
一种具备壁面过渡功能的爬壁机器人.pdf

安双****文章

1/10
2/10
3/10
4/10
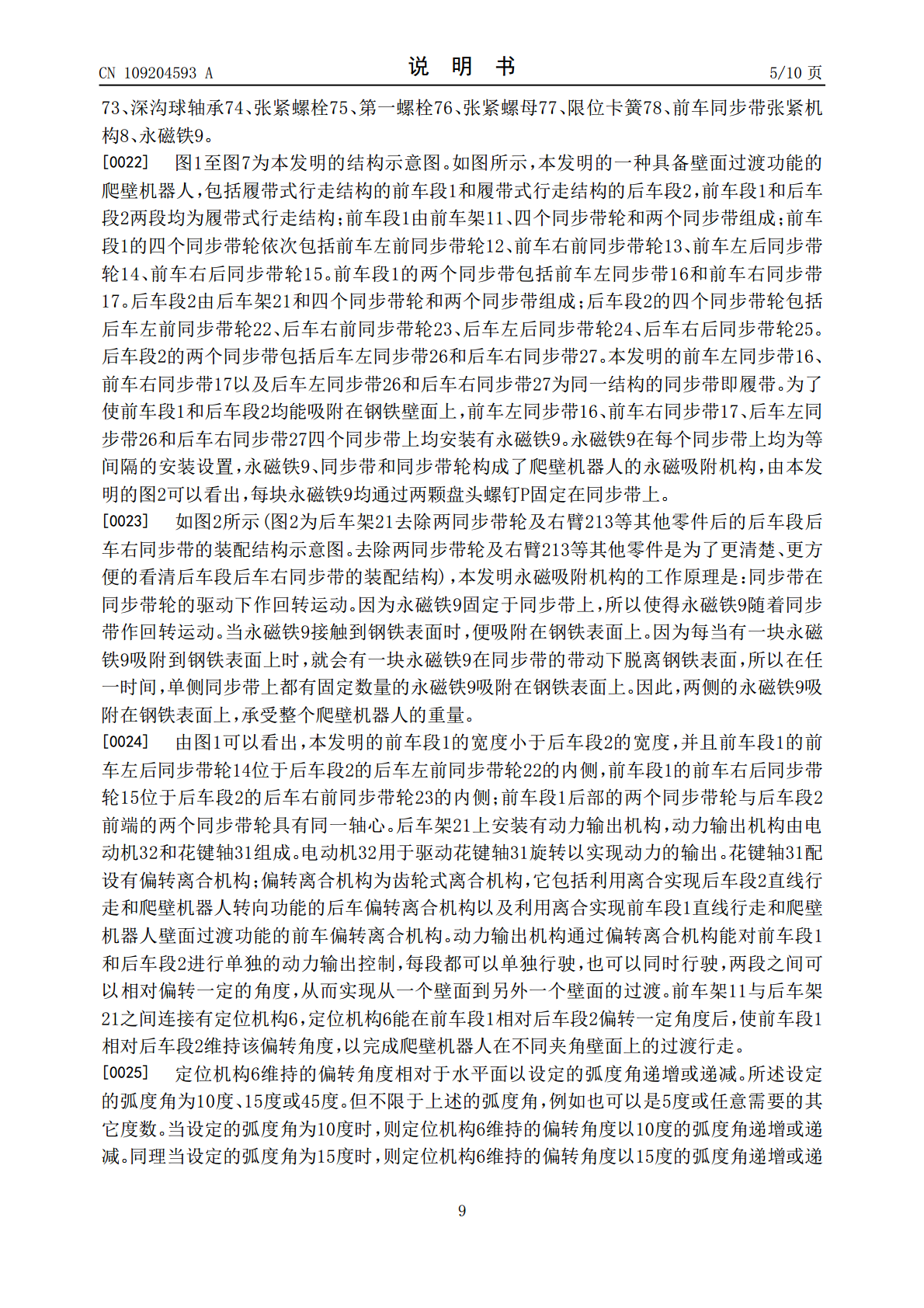
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具备壁面过渡功能的爬壁机器人.pdf
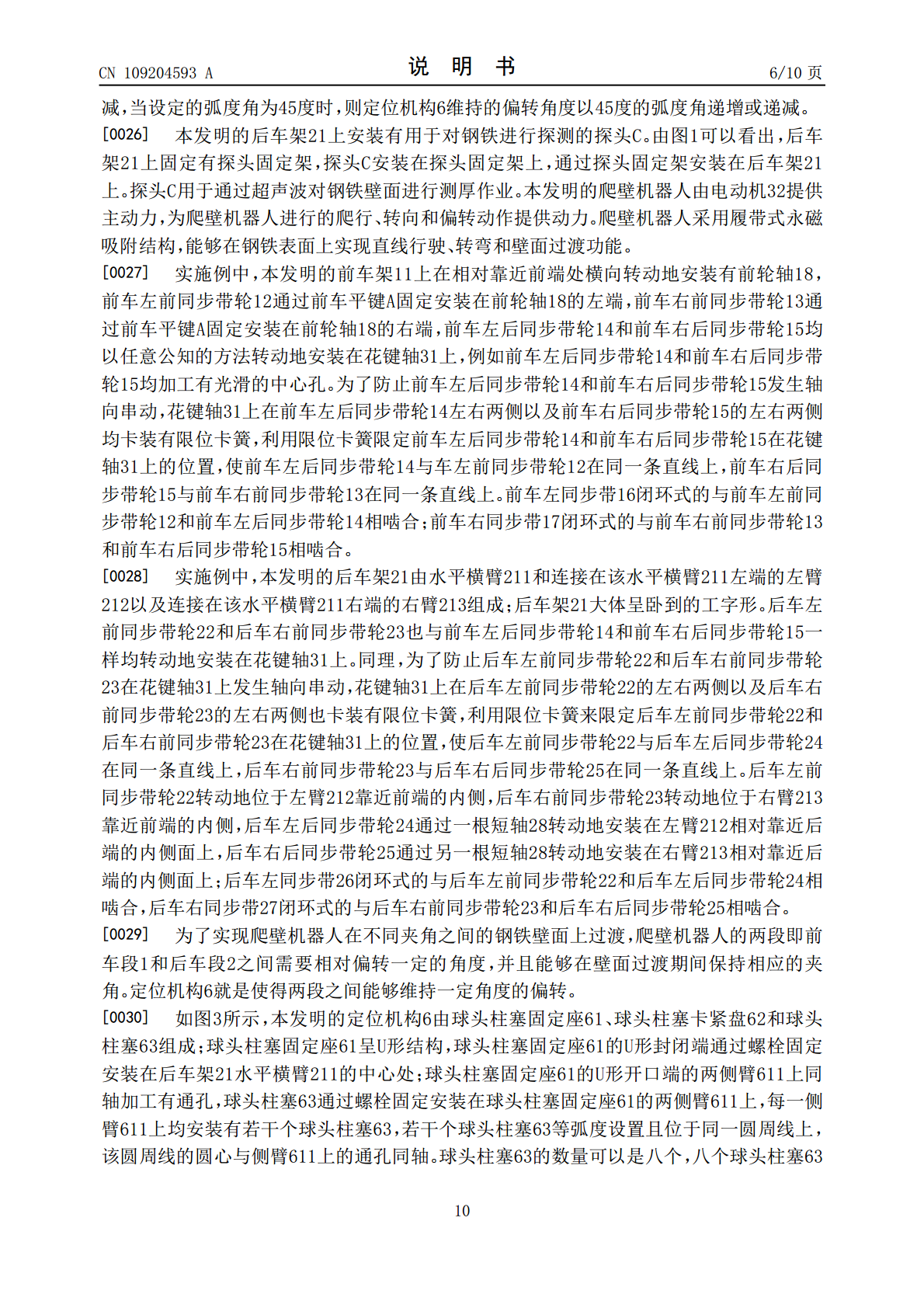
本发明公开了一种具备壁面过渡功能的爬壁机器人,包括前车段和后车段;前车段的宽度小于后车段的宽度,前车段的前车左后同步带轮位于后车段的后车左前同步带轮的内侧,前车段的前车右后同步带轮位于后车段的后车右前同步带轮的内侧;后车段的后车架上安装有由花键轴和电动机构成的动力输出机构;花键轴配设有偏转离合机构;偏转离合机构包括后车偏转离合机构以及前车偏转离合机构;前车段的前车左同步带和前车右同步带以及后车段的后车左同步带和后车右同步带上均安装有永磁铁;前车段的前车架与后车段的后车架之间连接有使前车段能相对后车段维持一
一种可实现直角壁面过渡的永磁吸附爬壁机器人.pdf
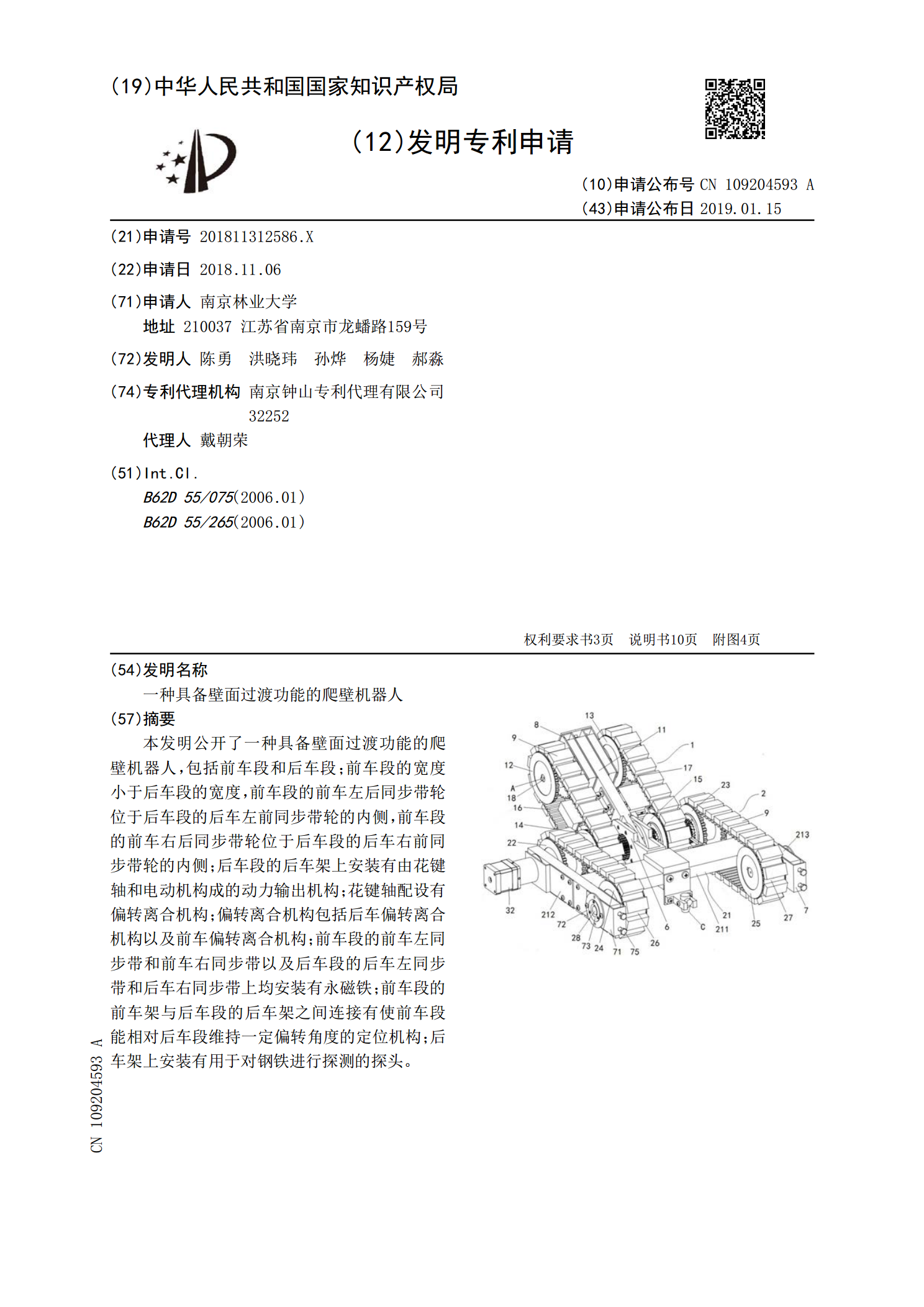
一种可实现直角壁面过渡的永磁吸附爬壁机器人,主要应用于金属壁面等结构的检测行业。该爬壁机器人包括移动模块、连接结构、吸附模块,其中移动模块由聚氨酯胶轮、减速直流电机、两侧固定板、上覆板、电机底座、电机轴套、固定螺母共同组成。吸附模块由包括永磁体、导磁体、永磁体固定板。爬壁机器人有吸附模块提供吸附力完成对金属壁面的吸附,通过直流电机驱动由移动模块完成行走任务,连接结构是用于连接前后连个移动模块,弹性材料使爬壁机器人能够很好的完成越障和壁面过渡工作。本发明结构简单,实现了金属壁面的爬行和直角壁面的转换工作。

一种具有壁面转换功能的越障爬壁机器人.pdf
本发明公开了一种具有壁面转换功能的越障爬壁机器人,包括两个单体爬壁机器人和俯仰偏摆机构,两个单体爬壁机器人之间通过中间的俯仰偏摆机构连接,所述单体爬壁机器人包括无刷电机、电机底座、电机支撑架、离心风页、机器人壳体、运动机构、密封垫。无刷电机带动离心风页转动将机器人壳体内部的空气抽出,使机器人壳体内部形成负压,从而使机器人吸附在墙壁上。俯仰偏摆机构可以辅助机器人跨越障碍和转向。本发明双体爬壁机器人能够在墙壁表面灵活的移动,并且可以跨越墙壁上的沟槽和大的凸起障碍、完成在相邻壁面之间的转换,有效提高了爬壁机器人
一种具有壁面过渡能力的履带式磁吸附爬壁机器人.pdf
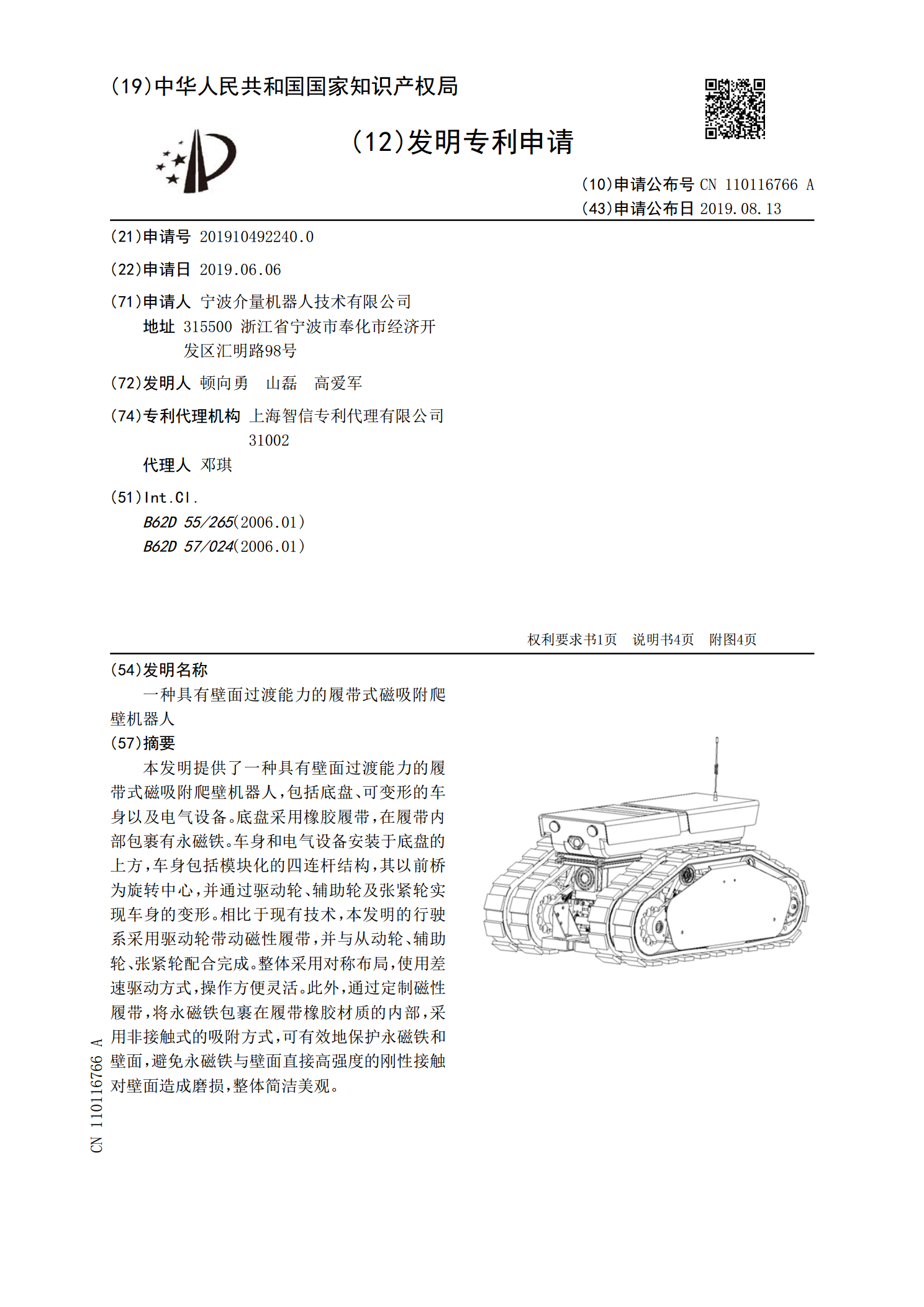
本发明提供了一种具有壁面过渡能力的履带式磁吸附爬壁机器人,包括底盘、可变形的车身以及电气设备。底盘采用橡胶履带,在履带内部包裹有永磁铁。车身和电气设备安装于底盘的上方,车身包括模块化的四连杆结构,其以前桥为旋转中心,并通过驱动轮、辅助轮及张紧轮实现车身的变形。相比于现有技术,本发明的行驶系采用驱动轮带动磁性履带,并与从动轮、辅助轮、张紧轮配合完成。整体采用对称布局,使用差速驱动方式,操作方便灵活。此外,通过定制磁性履带,将永磁铁包裹在履带橡胶材质的内部,采用非接触式的吸附方式,可有效地保护永磁铁和壁面,避

一种可实现三维壁面过渡的爬壁机器人运动机构.pdf
本发明涉及一种履带式磁吸附爬壁机器人的运动机构,包括移动模块、吸附模块以及壁面过渡模块,采用柔性的壁面过渡机构来实现在三维复杂壁面的运动。通过行走电机带动连接在电机的齿轮传动,进而带动履带轮转动,从而实现机器人的运动,在移动模块的履带表面贴上橡胶磁条,可以保证机器人吸附在可导磁壁面上;移动模块之间通过扭力弹簧连接,当机器人需要进行壁面转换时,与该移动模块连接的扭力弹簧提供其所需要的力矩,实现移动模块在不同壁面之间的过渡;本发明具有结构简单,负载能力大,壁面适应性强,实现了爬壁机器人在三维空间壁面的自由运动