
基于同轴式轮腿结构的主动姿态与全轮转向协同控制方法.pdf

是你****岺呀

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于同轴式轮腿结构的主动姿态与全轮转向协同控制方法.pdf
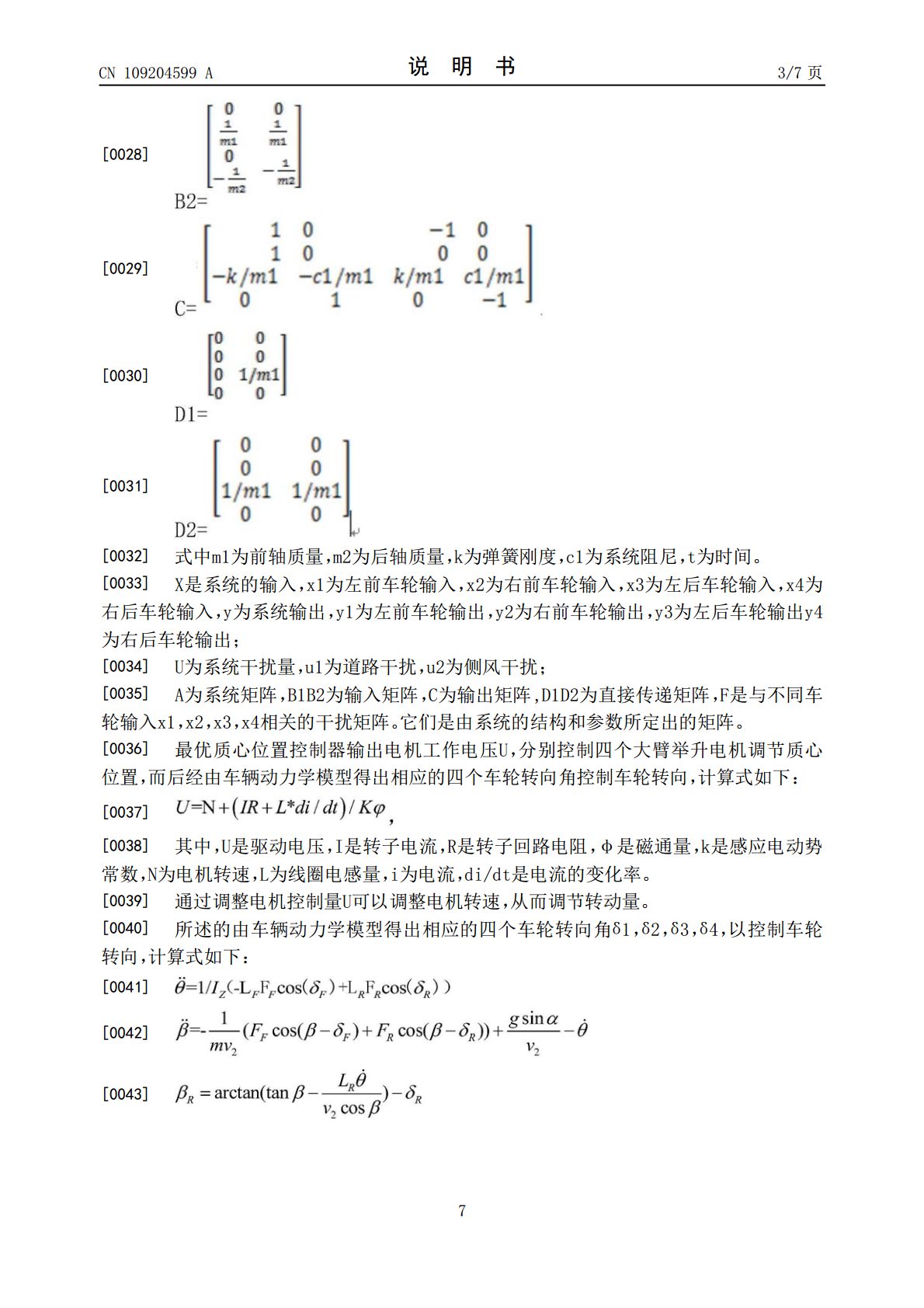
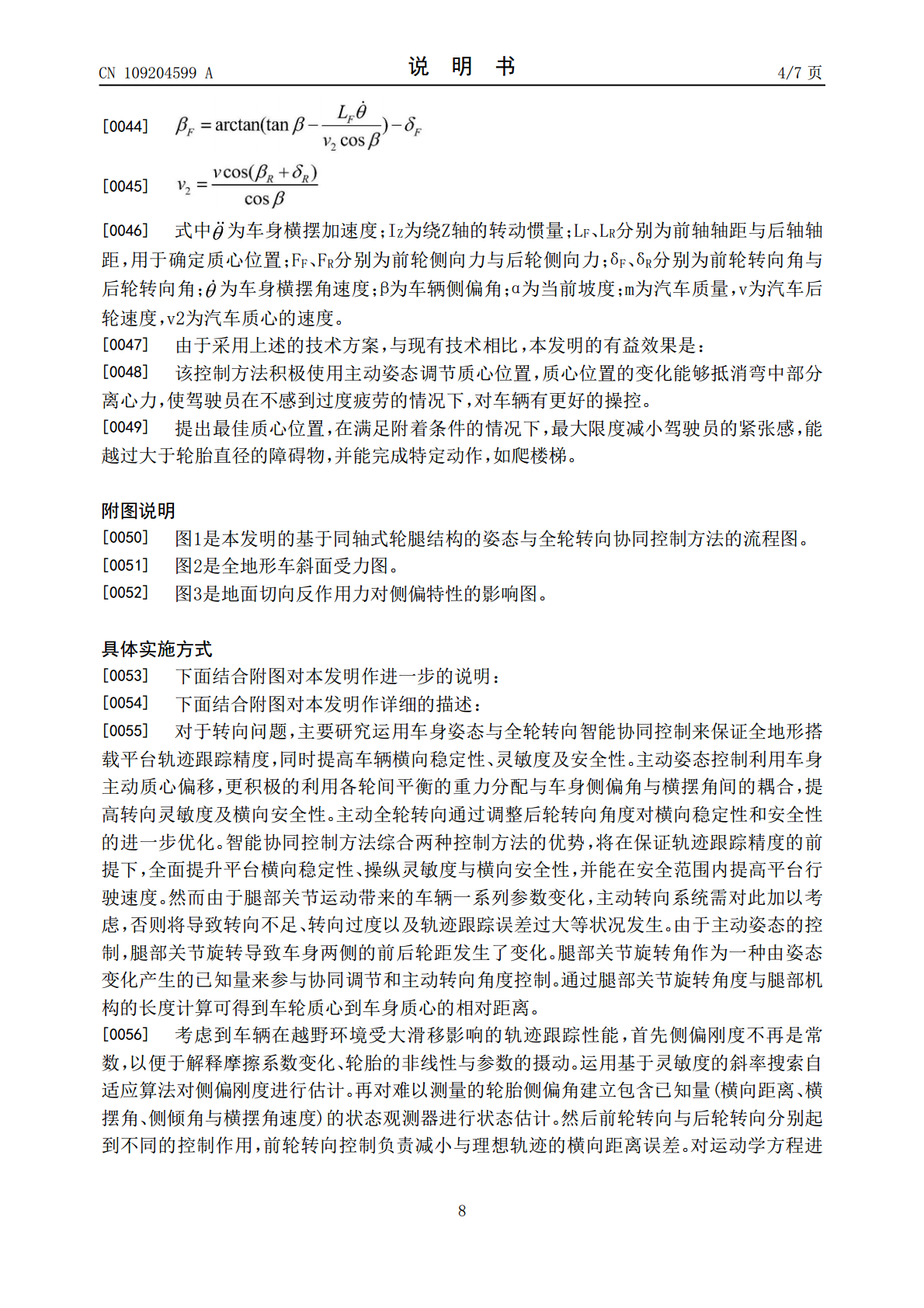
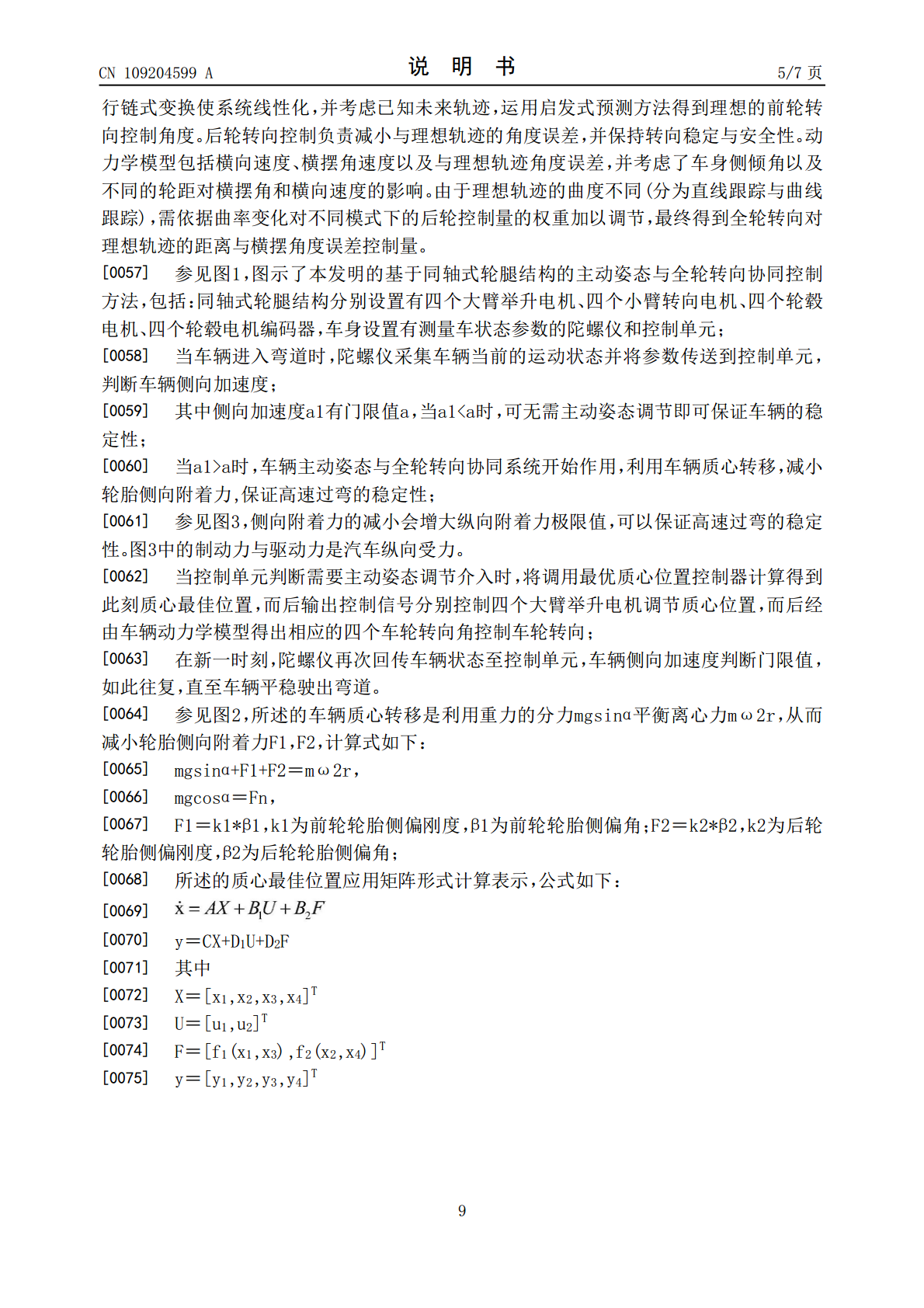
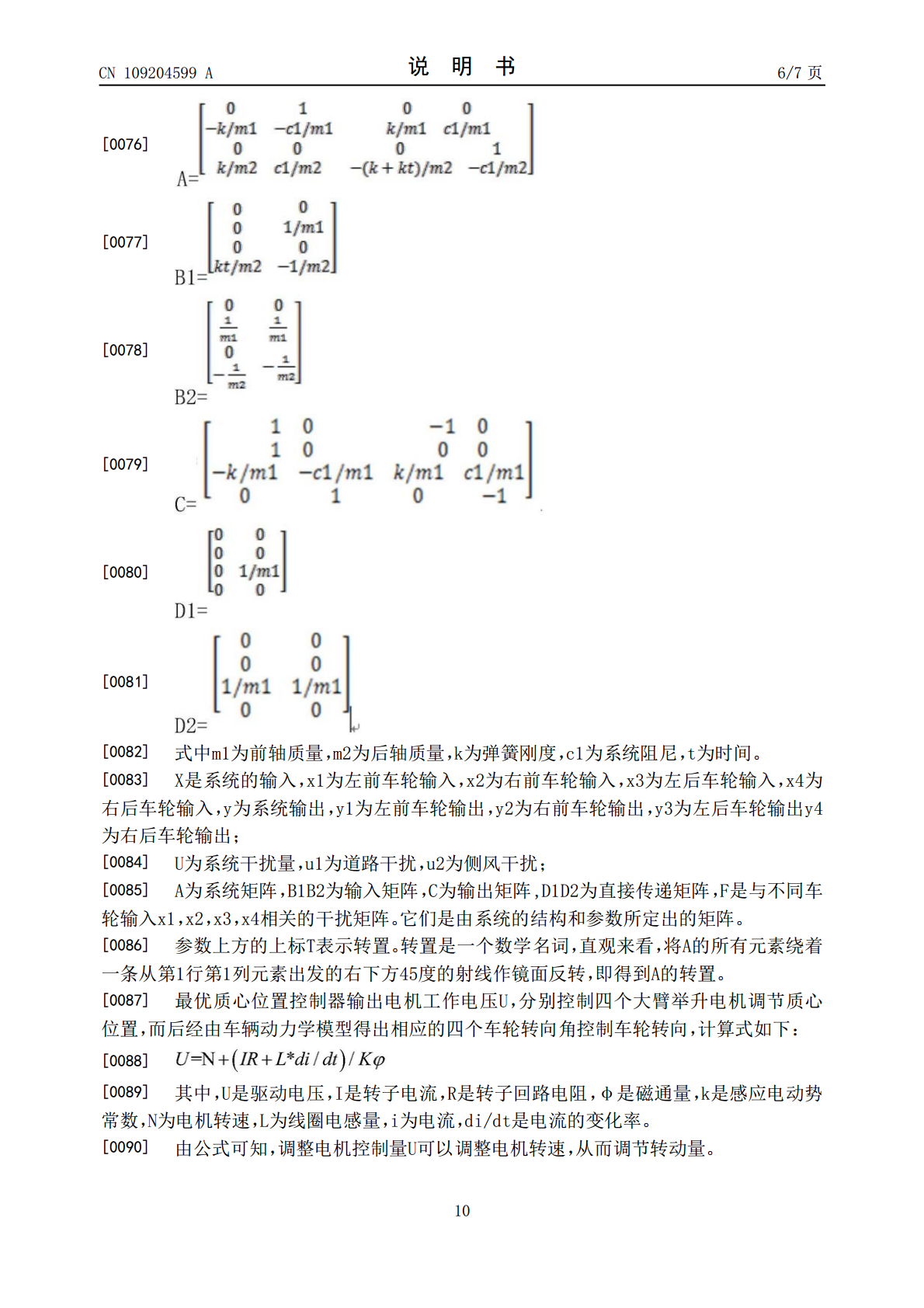
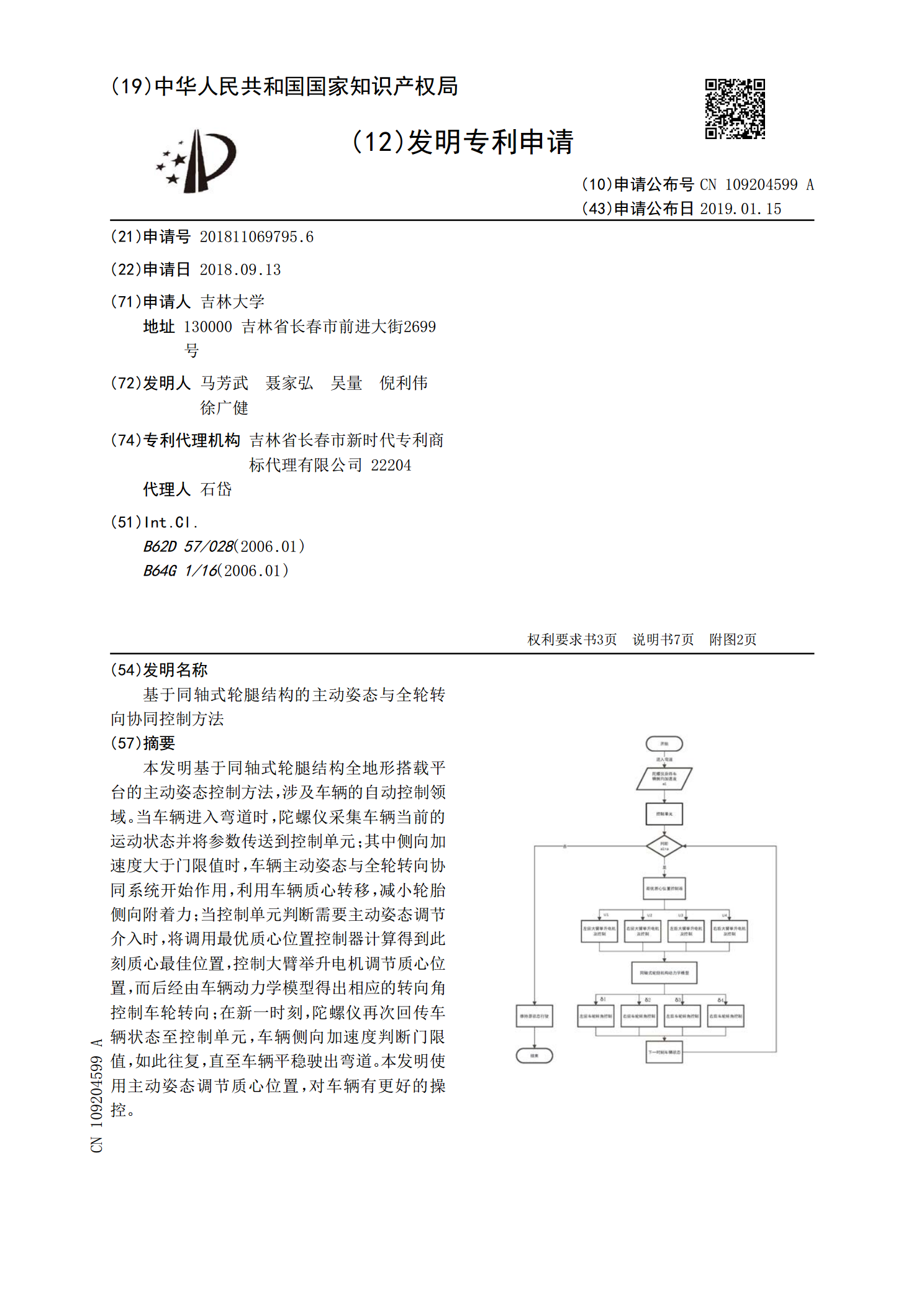
本发明基于同轴式轮腿结构全地形搭载平台的主动姿态控制方法,涉及车辆的自动控制领域。当车辆进入弯道时,陀螺仪采集车辆当前的运动状态并将参数传送到控制单元;其中侧向加速度大于门限值时,车辆主动姿态与全轮转向协同系统开始作用,利用车辆质心转移,减小轮胎侧向附着力;当控制单元判断需要主动姿态调节介入时,将调用最优质心位置控制器计算得到此刻质心最佳位置,控制大臂举升电机调节质心位置,而后经由车辆动力学模型得出相应的转向角控制车轮转向;在新一时刻,陀螺仪再次回传车辆状态至控制单元,车辆侧向加速度判断门限值,如此往复,
基于同轴式轮腿结构的全地形车主动车身姿态控制方法.pdf
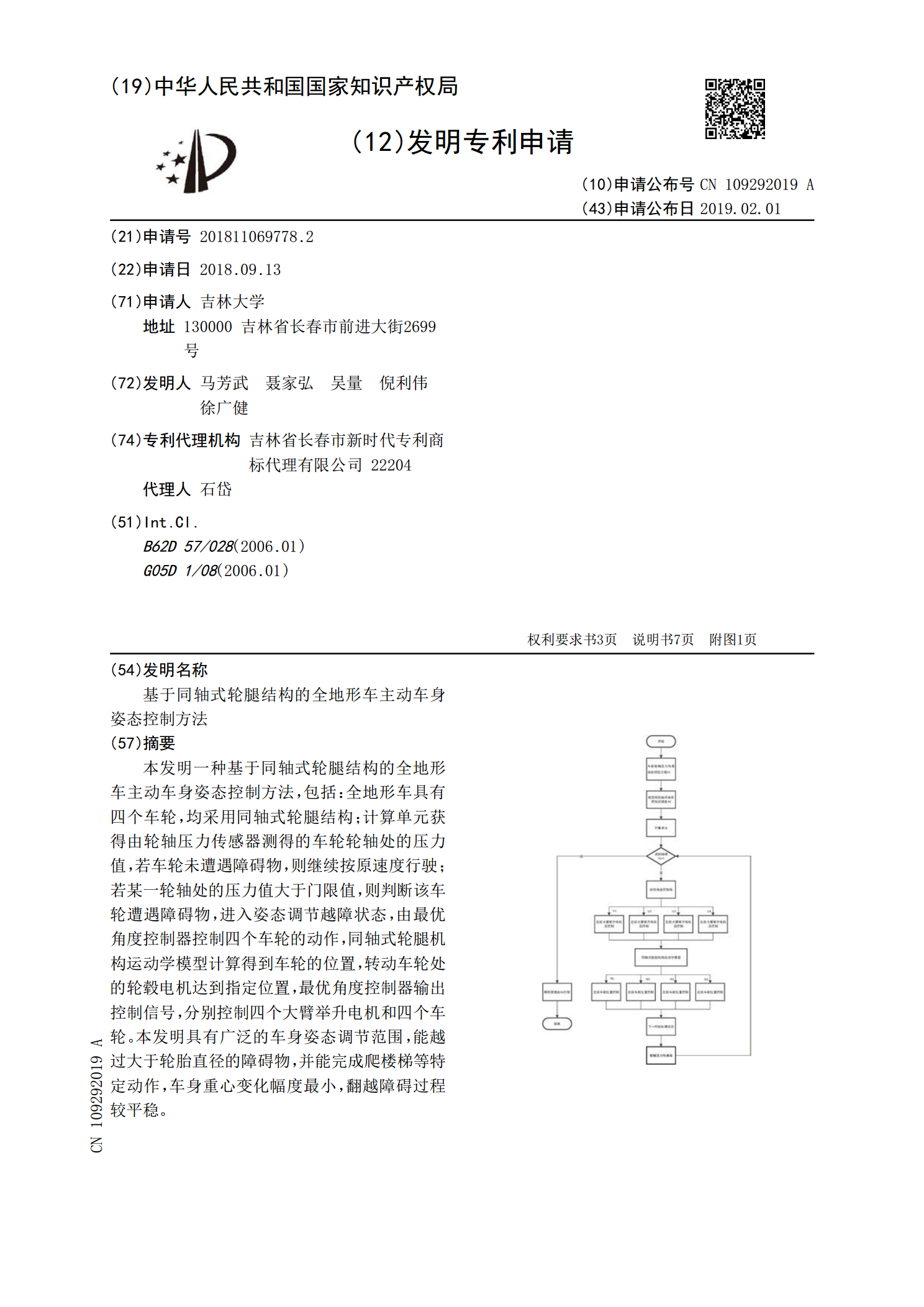
本发明一种基于同轴式轮腿结构的全地形车主动车身姿态控制方法,包括:全地形车具有四个车轮,均采用同轴式轮腿结构;计算单元获得由轮轴压力传感器测得的车轮轮轴处的压力值,若车轮未遭遇障碍物,则继续按原速度行驶;若某一轮轴处的压力值大于门限值,则判断该车轮遭遇障碍物,进入姿态调节越障状态,由最优角度控制器控制四个车轮的动作,同轴式轮腿机构运动学模型计算得到车轮的位置,转动车轮处的轮毂电机达到指定位置,最优角度控制器输出控制信号,分别控制四个大臂举升电机和四个车轮。本发明具有广泛的车身姿态调节范围,能越过大于轮胎直
基于同轴式轮腿结构的四轮转向轨迹跟踪控制方法.pdf
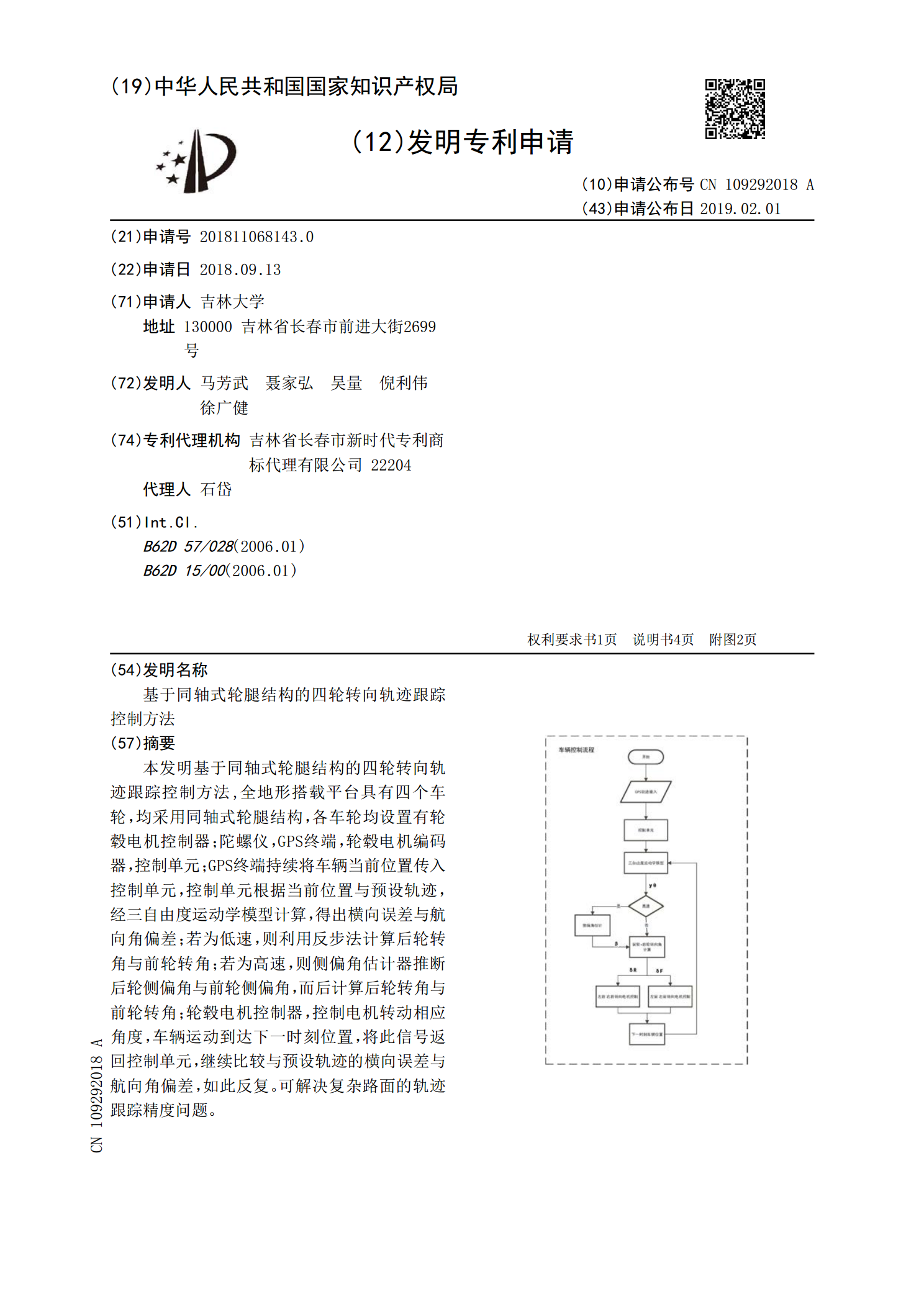
本发明基于同轴式轮腿结构的四轮转向轨迹跟踪控制方法,全地形搭载平台具有四个车轮,均采用同轴式轮腿结构,各车轮均设置有轮毂电机控制器;陀螺仪,GPS终端,轮毂电机编码器,控制单元;GPS终端持续将车辆当前位置传入控制单元,控制单元根据当前位置与预设轨迹,经三自由度运动学模型计算,得出横向误差与航向角偏差;若为低速,则利用反步法计算后轮转角与前轮转角;若为高速,则侧偏角估计器推断后轮侧偏角与前轮侧偏角,而后计算后轮转角与前轮转角;轮毂电机控制器,控制电机转动相应角度,车辆运动到达下一时刻位置,将此信号返回控制
同轴式全地形轮腿移动机器人.pdf
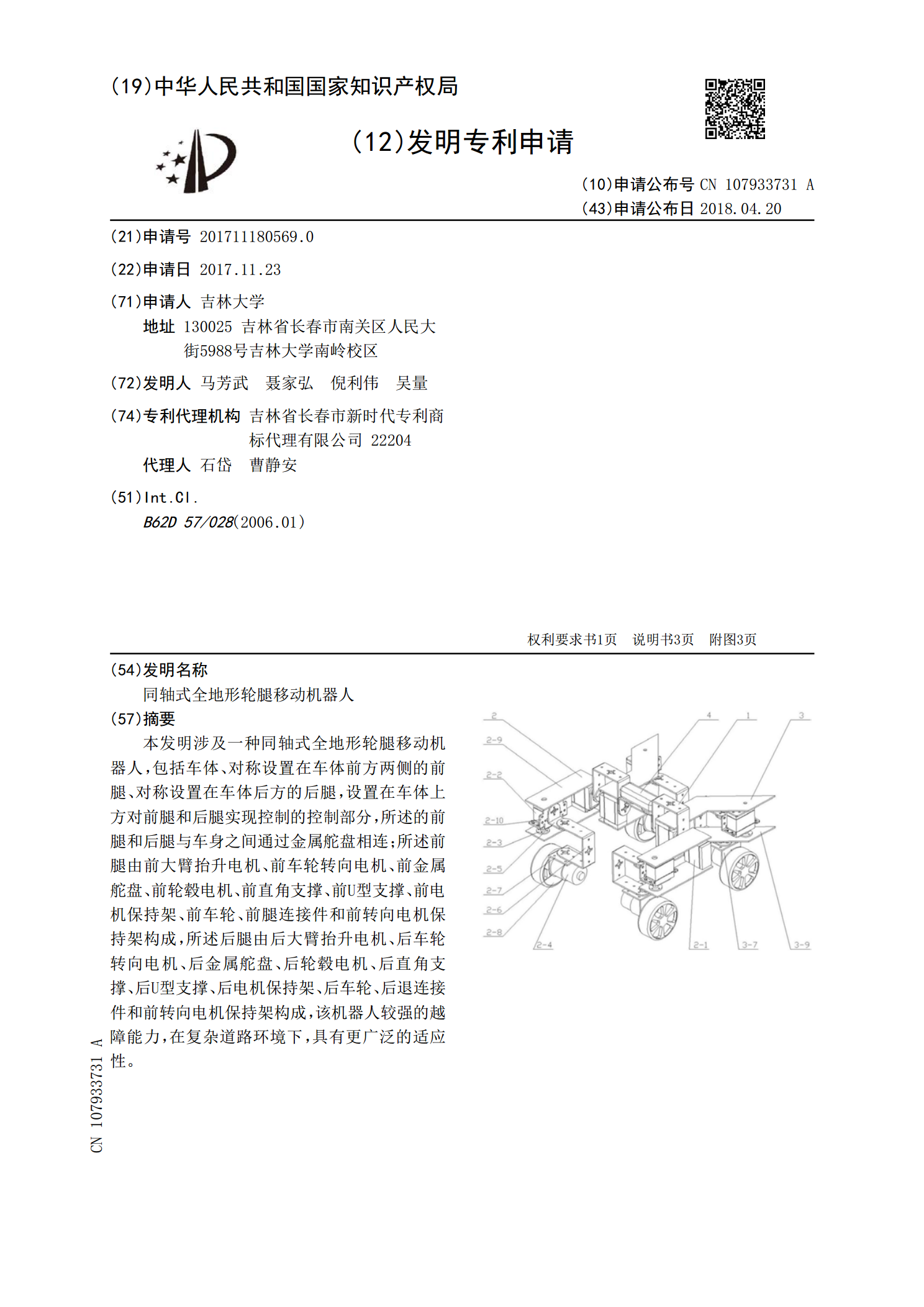
本发明涉及一种同轴式全地形轮腿移动机器人,包括车体、对称设置在车体前方两侧的前腿、对称设置在车体后方的后腿,设置在车体上方对前腿和后腿实现控制的控制部分,所述的前腿和后腿与车身之间通过金属舵盘相连;所述前腿由前大臂抬升电机、前车轮转向电机、前金属舵盘、前轮毂电机、前直角支撑、前U型支撑、前电机保持架、前车轮、前腿连接件和前转向电机保持架构成,所述后腿由后大臂抬升电机、后车轮转向电机、后金属舵盘、后轮毂电机、后直角支撑、后U型支撑、后电机保持架、后车轮、后退连接件和前转向电机保持架构成,该机器人较强的越障能

一种基于动量轮控制的全姿态捕获方法.pdf
本发明涉及一种基于动量轮控制的全姿态捕获方法,包括如下步骤:(1)速率阻尼;(2)恒星捕获;(3)姿态更新和星本体地磁强度计算;(4)太阳搜索和太阳定向姿态确定;(5)目标捕获姿态确定;(6)轮控调姿和磁力矩器卸载。本发明针对航天器全姿态捕获问题,提出一种工程可操作性强的、基于动量轮控制的全姿态捕获方法。