
一种输电线路高空巡线智能巡检机器人及巡检方法.pdf

是来****文章

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种输电线路高空巡线智能巡检机器人及巡检方法.pdf
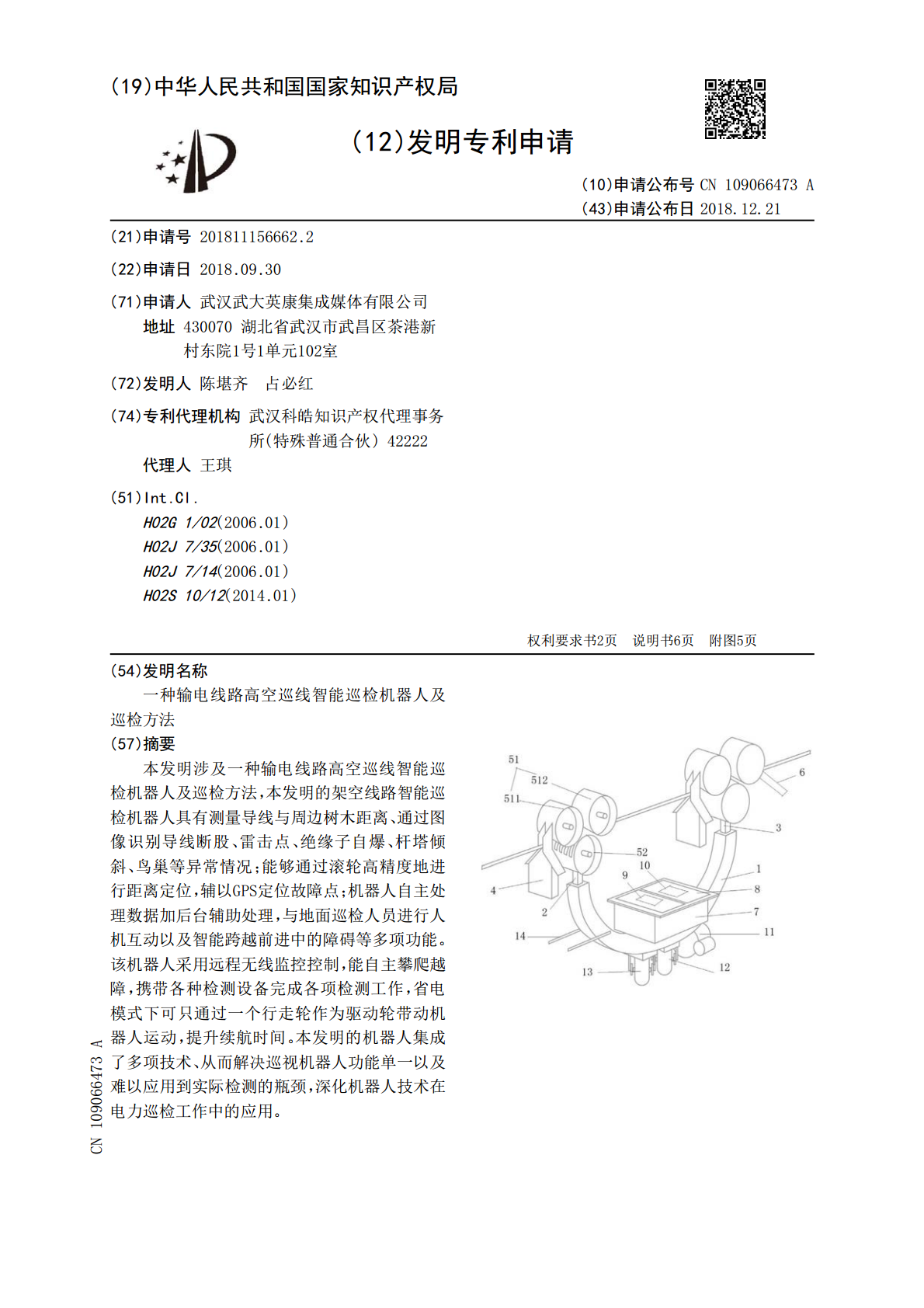
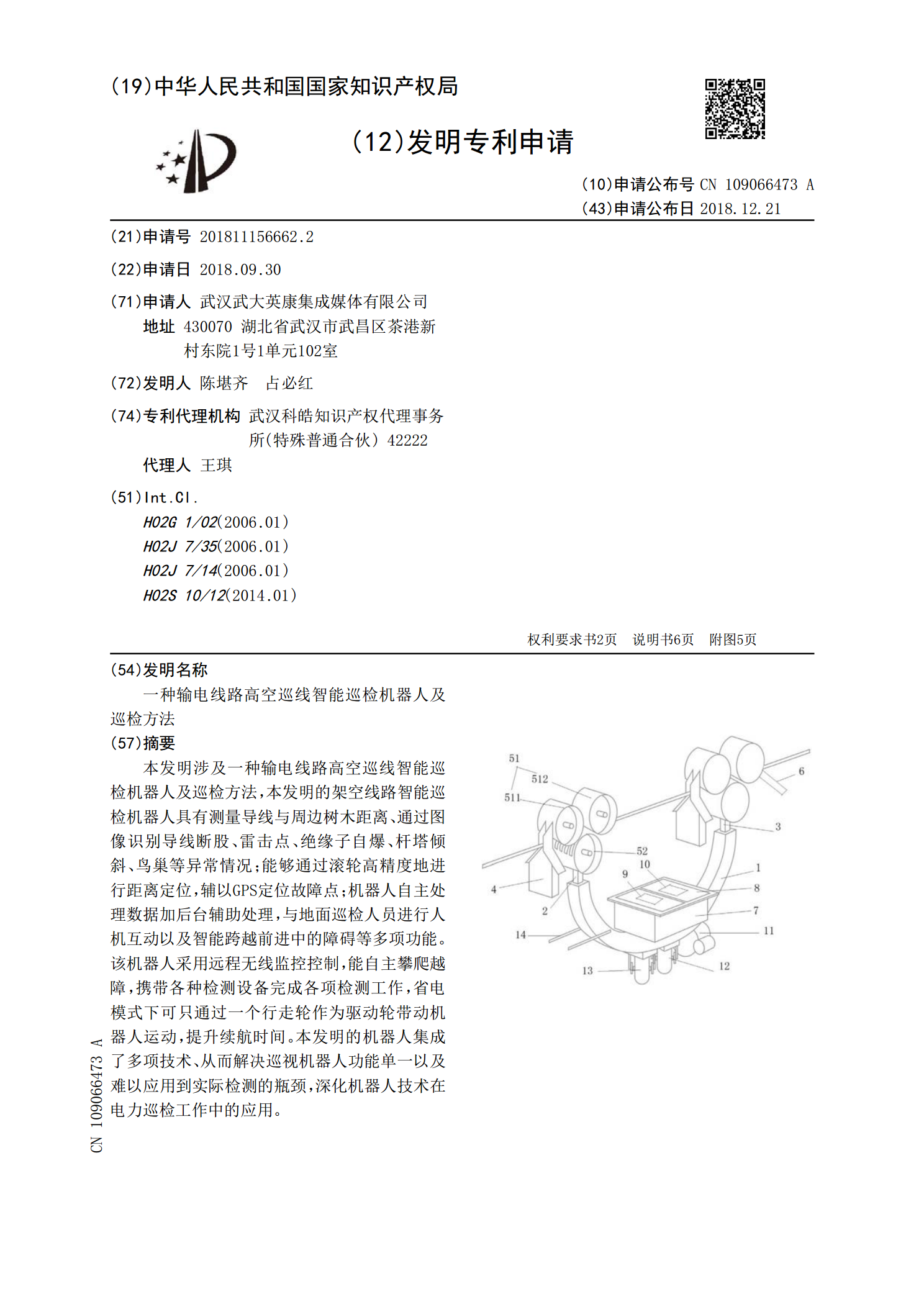
本发明涉及一种输电线路高空巡线智能巡检机器人及巡检方法,本发明的架空线路智能巡检机器人具有测量导线与周边树木距离、通过图像识别导线断股、雷击点、绝缘子自爆、杆塔倾斜、鸟巢等异常情况;能够通过滚轮高精度地进行距离定位,辅以GPS定位故障点;机器人自主处理数据加后台辅助处理,与地面巡检人员进行人机互动以及智能跨越前进中的障碍等多项功能。该机器人采用远程无线监控控制,能自主攀爬越障,携带各种检测设备完成各项检测工作,省电模式下可只通过一个行走轮作为驱动轮带动机器人运动,提升续航时间。本发明的机器人集成了多项技术

输电线路智能巡检机器人.pdf
本发明提供一种输电线路智能巡检机器人,包括:控制箱体、摄像头、曲臂和行走装置;摄像头设置在控制箱体的底部,用于采集输电线路的图像;曲臂的一端与控制箱体固定连接,另一端与行走装置连接;行走装置中,第一行走轮和第二行走轮设置在驱动轮轴上,第一行走轮用于在输电线路上行走;第二行走轮分别设置在第一行走轮的两侧,用于在设置于输电线路上的避障桥上行走;驱动电机与驱动轮轴连接,通过驱动轮轴带动第一行走轮和第二行走轮转动。控制箱体内设置有中央控制模块,中央控制模块用于控制行走装置和摄像头。本发明实现了巡检机器人在输电线路

一种输电线路的巡检方法及巡检系统.pdf
一种输电线路的巡检方法及巡检系统,在上电后自启动,包括自行走单元、用于检测自行走单元滑行的速度的速度检测单元、数据采集单元、GPS定位单元、用于对GPS定位单元在失效时间段内进行计时的时间获取单元、用于在GPS定位单元失效时间段内,根据速度在时间上的积分、GPS定位单元失效时的位置信息以及GPS定位单元恢复正常时的位置信息计算得到所述巡检系统的位置信息的位置计算单元,其中积分所需的时间为从时间获取单元得到。通过在巡检装置上安装一GPS定位单元以及位置计算单元,非别在GPS定位单元正常工作时间段内和GPS定

智能巡检机器人及巡检方法.pdf
本发明公开了智能巡检机器人及巡检方法,其中智能巡检机器人,由机器人本体及移动平台、定位导航装置、自动整平装置、测量仪器、图像采集装置、通信装置,内置服务器组成。本发明中,机器人通过定位导航装置按预设路线进行巡检,在预定的不同检测位置停留作业,自整平装置为测量仪器提供严格水平的基础平台,机器人引导测量仪器对管隧道内的棱镜进行测量,并将检测数据进行存储和计算,给出沉降变形测量结果,同时可以给出渗漏水等病害的检测结果,整套装置可替代人工测量,解决管隧道的自动化检测难题、便捷方便、实用性强。

用于输电线路巡检机器人的动力臂和输电线路巡检机器人.pdf
本发明属于机器人技术领域,具体涉及一种用于输电线路巡检机器人的动力臂和输电线路巡检机器人,旨在解决现有技术中巡检机器人越障动作复杂、越障效率低的问题。本发明提供一种输电线路巡检机器人包括至少两个动力臂,所述动力臂包括抱线模块和巡线模块;所述巡线模块包括依次连接的弹性压紧机构、爬行轮和叶轮机构,所述爬行轮与所述叶轮机构相互独立,所述爬行轮用于在输电线路上行走,遇到障碍物时,所述叶轮机构与所述弹性压紧机构构成被动柔顺式越障装置,分别实现支撑所述爬行轮位于输电线上方和所述爬行轮不脱离障碍物表面的功能,相互配合完