
用于输电线路巡检机器人的动力臂和输电线路巡检机器人.pdf

雨巷****凝海

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于输电线路巡检机器人的动力臂和输电线路巡检机器人.pdf
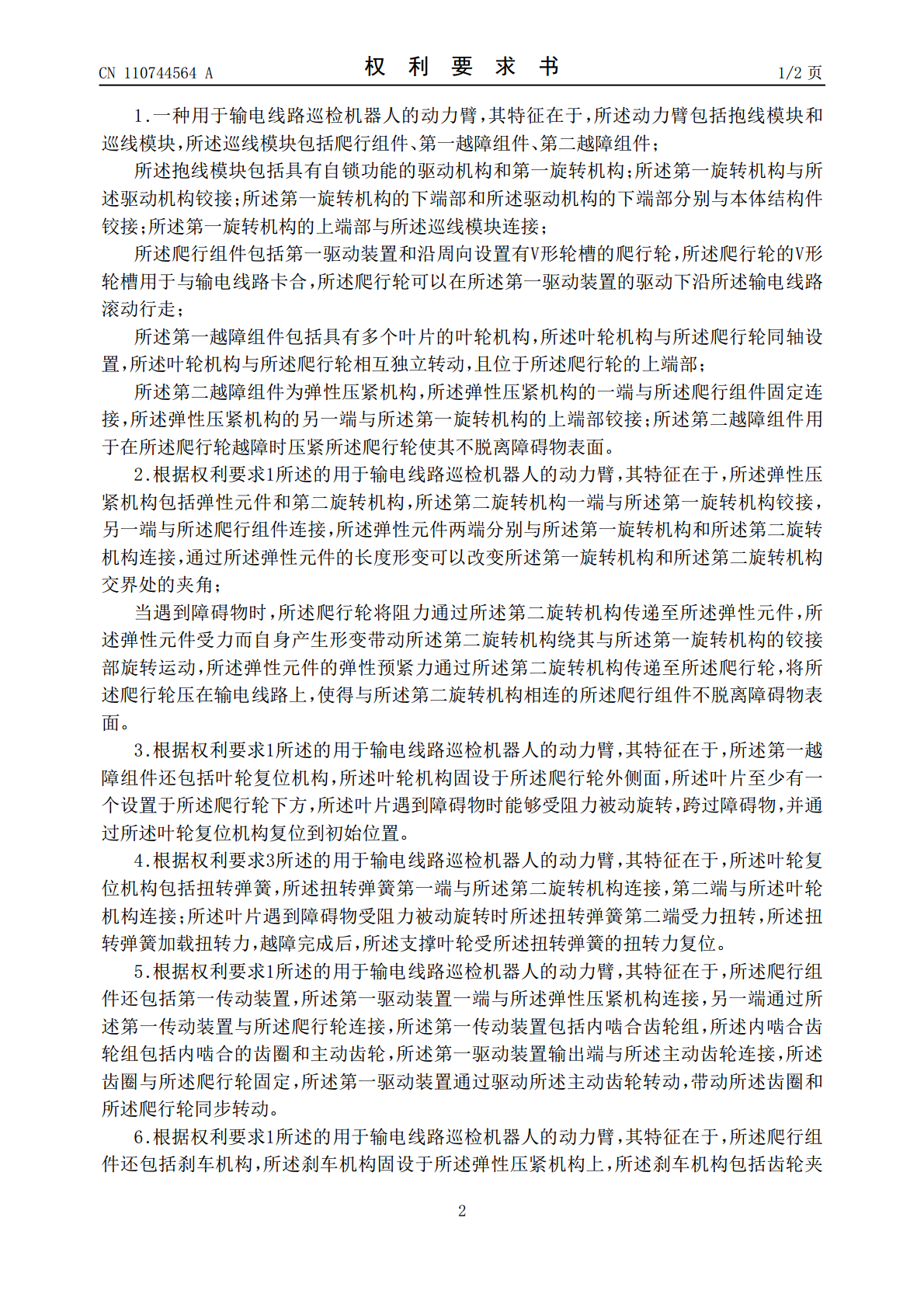
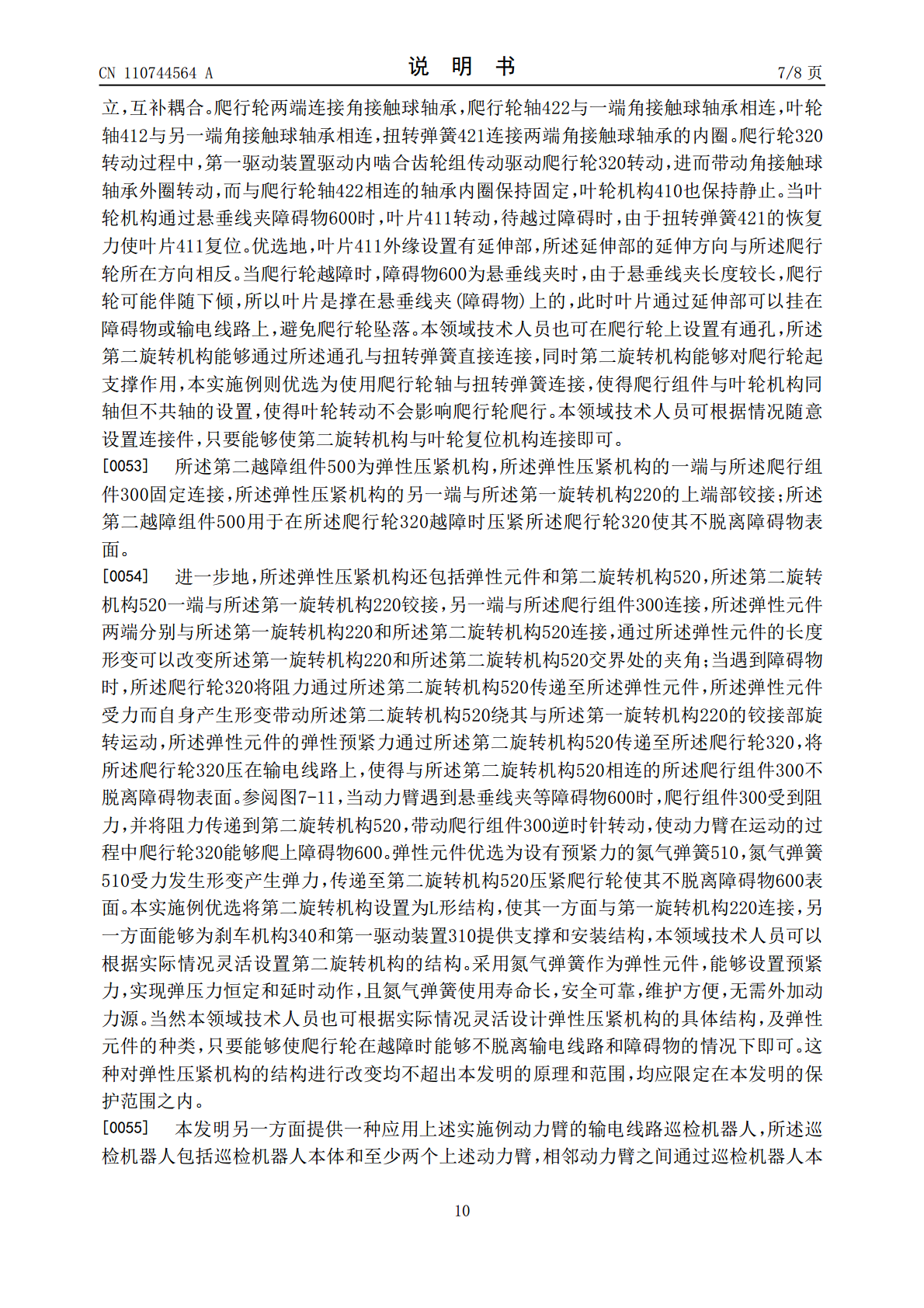
本发明属于机器人技术领域,具体涉及一种用于输电线路巡检机器人的动力臂和输电线路巡检机器人,旨在解决现有技术中巡检机器人越障动作复杂、越障效率低的问题。本发明提供一种输电线路巡检机器人包括至少两个动力臂,所述动力臂包括抱线模块和巡线模块;所述巡线模块包括依次连接的弹性压紧机构、爬行轮和叶轮机构,所述爬行轮与所述叶轮机构相互独立,所述爬行轮用于在输电线路上行走,遇到障碍物时,所述叶轮机构与所述弹性压紧机构构成被动柔顺式越障装置,分别实现支撑所述爬行轮位于输电线上方和所述爬行轮不脱离障碍物表面的功能,相互配合完
输电线路监测方法及用于检测输电线路的巡检机器人.pdf
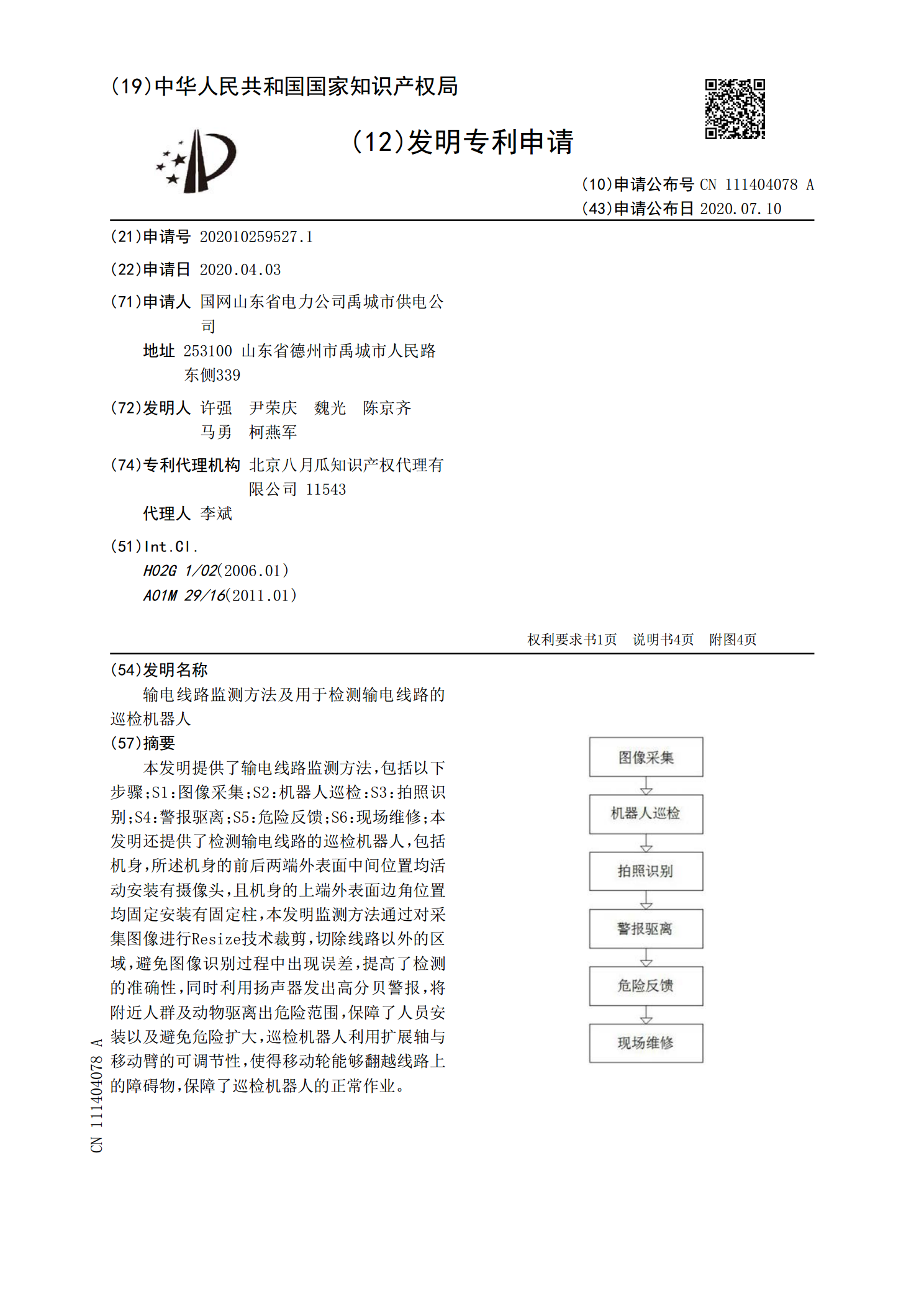
本发明提供了输电线路监测方法,包括以下步骤;S1:图像采集;S2:机器人巡检:S3:拍照识别;S4:警报驱离;S5:危险反馈;S6:现场维修;本发明还提供了检测输电线路的巡检机器人,包括机身,所述机身的前后两端外表面中间位置均活动安装有摄像头,且机身的上端外表面边角位置均固定安装有固定柱,本发明监测方法通过对采集图像进行Resize技术裁剪,切除线路以外的区域,避免图像识别过程中出现误差,提高了检测的准确性,同时利用扬声器发出高分贝警报,将附近人群及动物驱离出危险范围,保障了人员安装以及避免危险扩大,巡检

输电线路智能巡检机器人.pdf
本发明提供一种输电线路智能巡检机器人,包括:控制箱体、摄像头、曲臂和行走装置;摄像头设置在控制箱体的底部,用于采集输电线路的图像;曲臂的一端与控制箱体固定连接,另一端与行走装置连接;行走装置中,第一行走轮和第二行走轮设置在驱动轮轴上,第一行走轮用于在输电线路上行走;第二行走轮分别设置在第一行走轮的两侧,用于在设置于输电线路上的避障桥上行走;驱动电机与驱动轮轴连接,通过驱动轮轴带动第一行走轮和第二行走轮转动。控制箱体内设置有中央控制模块,中央控制模块用于控制行走装置和摄像头。本发明实现了巡检机器人在输电线路
一种用于架空高压输电线路巡检的机器人.pdf
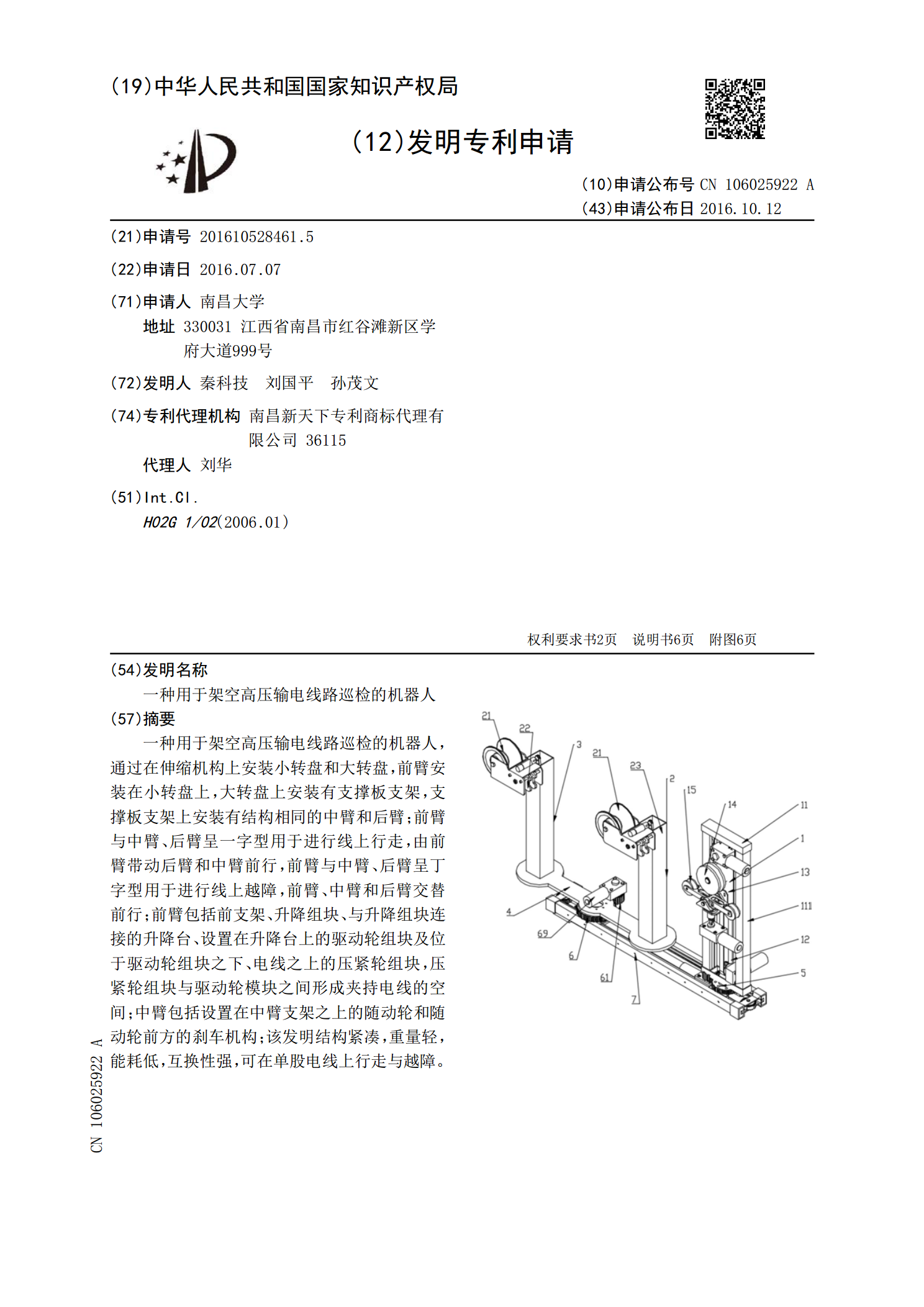
一种用于架空高压输电线路巡检的机器人,通过在伸缩机构上安装小转盘和大转盘,前臂安装在小转盘上,大转盘上安装有支撑板支架,支撑板支架上安装有结构相同的中臂和后臂;前臂与中臂、后臂呈一字型用于进行线上行走,由前臂带动后臂和中臂前行,前臂与中臂、后臂呈丁字型用于进行线上越障,前臂、中臂和后臂交替前行;前臂包括前支架、升降组块、与升降组块连接的升降台、设置在升降台上的驱动轮组块及位于驱动轮组块之下、电线之上的压紧轮组块,压紧轮组块与驱动轮模块之间形成夹持电线的空间;中臂包括设置在中臂支架之上的随动轮和随动轮前方的

架空输电线路巡检机器人发展研究.pptx
,目录PartOnePartTwo定义与功能机器人类型与特点机器人应用场景PartThree技术起源与背景技术发展阶段技术发展趋势PartFour机器人本体设计传感器技术导航与定位技术机器学习与人工智能技术PartFive应用现状概述典型应用案例分析现有问题与挑战PartSix技术创新方向市场发展前景对行业的推动作用社会经济效益分析THANKS