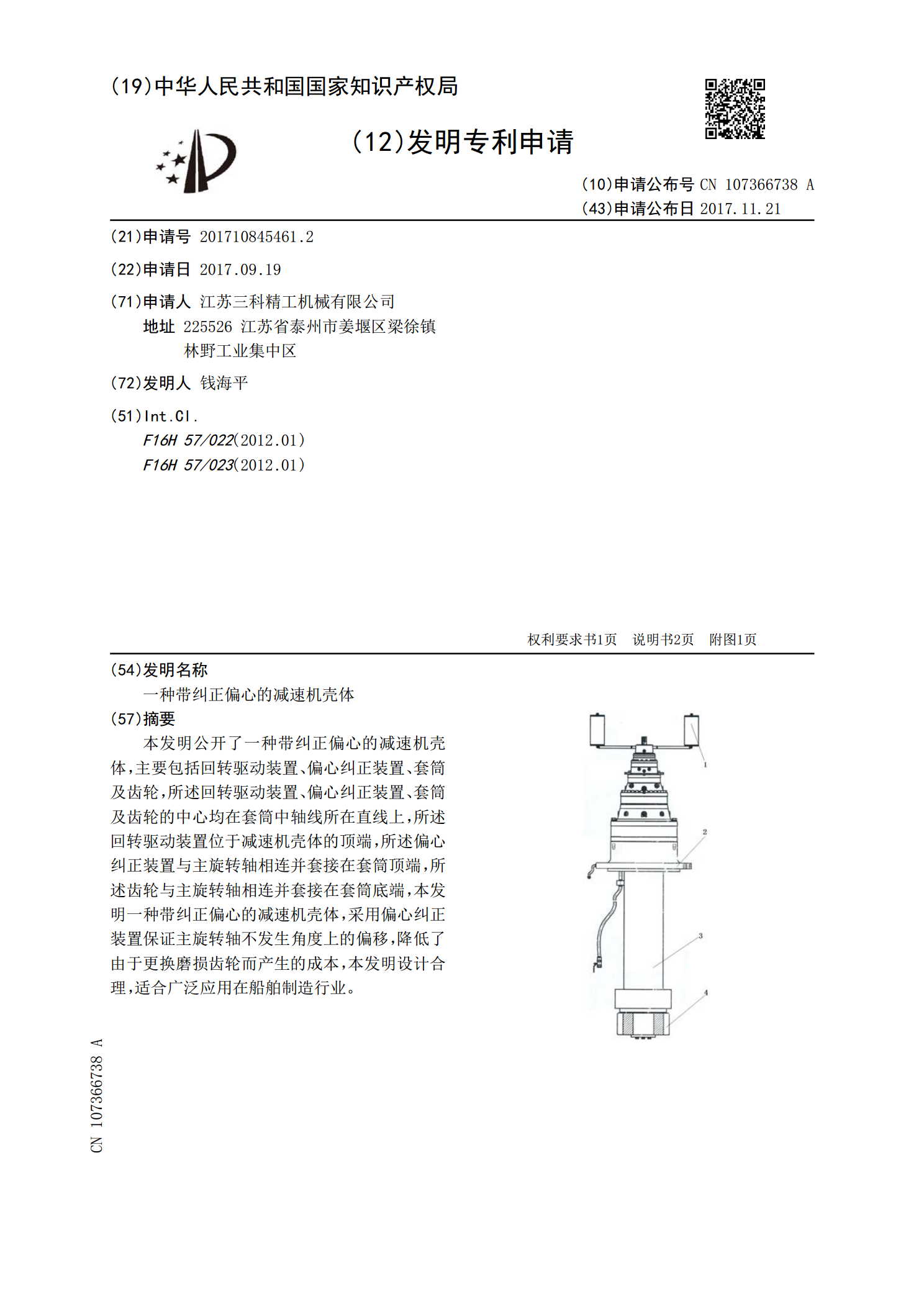
一种带纠正偏心的减速机壳体.pdf
本发明公开了一种带纠正偏心的减速机壳体,主要包括回转驱动装置、偏心纠正装置、套筒及齿轮,所述回转驱动装置、偏心纠正装置、套筒及齿轮的中心均在套筒中轴线所在直线上,所述回转驱动装置位于减速机壳体的顶端,所述偏心纠正装置与主旋转轴相连并套接在套筒顶端,所述齿轮与主旋转轴相连并套接在套筒底端,本发明一种带纠正偏心的减速机壳体,采用偏心纠正装置保证主旋转轴不发生角度上的偏移,降低了由于更换磨损齿轮而产生的成本,本发明设计合理,适合广泛应用在船舶制造行业。
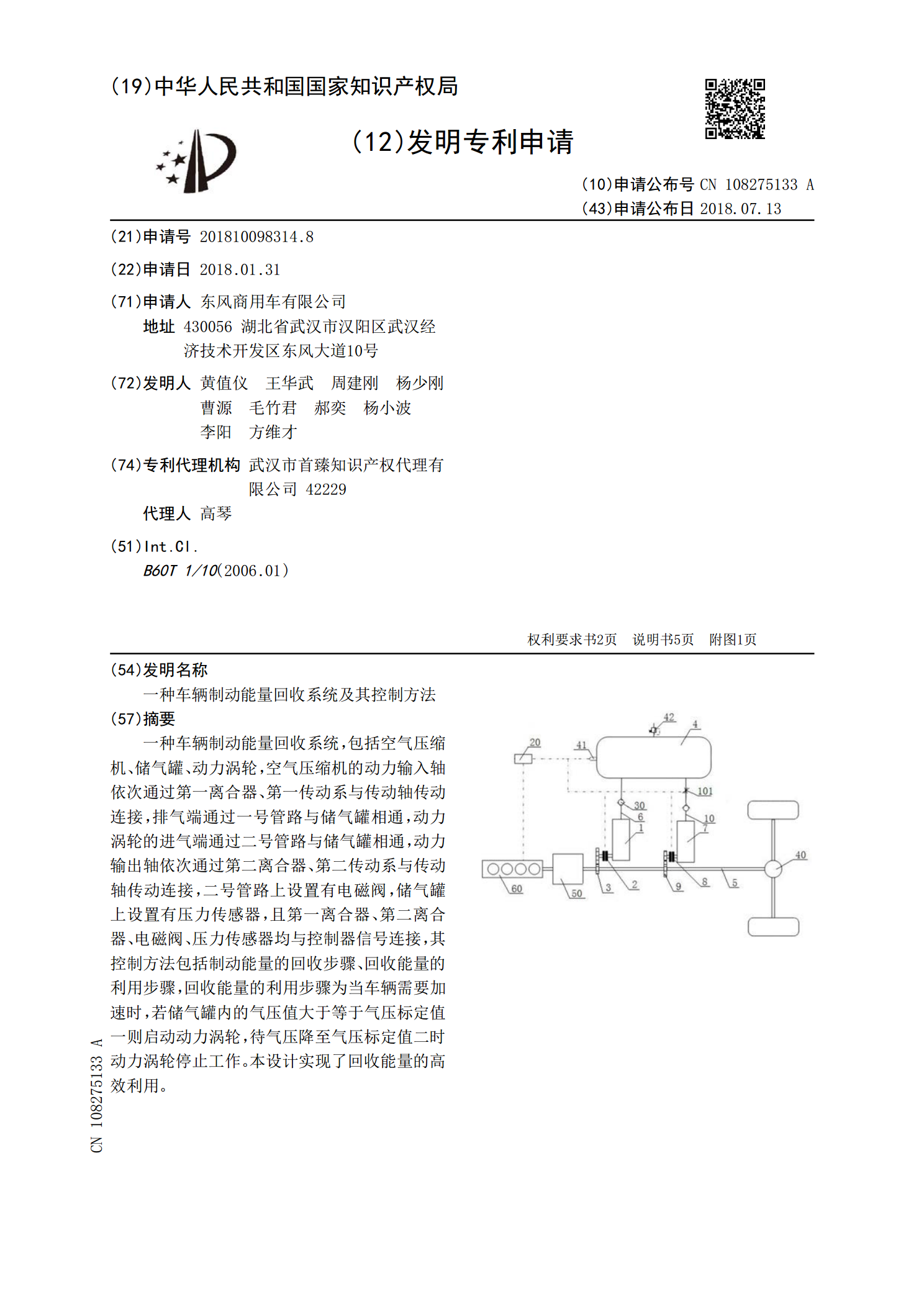
一种车辆制动能量回收系统及其控制方法.pdf
一种车辆制动能量回收系统,包括空气压缩机、储气罐、动力涡轮,空气压缩机的动力输入轴依次通过第一离合器、第一传动系与传动轴传动连接,排气端通过一号管路与储气罐相通,动力涡轮的进气端通过二号管路与储气罐相通,动力输出轴依次通过第二离合器、第二传动系与传动轴传动连接,二号管路上设置有电磁阀,储气罐上设置有压力传感器,且第一离合器、第二离合器、电磁阀、压力传感器均与控制器信号连接,其控制方法包括制动能量的回收步骤、回收能量的利用步骤,回收能量的利用步骤为当车辆需要加速时,若储气罐内的气压值大于等于气压标定值一则启