
一种方便安装的机械臂.pdf

St****36

1/8
2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种方便安装的机械臂.pdf
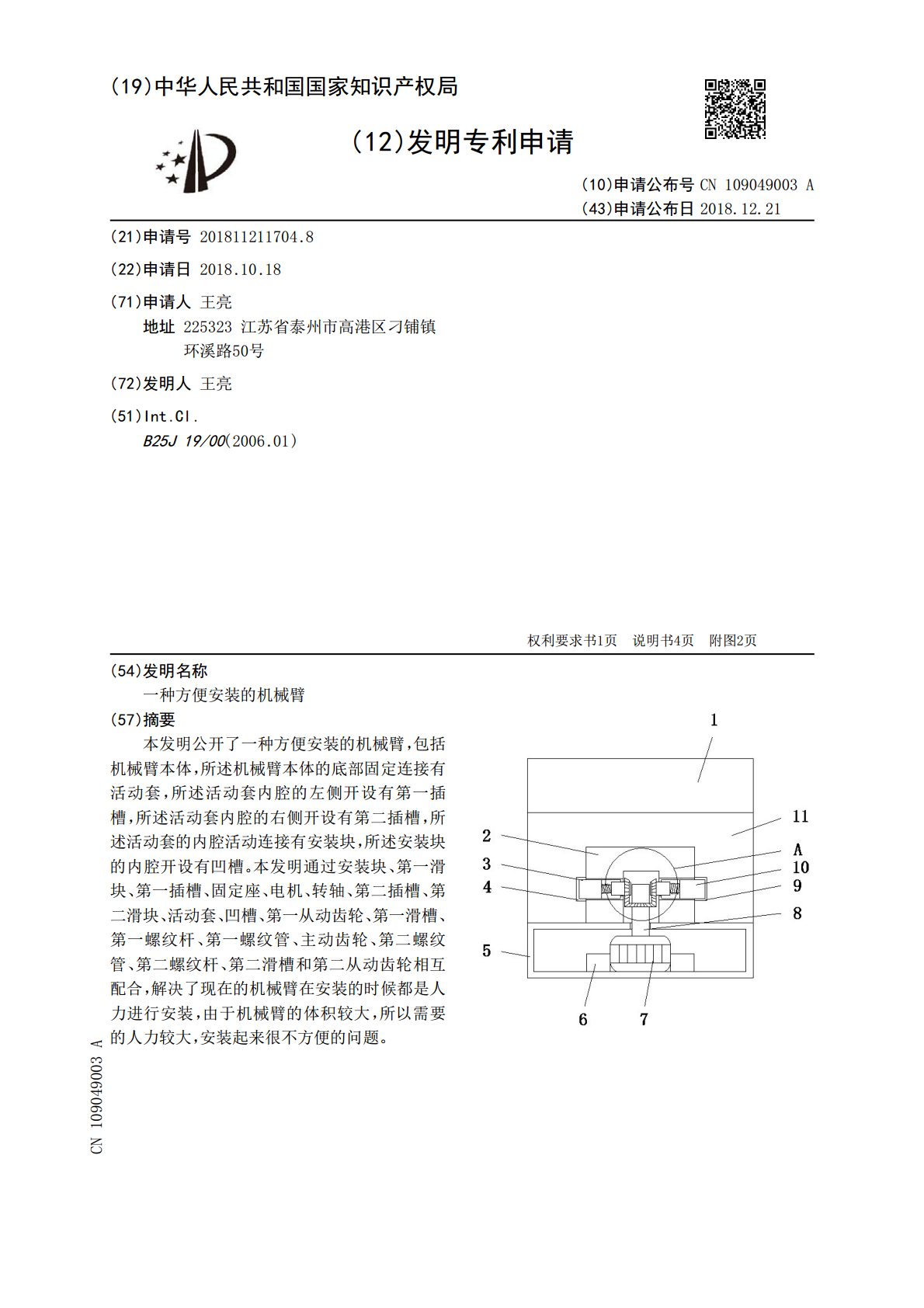
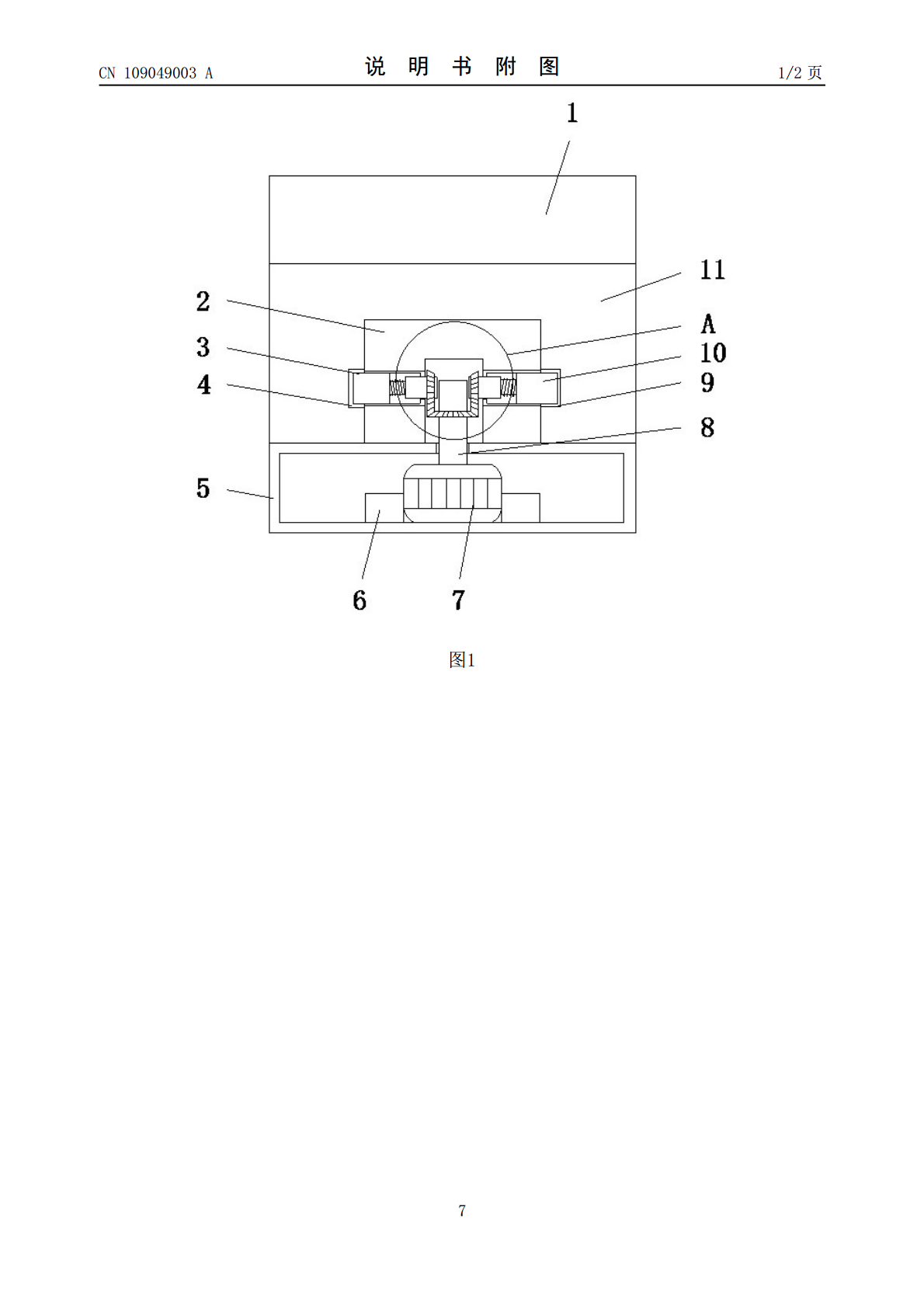
本发明公开了一种方便安装的机械臂,包括机械臂本体,所述机械臂本体的底部固定连接有活动套,所述活动套内腔的左侧开设有第一插槽,所述活动套内腔的右侧开设有第二插槽,所述活动套的内腔活动连接有安装块,所述安装块的内腔开设有凹槽。本发明通过安装块、第一滑块、第一插槽、固定座、电机、转轴、第二插槽、第二滑块、活动套、凹槽、第一从动齿轮、第一滑槽、第一螺纹杆、第一螺纹管、主动齿轮、第二螺纹管、第二螺纹杆、第二滑槽和第二从动齿轮相互配合,解决了现在的机械臂在安装的时候都是人力进行安装,由于机械臂的体积较大,所以需要的人
一种方便拆卸的组装式机械臂.pdf
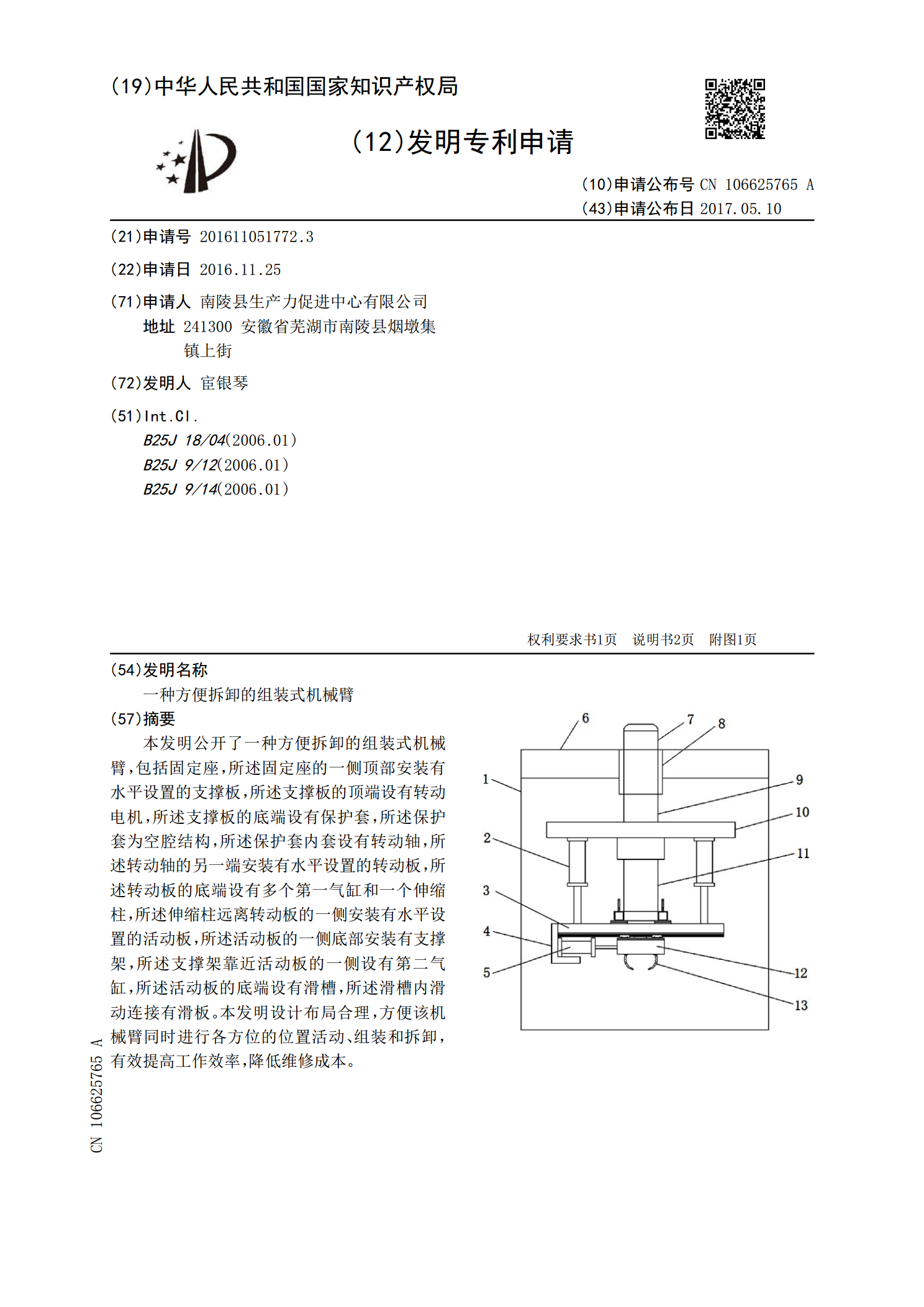
本发明公开了一种方便拆卸的组装式机械臂,包括固定座,所述固定座的一侧顶部安装有水平设置的支撑板,所述支撑板的顶端设有转动电机,所述支撑板的底端设有保护套,所述保护套为空腔结构,所述保护套内套设有转动轴,所述转动轴的另一端安装有水平设置的转动板,所述转动板的底端设有多个第一气缸和一个伸缩柱,所述伸缩柱远离转动板的一侧安装有水平设置的活动板,所述活动板的一侧底部安装有支撑架,所述支撑架靠近活动板的一侧设有第二气缸,所述活动板的底端设有滑槽,所述滑槽内滑动连接有滑板。本发明设计布局合理,方便该机械臂同时进行各方

一种电气安装用机械臂.pdf
本发明涉及机械手领域,具体涉及一种电气安装用机械臂。夹持板竖直设置,且沿夹持块的横杆长度方向滑动设置。锁止杆滑动地设置在滑动腔内,每个夹持弹簧的一端与夹持板固接,每个触发杆滑动地插装在一个贯穿孔内,且可与一个棘齿块啮合,以在触发杆和棘齿块啮合时,棘齿块限制触发杆向远离连接板轴心的一侧移动;推挤板初始状态与锁止杆接触,用于阻挡锁止杆向触发杆方向滑动,进而使棘齿块和触发杆未啮合,多个压缩弹簧设置在夹持板和夹持块之间,压缩弹簧的一端与夹持块连接,多个夹持组件上的触发杆对被夹持物有包裹的效果,从而防止被夹持物体的
一种安装于轮椅上的机械臂.pdf
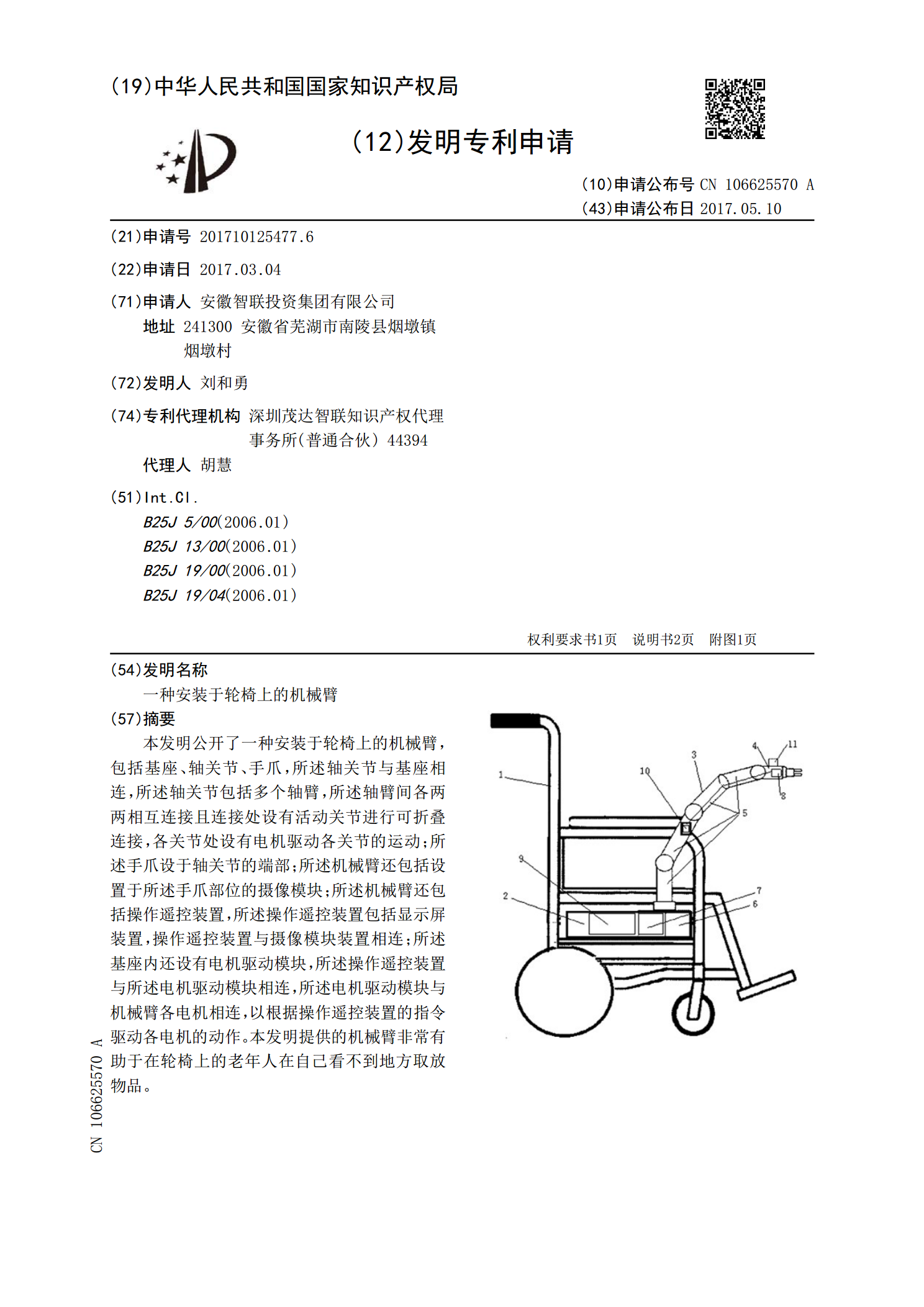
本发明公开了一种安装于轮椅上的机械臂,包括基座、轴关节、手爪,所述轴关节与基座相连,所述轴关节包括多个轴臂,所述轴臂间各两两相互连接且连接处设有活动关节进行可折叠连接,各关节处设有电机驱动各关节的运动;所述手爪设于轴关节的端部;所述机械臂还包括设置于所述手爪部位的摄像模块;所述机械臂还包括操作遥控装置,所述操作遥控装置包括显示屏装置,操作遥控装置与摄像模块装置相连;所述基座内还设有电机驱动模块,所述操作遥控装置与所述电机驱动模块相连,所述电机驱动模块与机械臂各电机相连,以根据操作遥控装置的指令驱动各电机的

一种便于安装的机床机械臂.pdf
本发明公开了一种便于安装的机床机械臂,包括底座,所述底座的顶端分别固定有固定板、挡板和两组支撑轴,所述支撑轴均位于固定板和挡板之间,所述支撑轴的顶端均转动连接有齿轮,两组所述齿轮相远离的一侧均设置有第一齿条,所述齿轮之间设置有两组第二齿条,所述齿轮均与第一齿条和第二齿条相啮合,所述第一齿条的两侧均固定有第一导向杆,其中一组所述第一导向杆贯穿固定板,另一组所述第一导向杆贯穿挡板并固定有第一夹板,所述第二齿条的两侧均固定有第二导向杆。本发明设计巧妙,结构合理,操作简单,方便对不同型号的安装座进行安装或者拆卸,