
一种机器人传动行走轮.pdf

一吃****昕靓


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人传动行走轮.pdf
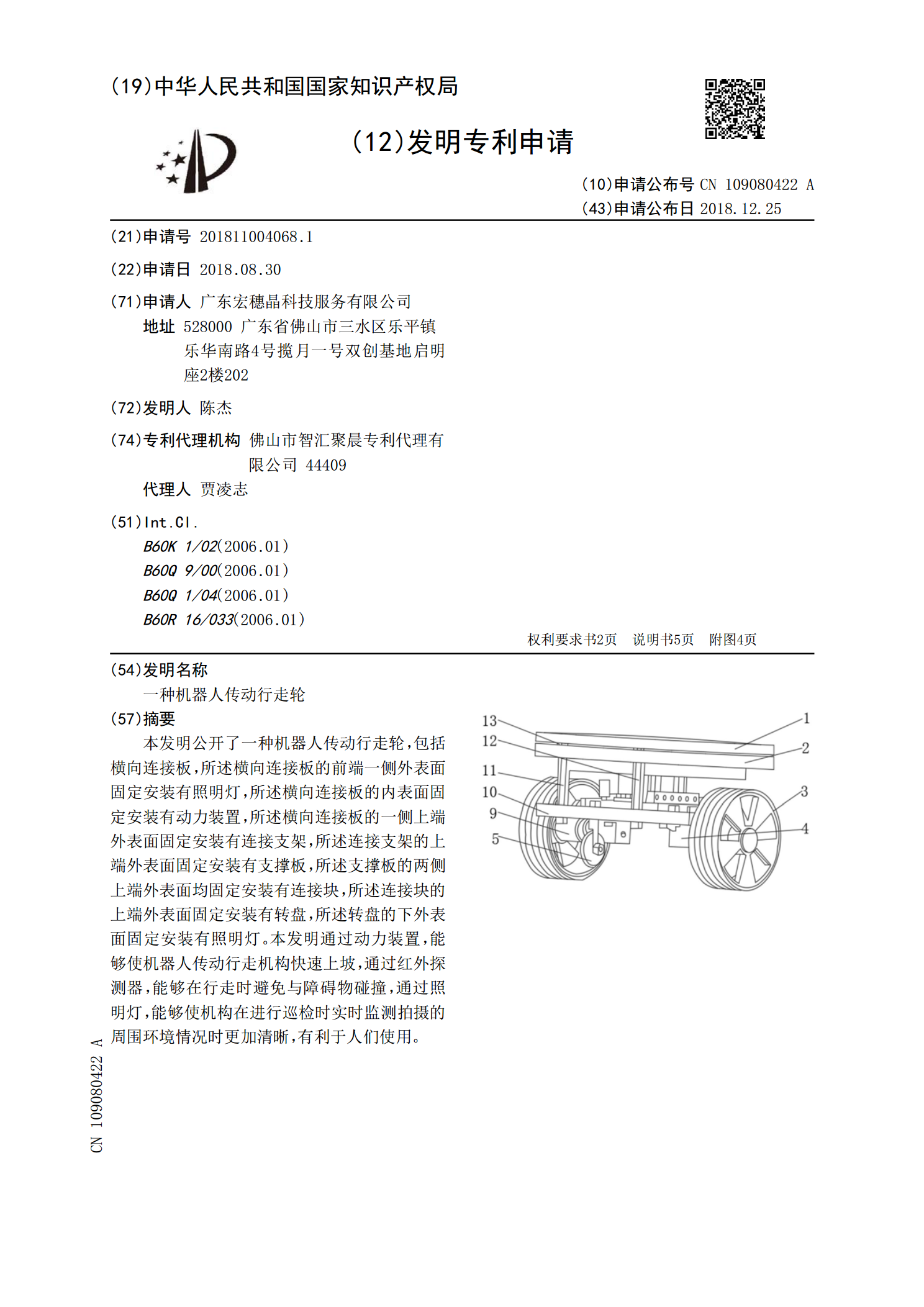
本发明公开了一种机器人传动行走轮,包括横向连接板,所述横向连接板的前端一侧外表面固定安装有照明灯,所述横向连接板的内表面固定安装有动力装置,所述横向连接板的一侧上端外表面固定安装有连接支架,所述连接支架的上端外表面固定安装有支撑板,所述支撑板的两侧上端外表面均固定安装有连接块,所述连接块的上端外表面固定安装有转盘,所述转盘的下外表面固定安装有照明灯。本发明通过动力装置,能够使机器人传动行走机构快速上坡,通过红外探测器,能够在行走时避免与障碍物碰撞,通过照明灯,能够使机构在进行巡检时实时监测拍摄的周围环境情

一种用于机器人的行走轮.pdf
本发明公开了一种用于机器人的行走轮,包括:左轮盘,为圆盘形结构,四周的外壁为光面;右轮盘,与左轮盘的尺寸一致,四周的外壁也为光面;中心轮盘,安装于左轮盘和右轮盘之间,包括位于中心的圆盘和多个布置于圆盘四周的防滑块,防滑块为弧形结构,外表面设置有防滑纹路,圆盘与各防滑块之间安装有联动机构,当圆盘转动时会通过联动机构驱使各防滑块沿径向方向伸出或缩回,当防滑块伸出至极限位置时,各个防滑块形成一个直径与左轮盘或右轮盘直径一致或略大的圆环。本发明表面的摩擦系数可以切换,当防滑块缩回时,仅左右轮盘四周的光面与地面接触

一种巡检机器人的行走轮.pdf
本发明公开了一种巡检机器人的行走轮,包括有空心的支撑轴心、位于支撑轴心外的摩擦轮、位于摩擦轮外的外侧轮,支承轴心、摩擦轮及外侧轮均由对称布置的左右两半构成,左右对称的摩擦轮及外侧轮两半之间形成一个用于容纳导线的弧形或V形凹槽,还包括有一导电环,所述的导电环的内圈嵌入到支撑轴心,导电环的外圈构成凹槽的槽底,还包括有两个的外侧支撑件。本发明行走轮采用柔性设计,增加随动性,在行走轮通过障碍物时,外部行走轮片会随障碍物宽度张开一定的位移量,从而降低了行走轮随障碍物抬升的高度,降低了颠簸程度。

一种教育机器人用的行走轮.pdf
本发明属于机器人技术领域,具体为一种教育机器人用的行走轮,包括支撑板,所述支撑板的底端对称固定有两个立柱,两个所述立柱的底端固定连接有固定板,所述立柱上滑动插设有插杆,两个所述插杆相对的一端固定有第一连接块,两个所述插杆相互远离的一端固定有第二连接块,两个所述立柱之间设有伸缩装置的,所述伸缩装置的的底端固定连接有连接杆,所述连接杆的两侧均固定有联动块,所述联动块与第一连接块之间设有支杆。本发明,结构新颖,实现了机器人的重心可降低,增加高速运动时候的稳定性。
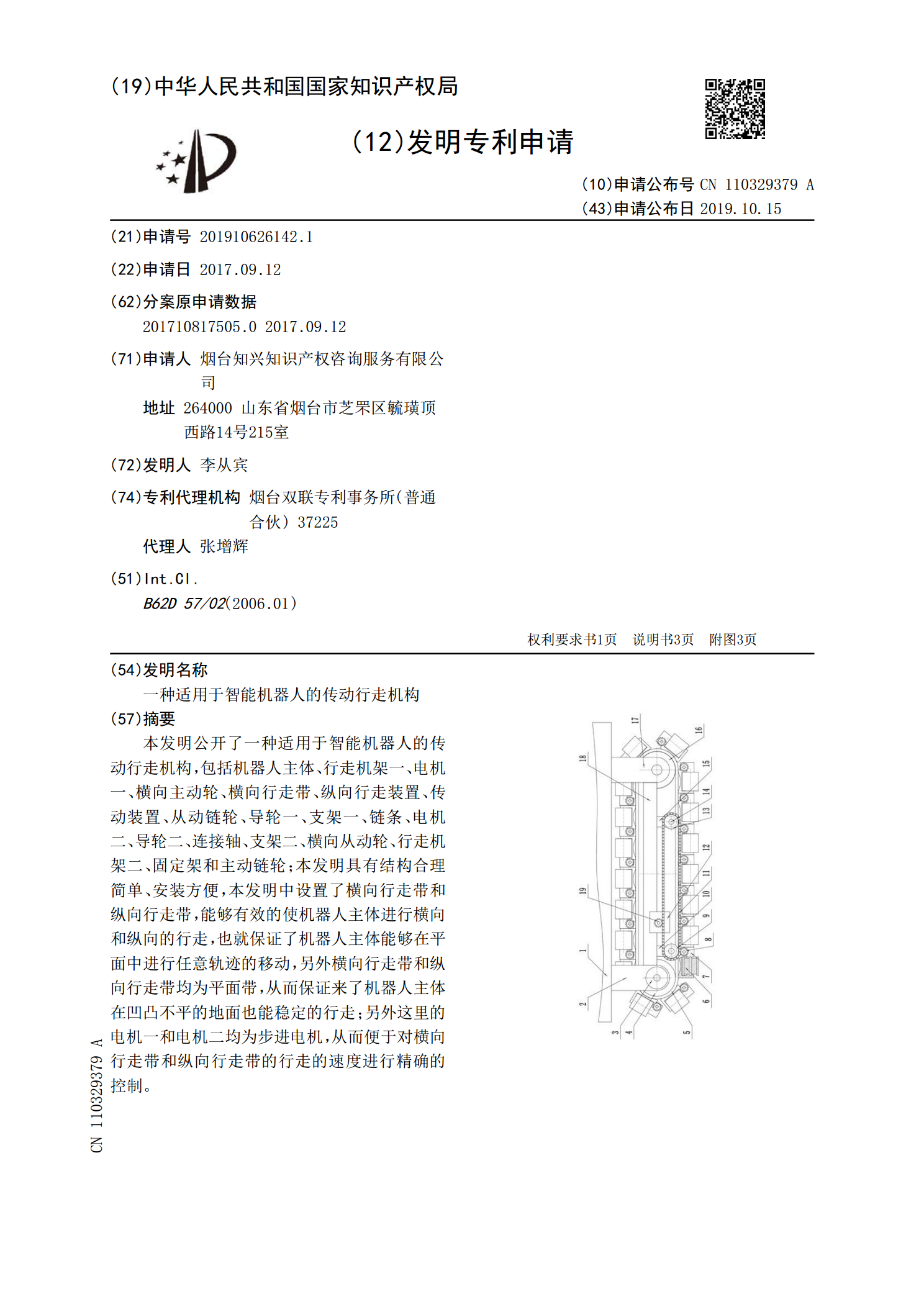
一种适用于智能机器人的传动行走机构.pdf
本发明公开了一种适用于智能机器人的传动行走机构,包括机器人主体、行走机架一、电机一、横向主动轮、横向行走带、纵向行走装置、传动装置、从动链轮、导轮一、支架一、链条、电机二、导轮二、连接轴、支架二、横向从动轮、行走机架二、固定架和主动链轮;本发明具有结构合理简单、安装方便,本发明中设置了横向行走带和纵向行走带,能够有效的使机器人主体进行横向和纵向的行走,也就保证了机器人主体能够在平面中进行任意轨迹的移动,另外横向行走带和纵向行走带均为平面带,从而保证来了机器人主体在凹凸不平的地面也能稳定的行走;另外这里的电