
两轮车及两轮车车体倾角测量校准方法.pdf

婀娜****aj

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
两轮车及两轮车车体倾角测量校准方法.pdf
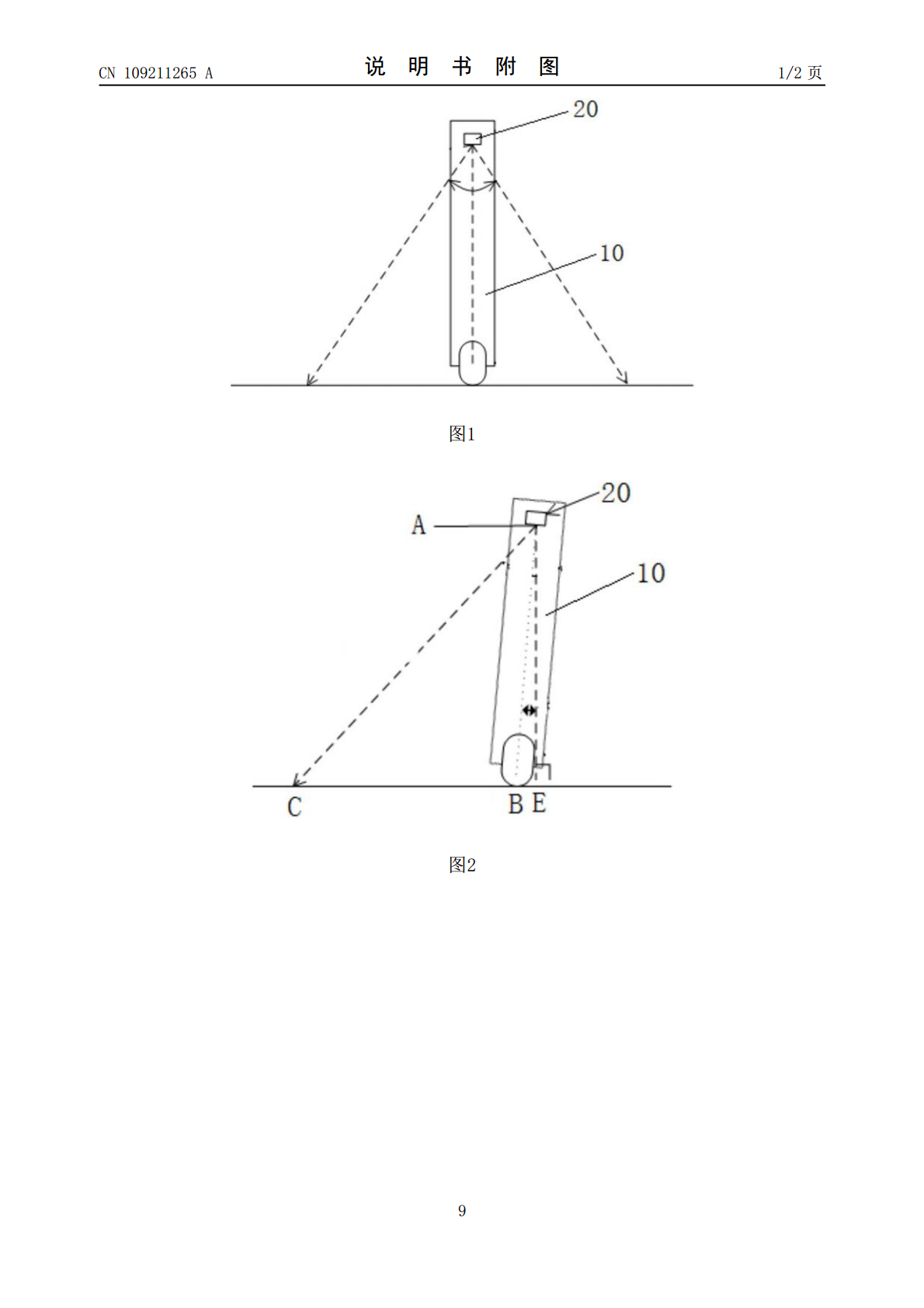
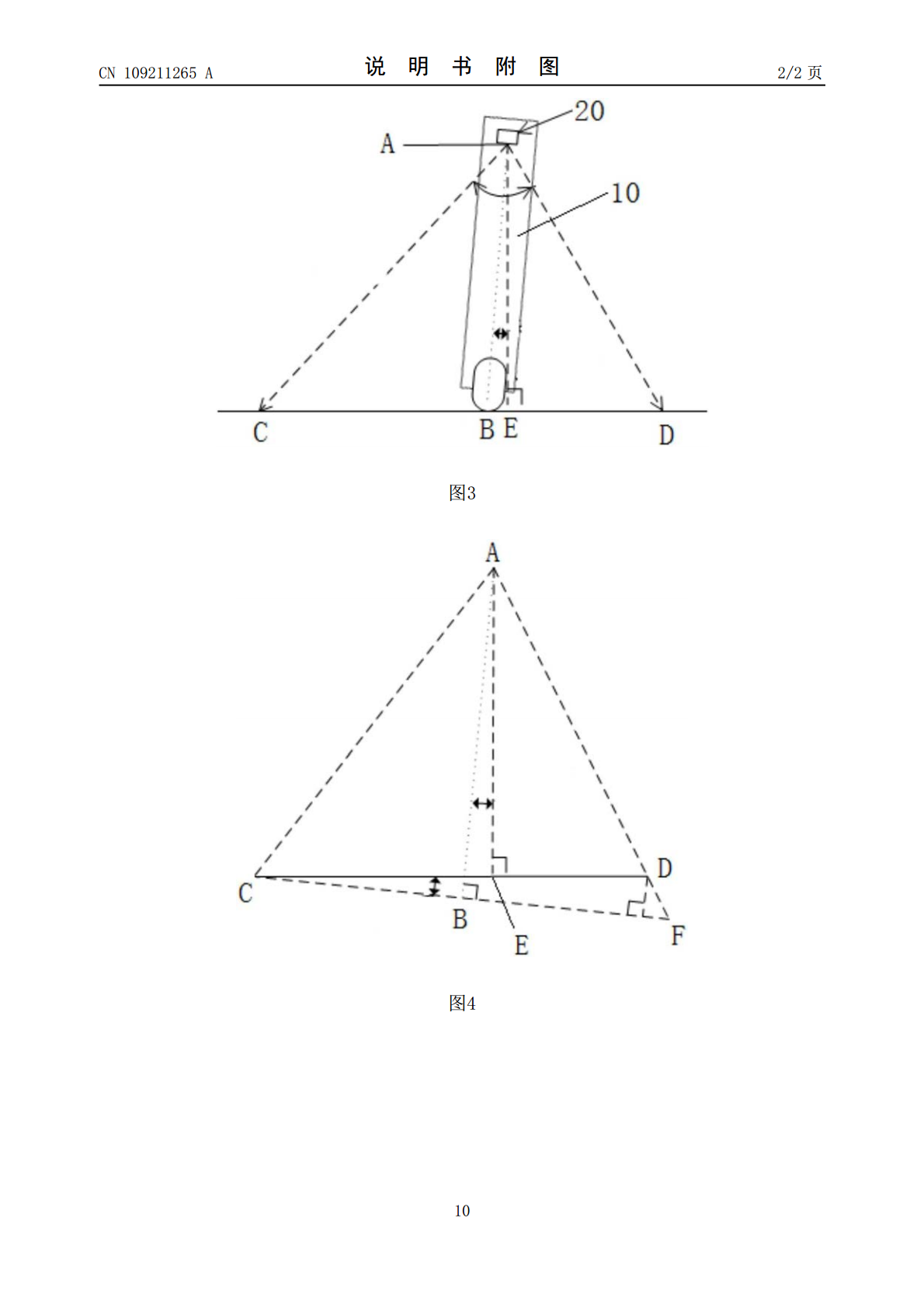
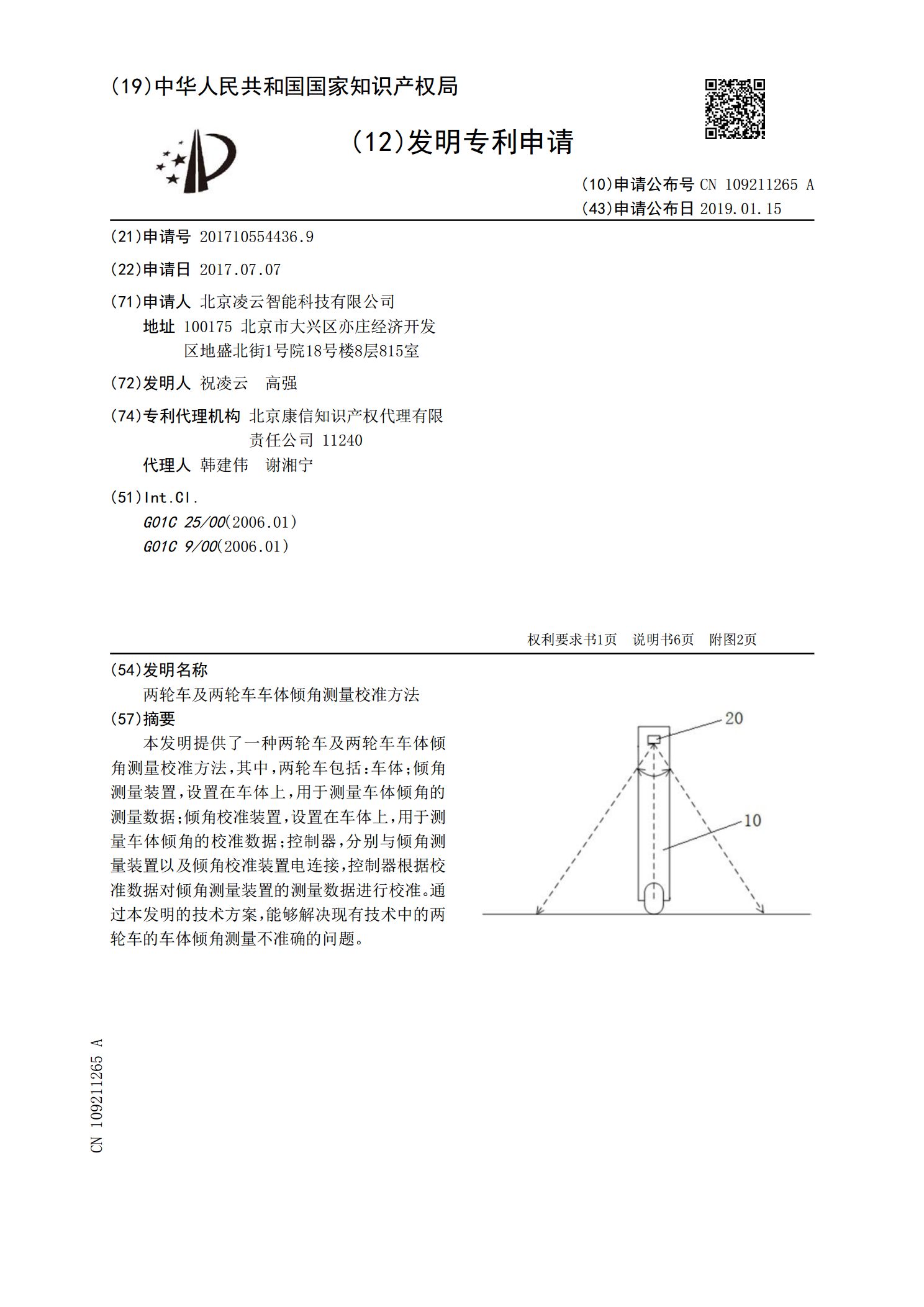
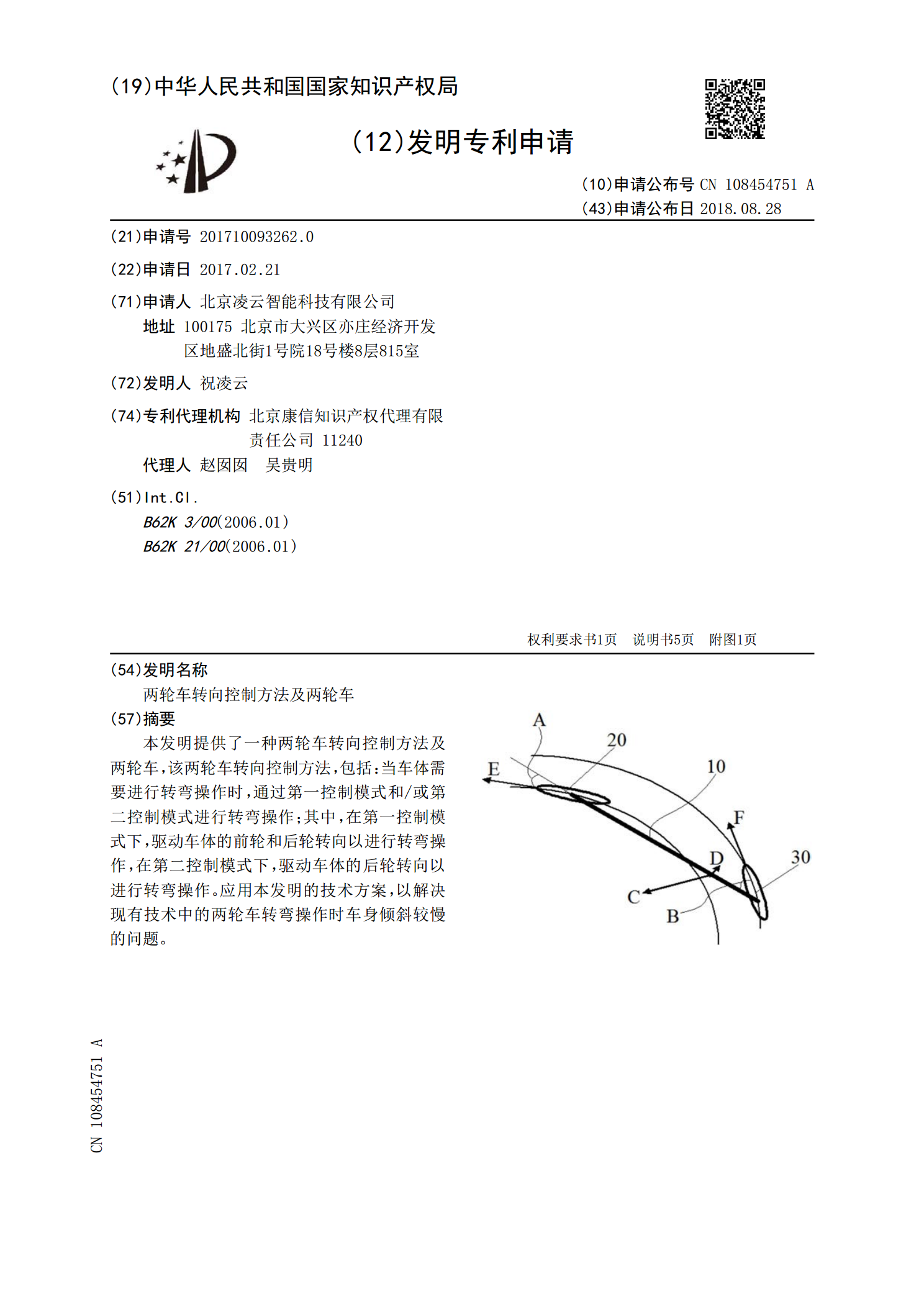
本发明提供了一种两轮车及两轮车车体倾角测量校准方法,其中,两轮车包括:车体;倾角测量装置,设置在车体上,用于测量车体倾角的测量数据;倾角校准装置,设置在车体上,用于测量车体倾角的校准数据;控制器,分别与倾角测量装置以及倾角校准装置电连接,控制器根据校准数据对倾角测量装置的测量数据进行校准。通过本发明的技术方案,能够解决现有技术中的两轮车的车体倾角测量不准确的问题。

用于确定两轮车的侧倾角的方法.pdf
在用于确定两轮车的侧倾角的方法中,获得在至少一个车轮处的轴载荷,并且将所述侧倾角作为所述轴载荷的函数来计算。
两轮车转向控制方法及两轮车.pdf
本发明提供了一种两轮车转向控制方法及两轮车,该两轮车转向控制方法,包括:当车体需要进行转弯操作时,通过第一控制模式和/或第二控制模式进行转弯操作;其中,在第一控制模式下,驱动车体的前轮和后轮转向以进行转弯操作,在第二控制模式下,驱动车体的后轮转向以进行转弯操作。应用本发明的技术方案,以解决现有技术中的两轮车转弯操作时车身倾斜较慢的问题。
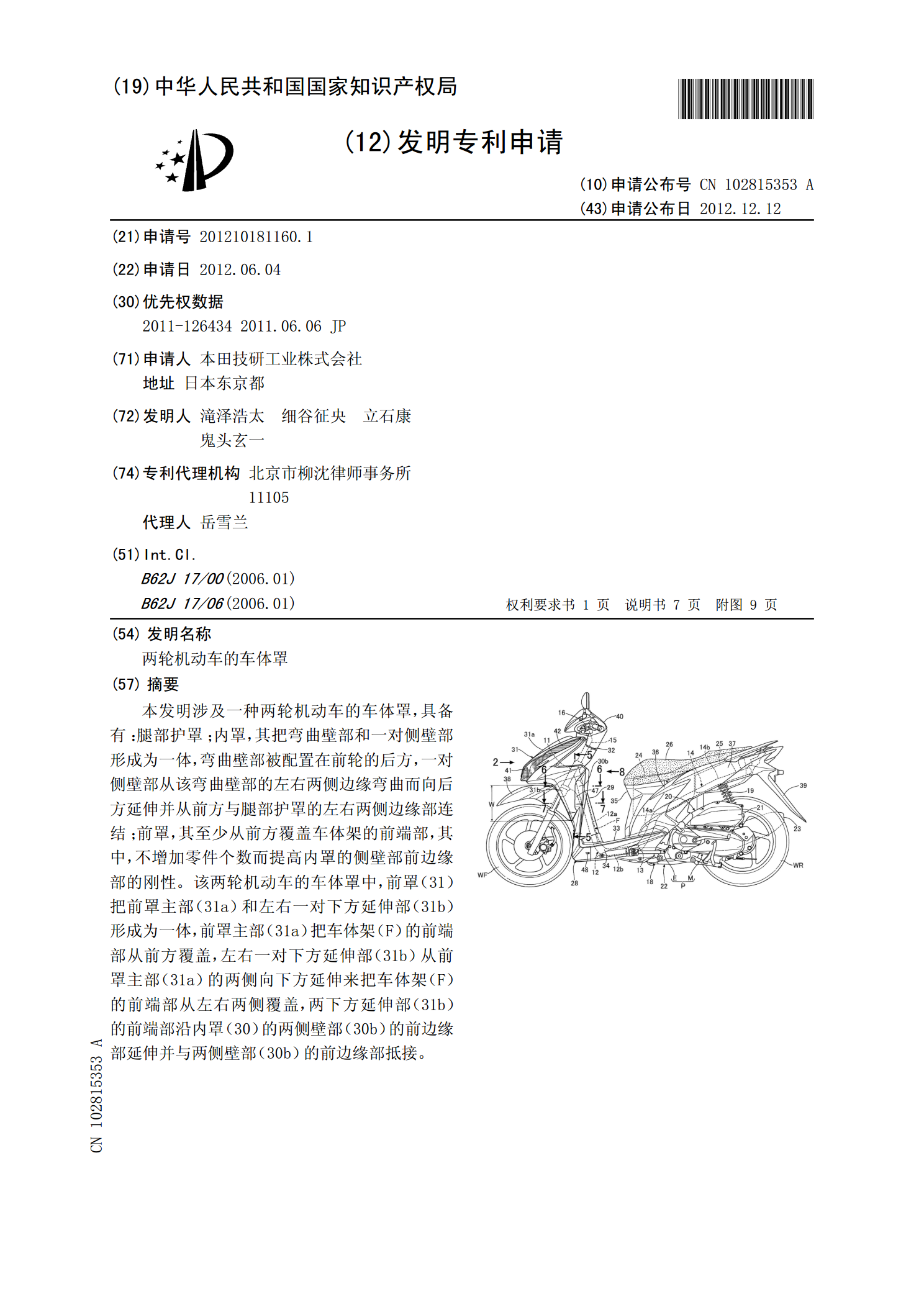
两轮机动车的车体罩.pdf
本发明涉及一种两轮机动车的车体罩,具备有:腿部护罩;内罩,其把弯曲壁部和一对侧壁部形成为一体,弯曲壁部被配置在前轮的后方,一对侧壁部从该弯曲壁部的左右两侧边缘弯曲而向后方延伸并从前方与腿部护罩的左右两侧边缘部连结;前罩,其至少从前方覆盖车体架的前端部,其中,不增加零件个数而提高内罩的侧壁部前边缘部的刚性。该两轮机动车的车体罩中,前罩(31)把前罩主部(31a)和左右一对下方延伸部(31b)形成为一体,前罩主部(31a)把车体架(F)的前端部从前方覆盖,左右一对下方延伸部(31b)从前罩主部(31a)的两侧
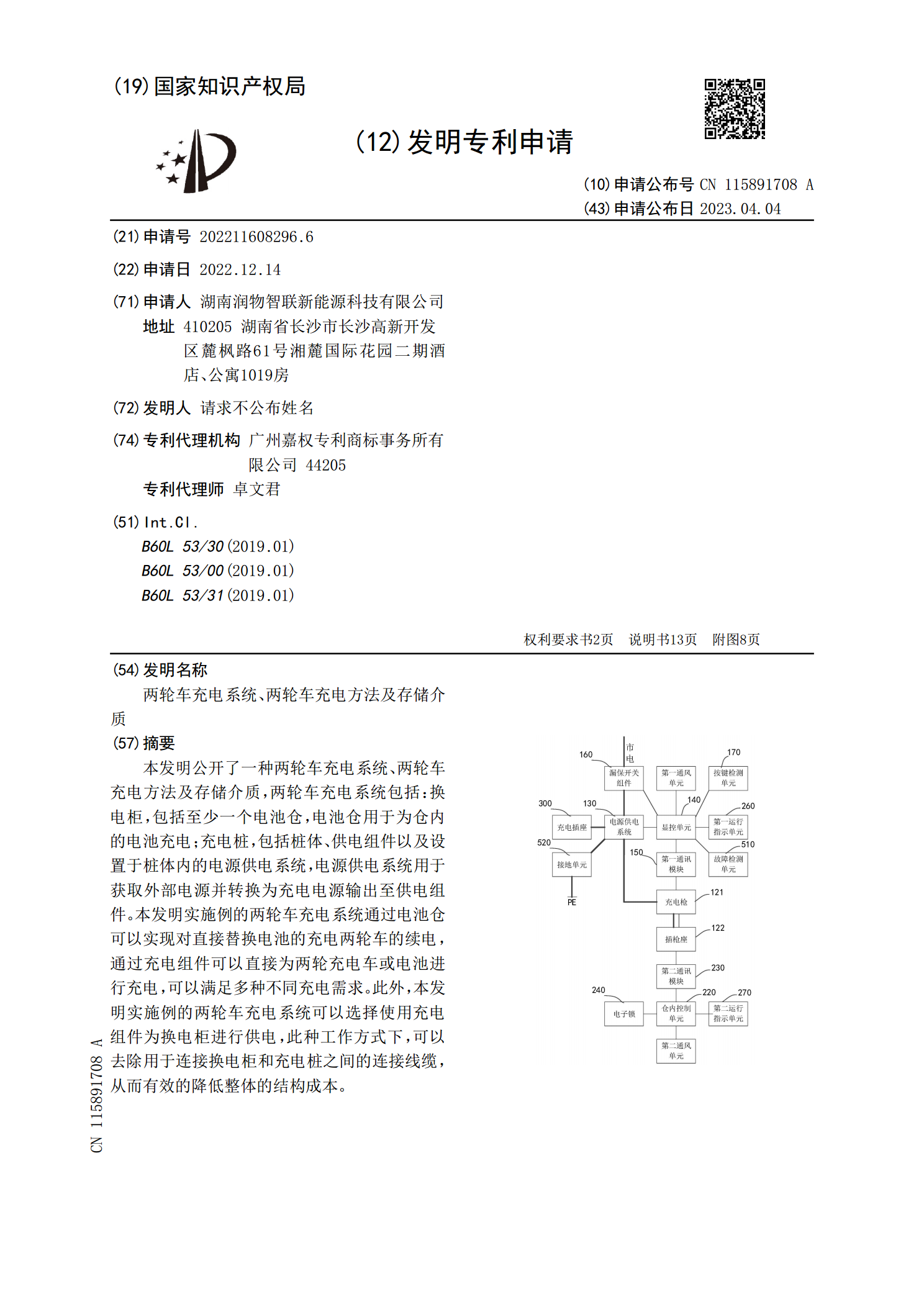
两轮车充电系统、两轮车充电方法及存储介质.pdf
本发明公开了一种两轮车充电系统、两轮车充电方法及存储介质,两轮车充电系统包括:换电柜,包括至少一个电池仓,电池仓用于为仓内的电池充电;充电桩,包括桩体、供电组件以及设置于桩体内的电源供电系统,电源供电系统用于获取外部电源并转换为充电电源输出至供电组件。本发明实施例的两轮车充电系统通过电池仓可以实现对直接替换电池的充电两轮车的续电,通过充电组件可以直接为两轮充电车或电池进行充电,可以满足多种不同充电需求。此外,本发明实施例的两轮车充电系统可以选择使用充电组件为换电柜进行供电,此种工作方式下,可以去除用于连接