
图像众包标注方法和装置.pdf

绮兰****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像众包标注方法和装置.pdf
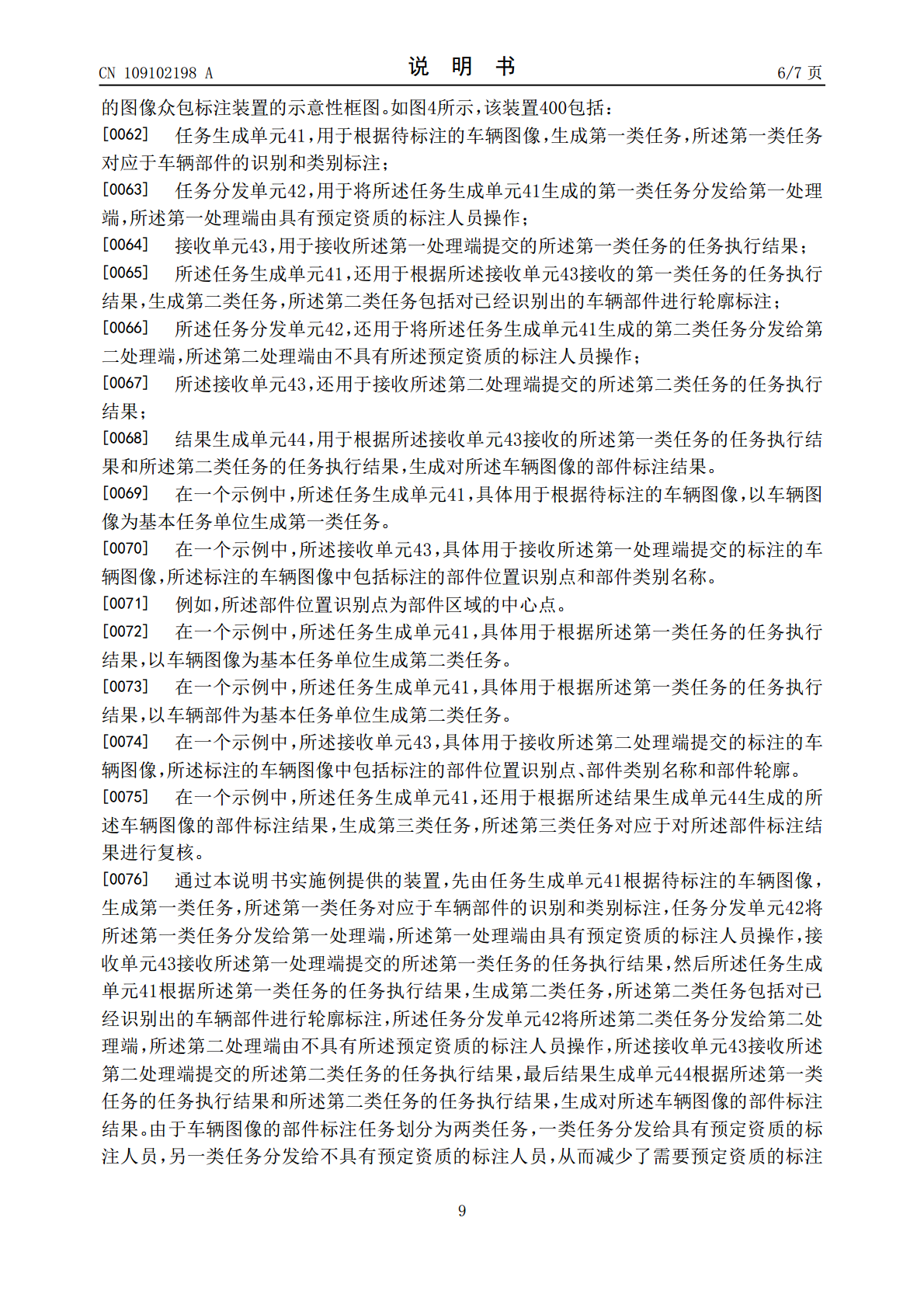
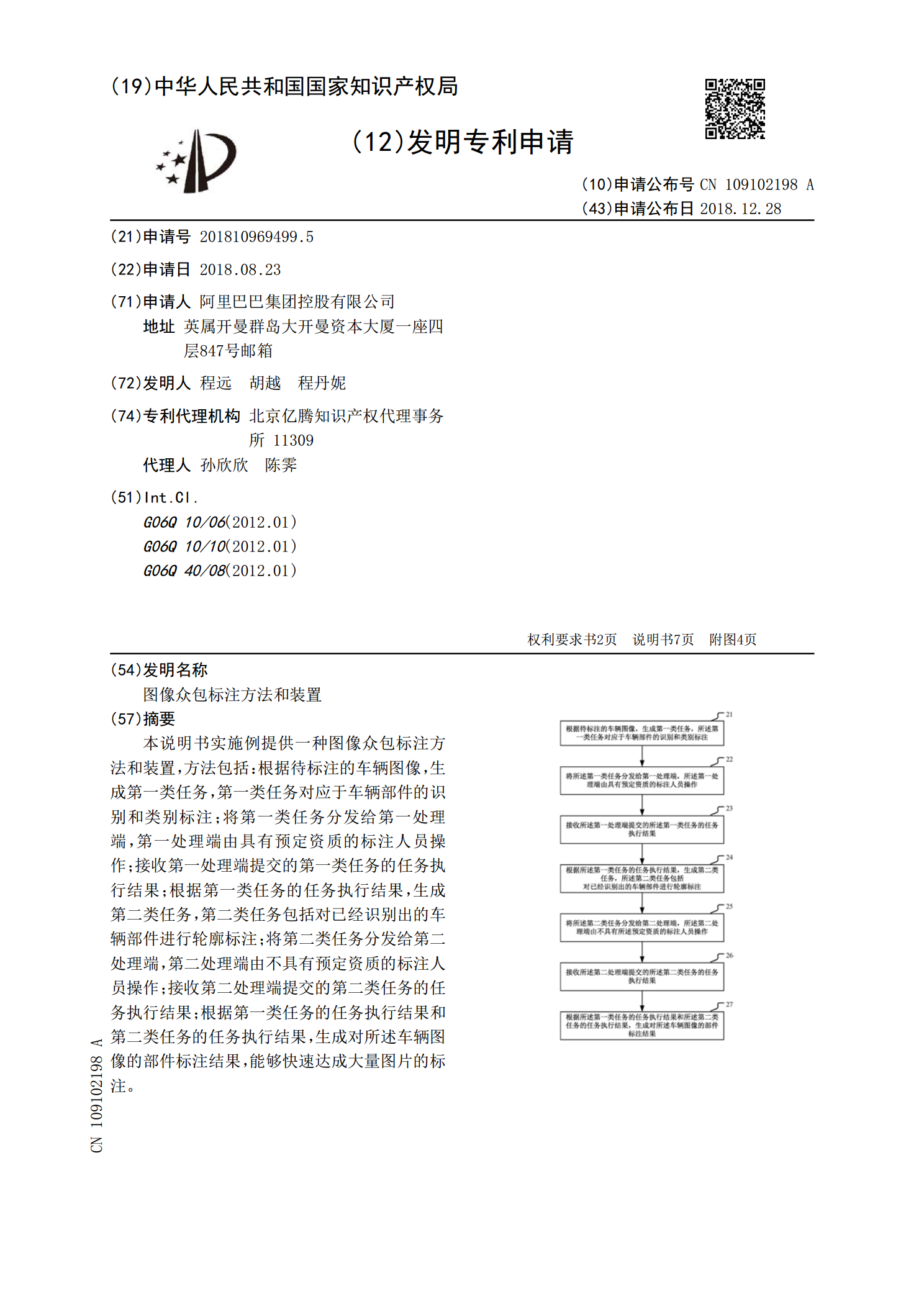
本说明书实施例提供一种图像众包标注方法和装置,方法包括:根据待标注的车辆图像,生成第一类任务,第一类任务对应于车辆部件的识别和类别标注;将第一类任务分发给第一处理端,第一处理端由具有预定资质的标注人员操作;接收第一处理端提交的第一类任务的任务执行结果;根据第一类任务的任务执行结果,生成第二类任务,第二类任务包括对已经识别出的车辆部件进行轮廓标注;将第二类任务分发给第二处理端,第二处理端由不具有预定资质的标注人员操作;接收第二处理端提交的第二类任务的任务执行结果;根据第一类任务的任务执行结果和第二类任务的任
图像标注方法和图像标注装置.pdf
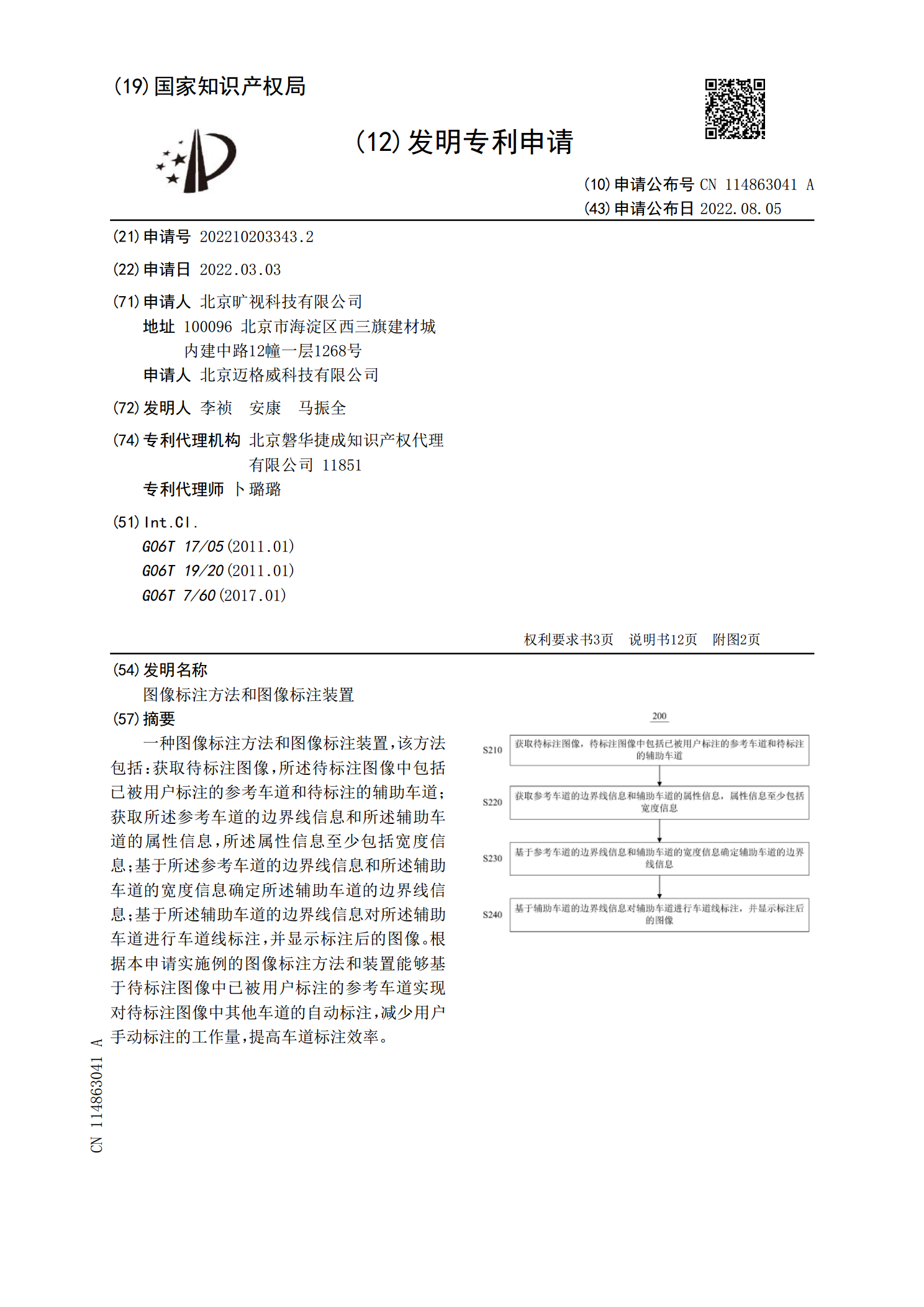
一种图像标注方法和图像标注装置,该方法包括:获取待标注图像,所述待标注图像中包括已被用户标注的参考车道和待标注的辅助车道;获取所述参考车道的边界线信息和所述辅助车道的属性信息,所述属性信息至少包括宽度信息;基于所述参考车道的边界线信息和所述辅助车道的宽度信息确定所述辅助车道的边界线信息;基于所述辅助车道的边界线信息对所述辅助车道进行车道线标注,并显示标注后的图像。根据本申请实施例的图像标注方法和装置能够基于待标注图像中已被用户标注的参考车道实现对待标注图像中其他车道的自动标注,减少用户手动标注的工作量,提
图像标注方法和装置.pdf
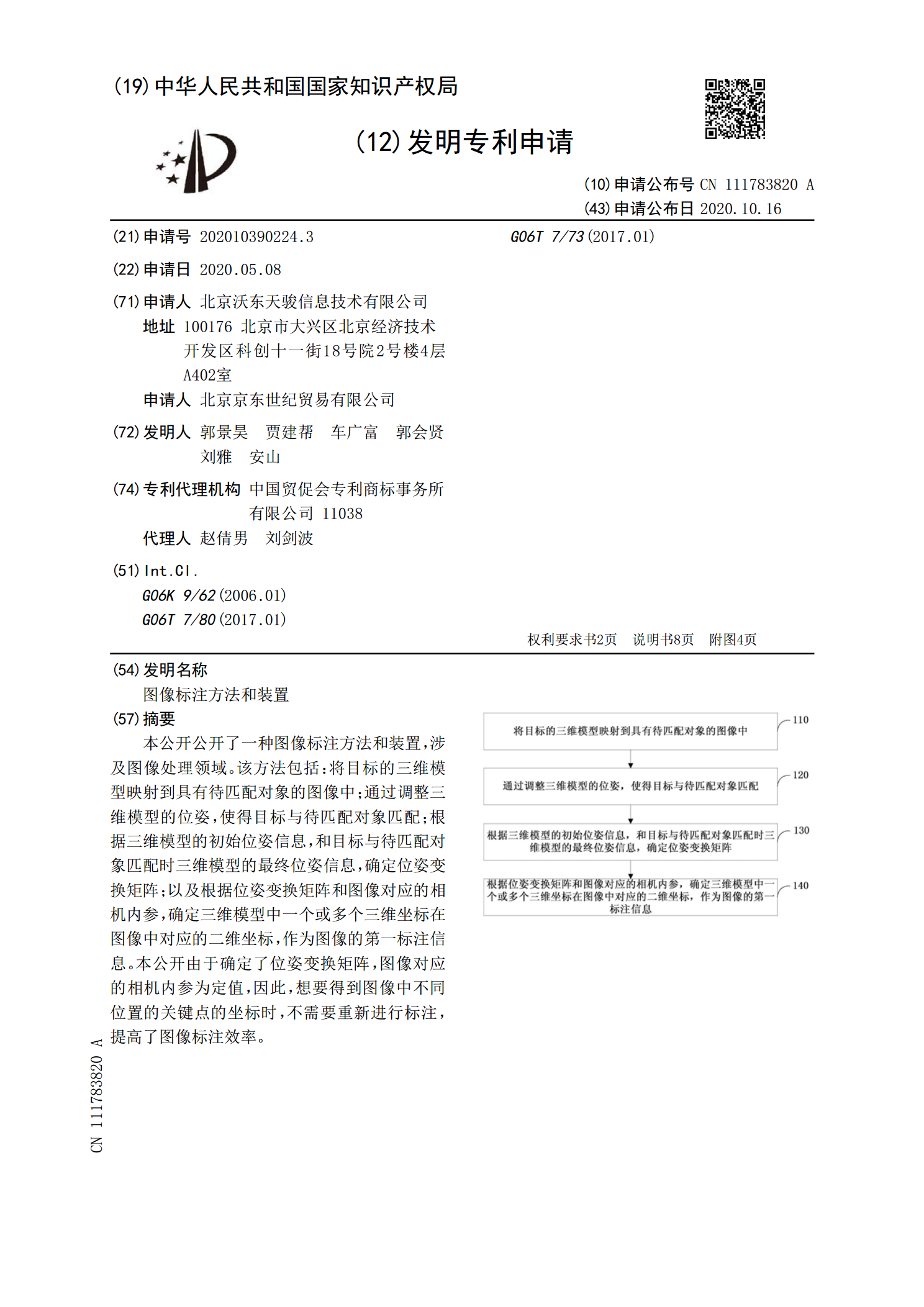
本公开公开了一种图像标注方法和装置,涉及图像处理领域。该方法包括:将目标的三维模型映射到具有待匹配对象的图像中;通过调整三维模型的位姿,使得目标与待匹配对象匹配;根据三维模型的初始位姿信息,和目标与待匹配对象匹配时三维模型的最终位姿信息,确定位姿变换矩阵;以及根据位姿变换矩阵和图像对应的相机内参,确定三维模型中一个或多个三维坐标在图像中对应的二维坐标,作为图像的第一标注信息。本公开由于确定了位姿变换矩阵,图像对应的相机内参为定值,因此,想要得到图像中不同位置的关键点的坐标时,不需要重新进行标注,提高了图像
图像标注模型的训练及图像标注的方法及装置.pdf
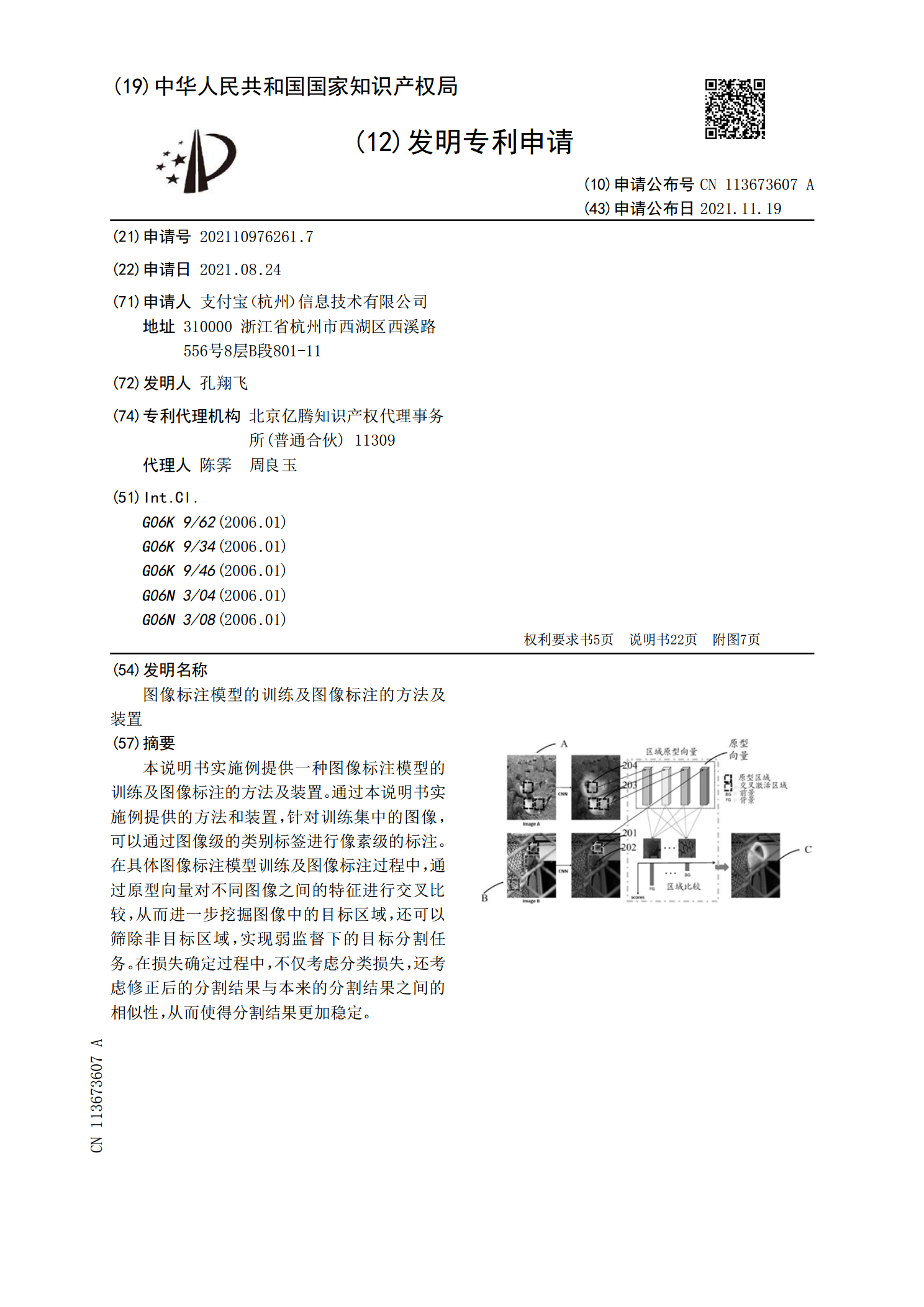
本说明书实施例提供一种图像标注模型的训练及图像标注的方法及装置。通过本说明书实施例提供的方法和装置,针对训练集中的图像,可以通过图像级的类别标签进行像素级的标注。在具体图像标注模型训练及图像标注过程中,通过原型向量对不同图像之间的特征进行交叉比较,从而进一步挖掘图像中的目标区域,还可以筛除非目标区域,实现弱监督下的目标分割任务。在损失确定过程中,不仅考虑分类损失,还考虑修正后的分割结果与本来的分割结果之间的相似性,从而使得分割结果更加稳定。

图像样本标注方法、装置、终端设备和图像标注系统.pdf
本申请公开了一种图像样本标注方法、装置、终端设备和图像标注系统。该方法基于第一摄像头和第二摄像头之间的位姿关系、目标对象的第n个关键点在第一图像中的第一像素坐标和所述第n个关键点在第二图像中的第二像素坐标计算所述第n个关键点在第一摄像头坐标系下的第一个三维坐标,所述第一图像和所述第二图像分别由所述第一摄像头和所述第二摄像头在同一时刻获取,1≤n≤N,N为待标注关键点的总数;利用所述第一个三维坐标对所述第一图像中的第n个关键点进行标注。本申请可以获得目标对象被遮挡部位绝对深度,解决深度相机无法获得目标对象被