
同轴式全地形轮腿移动机器人.pdf

小新****ou

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
同轴式全地形轮腿移动机器人.pdf
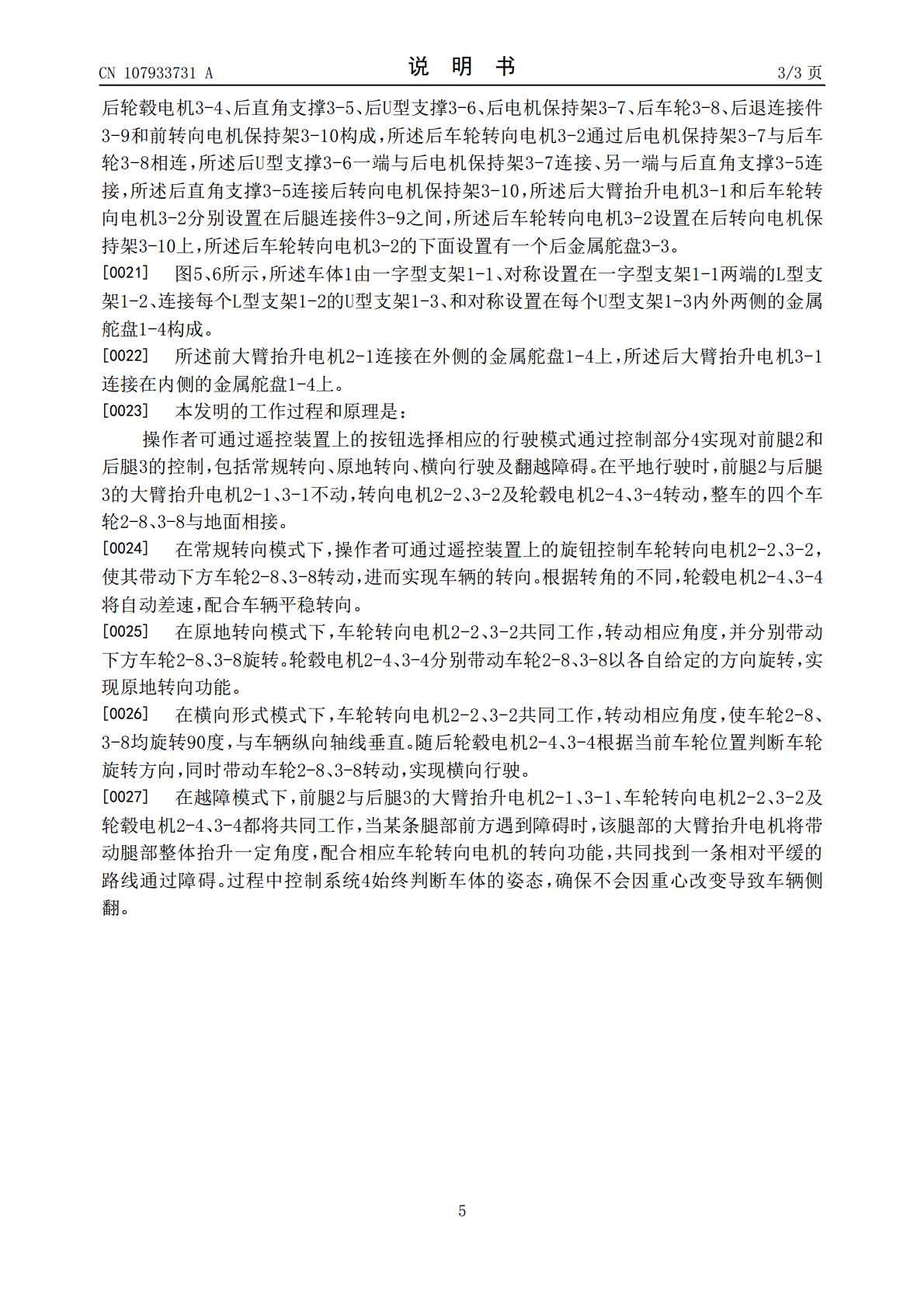
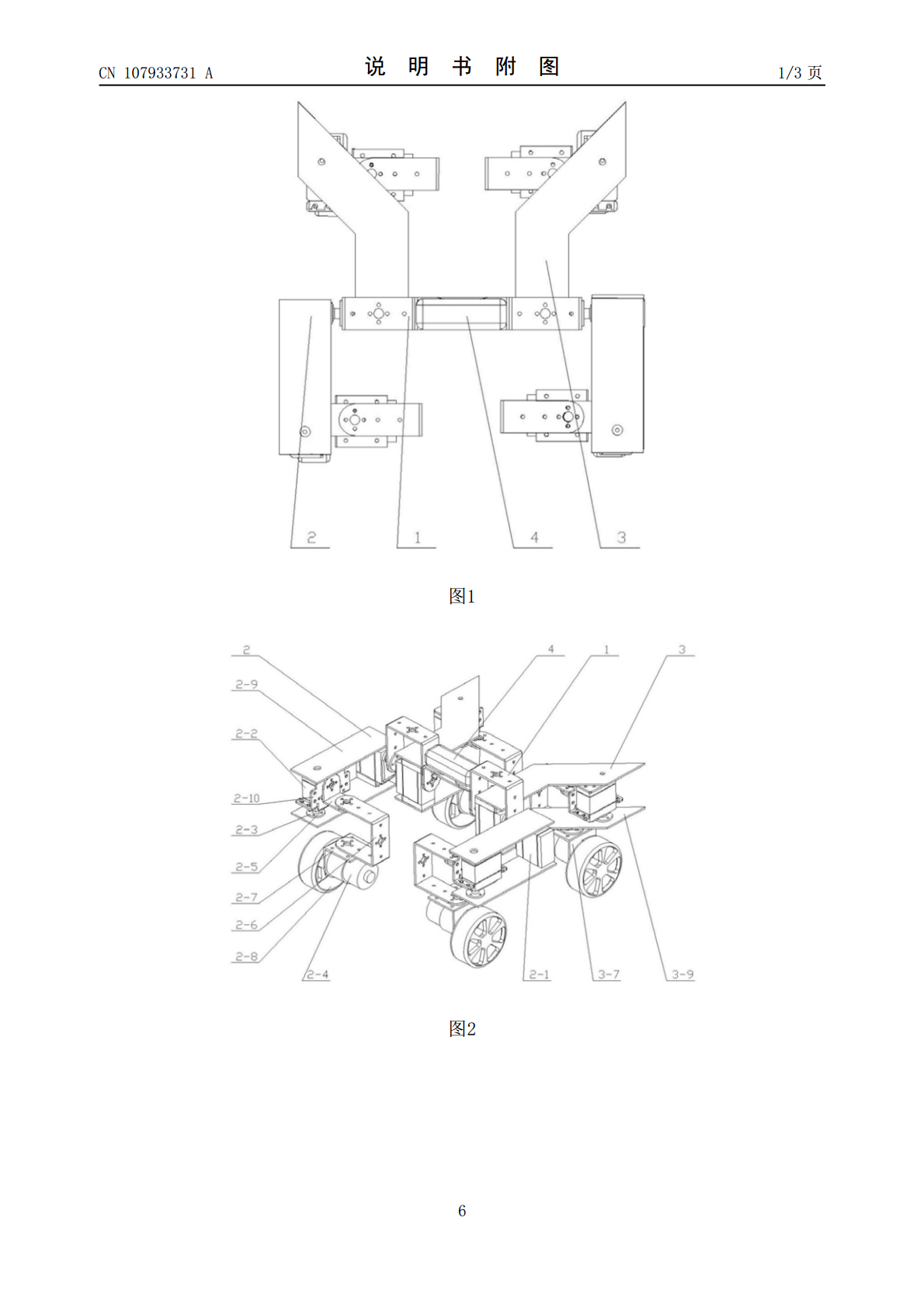
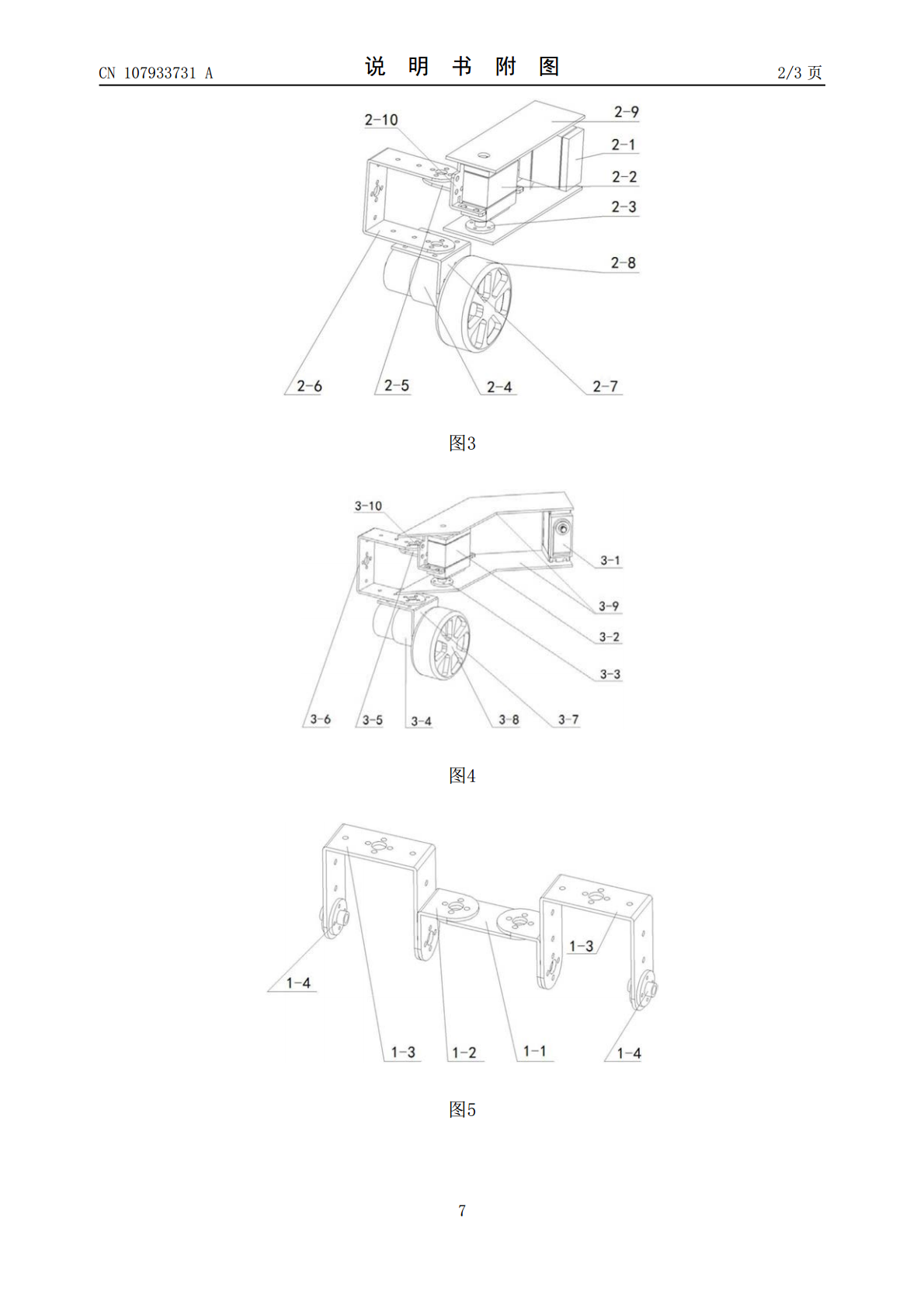
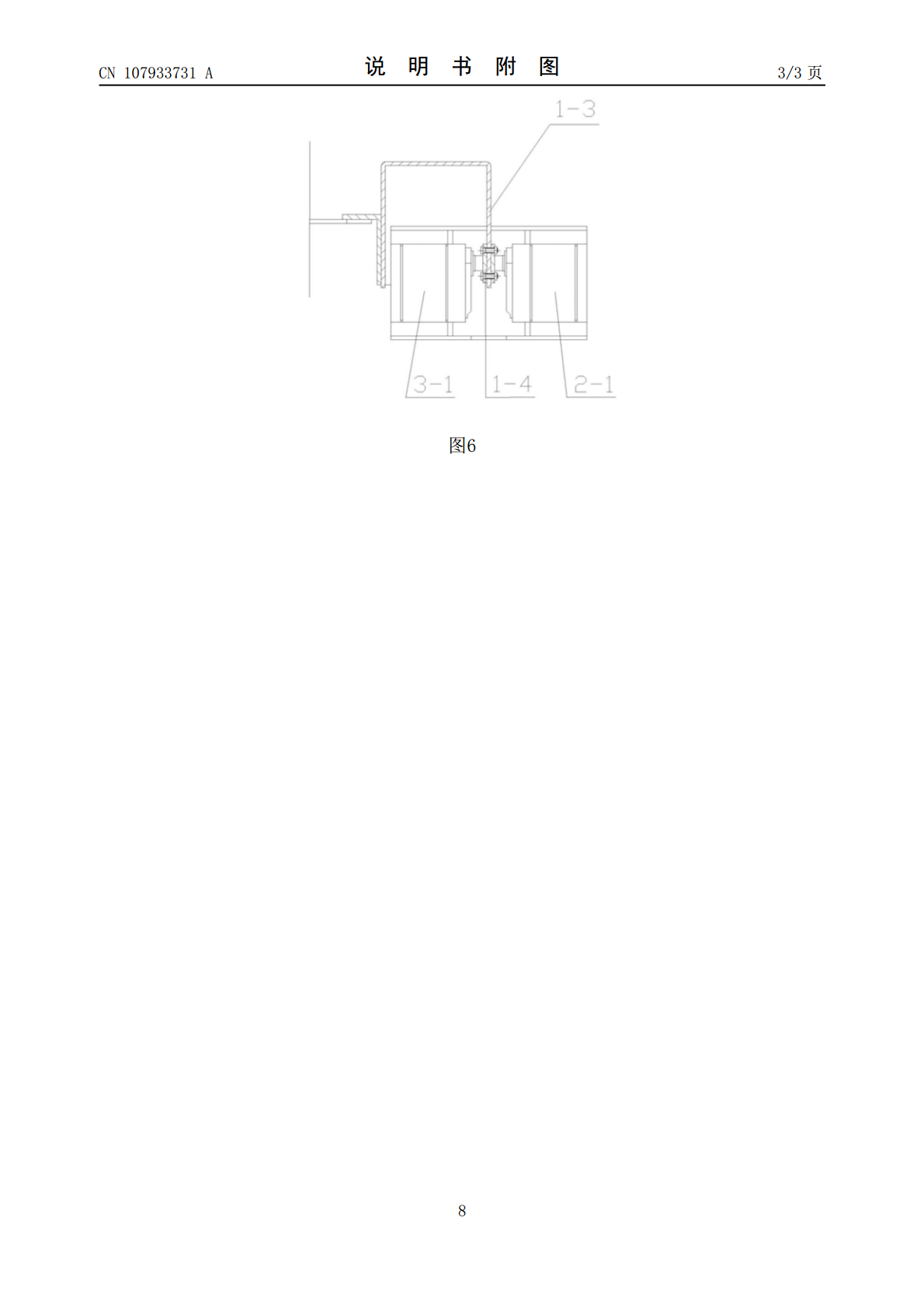
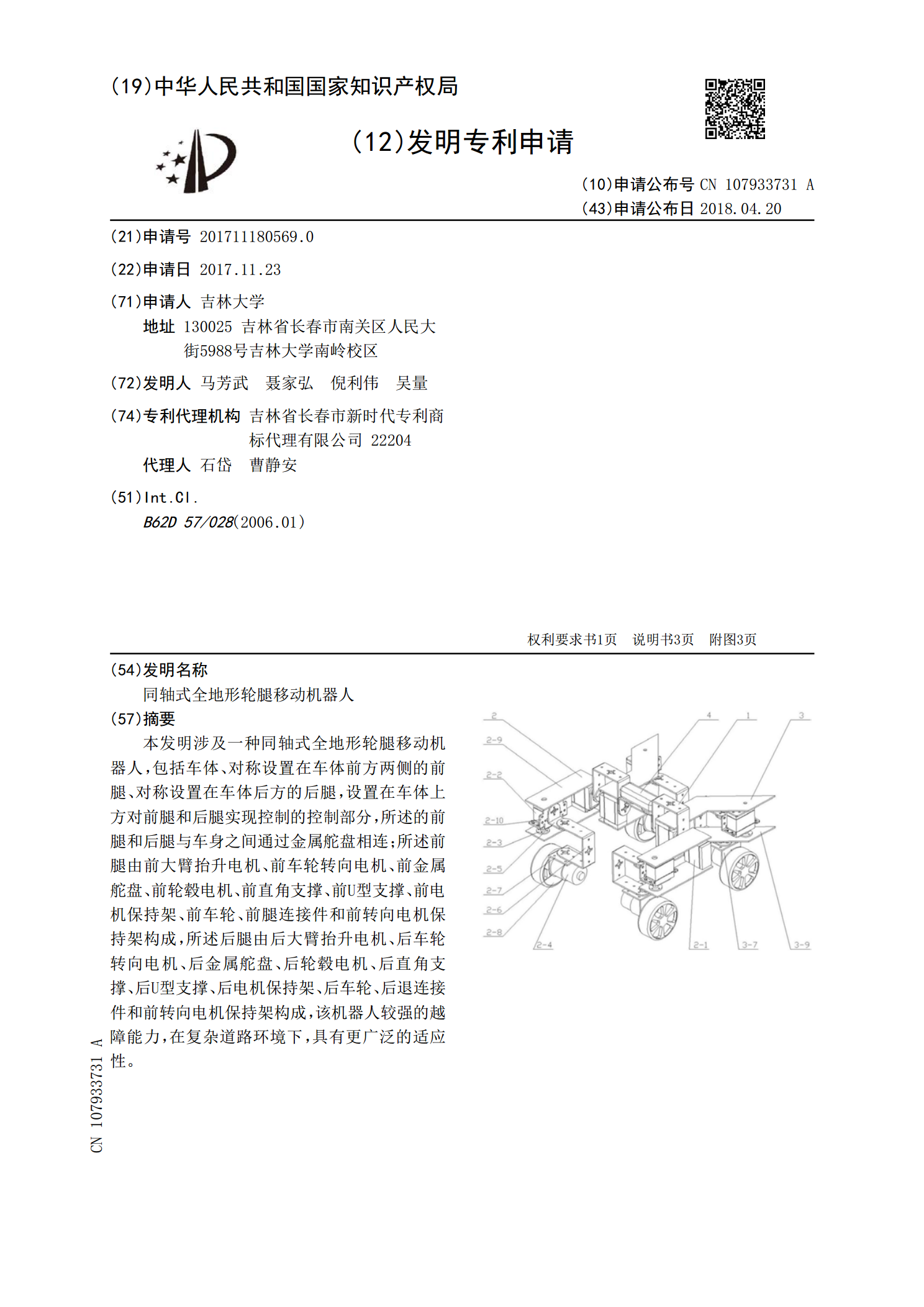
本发明涉及一种同轴式全地形轮腿移动机器人,包括车体、对称设置在车体前方两侧的前腿、对称设置在车体后方的后腿,设置在车体上方对前腿和后腿实现控制的控制部分,所述的前腿和后腿与车身之间通过金属舵盘相连;所述前腿由前大臂抬升电机、前车轮转向电机、前金属舵盘、前轮毂电机、前直角支撑、前U型支撑、前电机保持架、前车轮、前腿连接件和前转向电机保持架构成,所述后腿由后大臂抬升电机、后车轮转向电机、后金属舵盘、后轮毂电机、后直角支撑、后U型支撑、后电机保持架、后车轮、后退连接件和前转向电机保持架构成,该机器人较强的越障能
基于同轴式轮腿结构的全地形车主动车身姿态控制方法.pdf
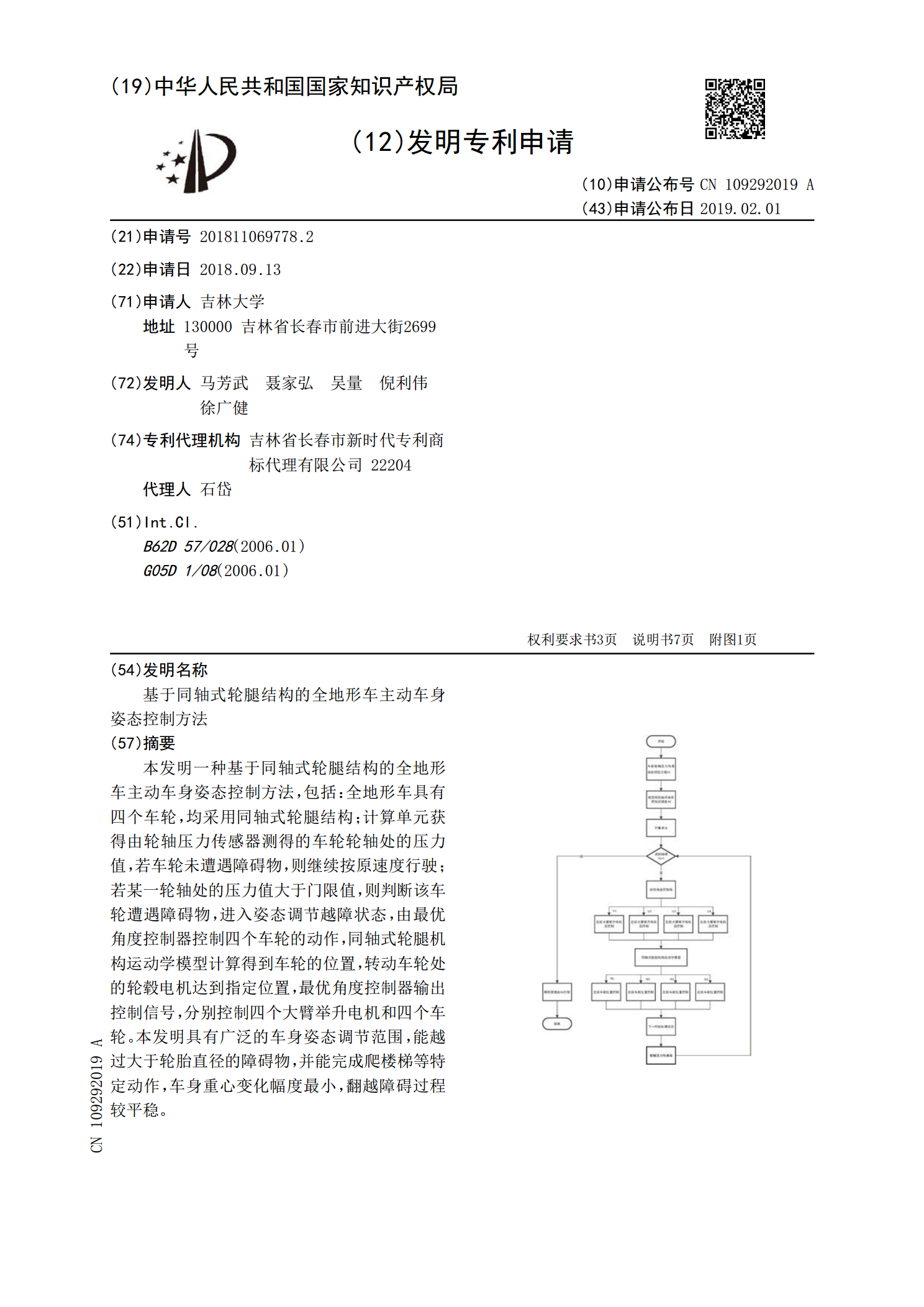
本发明一种基于同轴式轮腿结构的全地形车主动车身姿态控制方法,包括:全地形车具有四个车轮,均采用同轴式轮腿结构;计算单元获得由轮轴压力传感器测得的车轮轮轴处的压力值,若车轮未遭遇障碍物,则继续按原速度行驶;若某一轮轴处的压力值大于门限值,则判断该车轮遭遇障碍物,进入姿态调节越障状态,由最优角度控制器控制四个车轮的动作,同轴式轮腿机构运动学模型计算得到车轮的位置,转动车轮处的轮毂电机达到指定位置,最优角度控制器输出控制信号,分别控制四个大臂举升电机和四个车轮。本发明具有广泛的车身姿态调节范围,能越过大于轮胎直
一种轮腿式全地形车.pdf
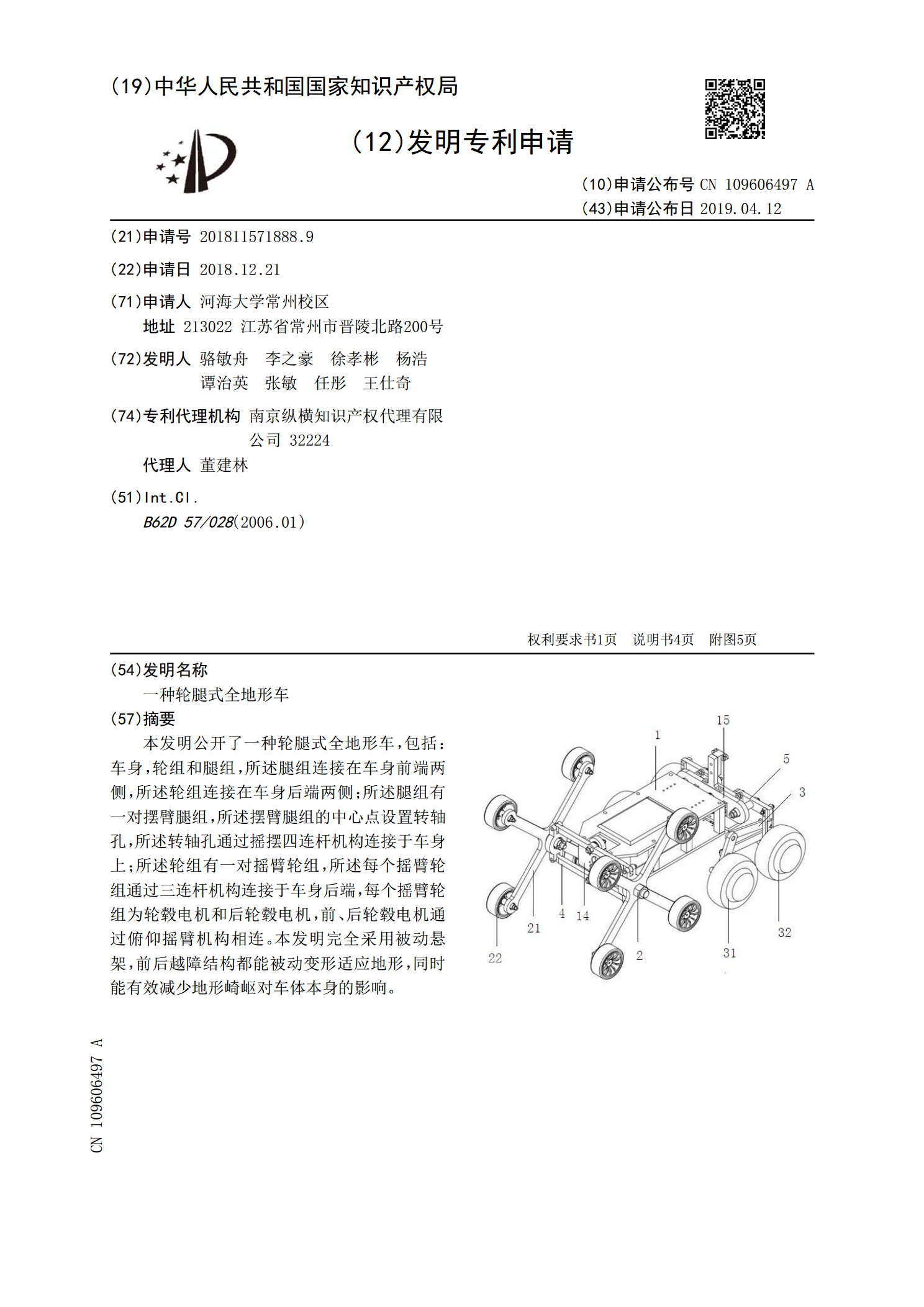
本发明公开了一种轮腿式全地形车,包括:车身,轮组和腿组,所述腿组连接在车身前端两侧,所述轮组连接在车身后端两侧;所述腿组有一对摆臂腿组,所述摆臂腿组的中心点设置转轴孔,所述转轴孔通过摇摆四连杆机构连接于车身上;所述轮组有一对摇臂轮组,所述每个摇臂轮组通过三连杆机构连接于车身后端,每个摇臂轮组为轮毂电机和后轮毂电机,前、后轮毂电机通过俯仰摇臂机构相连。本发明完全采用被动悬架,前后越障结构都能被动变形适应地形,同时能有效减少地形崎岖对车体本身的影响。
双三角形悬架轮腿式全地形移动机器人.pdf
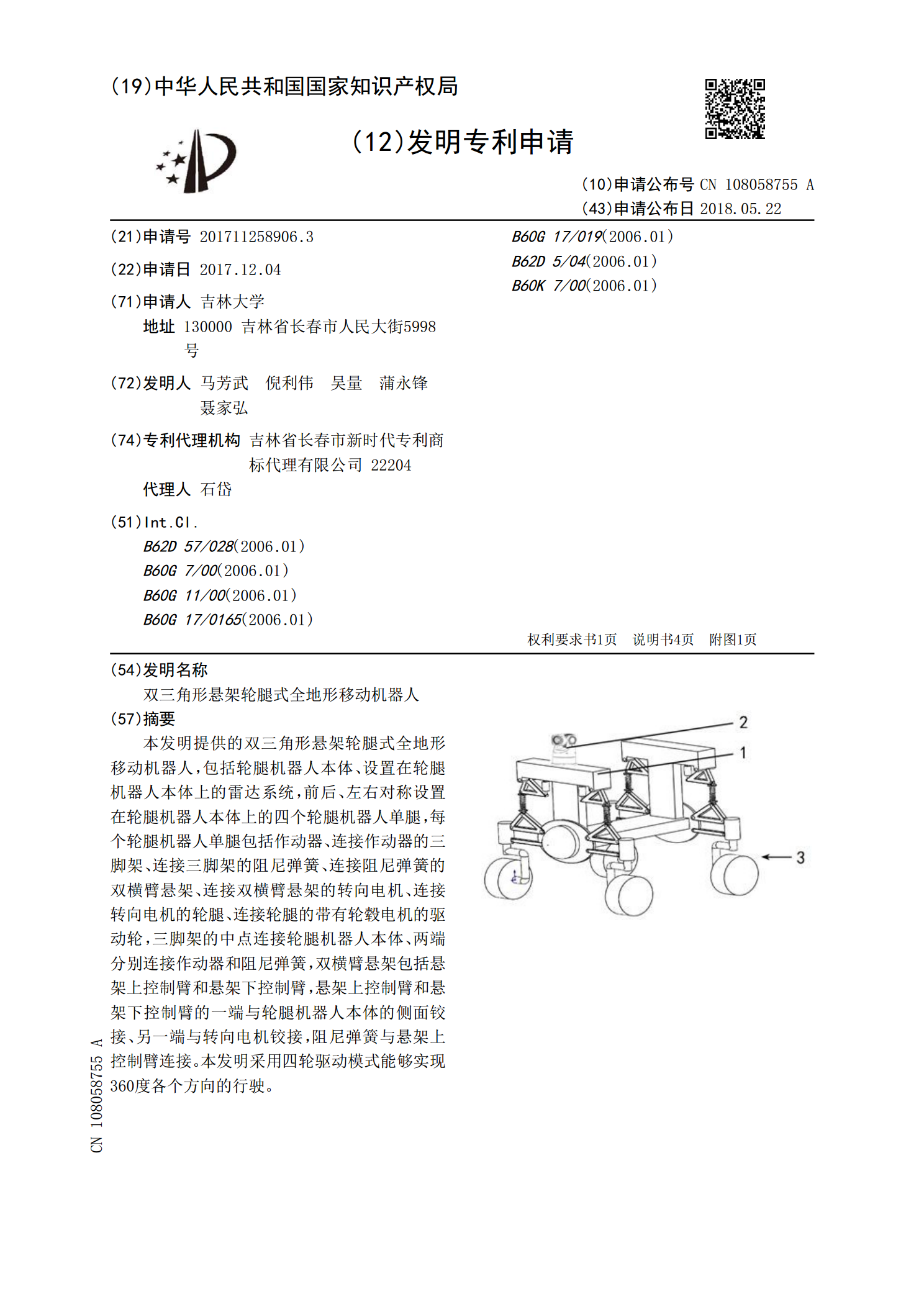
本发明提供的双三角形悬架轮腿式全地形移动机器人,包括轮腿机器人本体、设置在轮腿机器人本体上的雷达系统,前后、左右对称设置在轮腿机器人本体上的四个轮腿机器人单腿,每个轮腿机器人单腿包括作动器、连接作动器的三脚架、连接三脚架的阻尼弹簧、连接阻尼弹簧的双横臂悬架、连接双横臂悬架的转向电机、连接转向电机的轮腿、连接轮腿的带有轮毂电机的驱动轮,三脚架的中点连接轮腿机器人本体、两端分别连接作动器和阻尼弹簧,双横臂悬架包括悬架上控制臂和悬架下控制臂,悬架上控制臂和悬架下控制臂的一端与轮腿机器人本体的侧面铰接、另一端与转
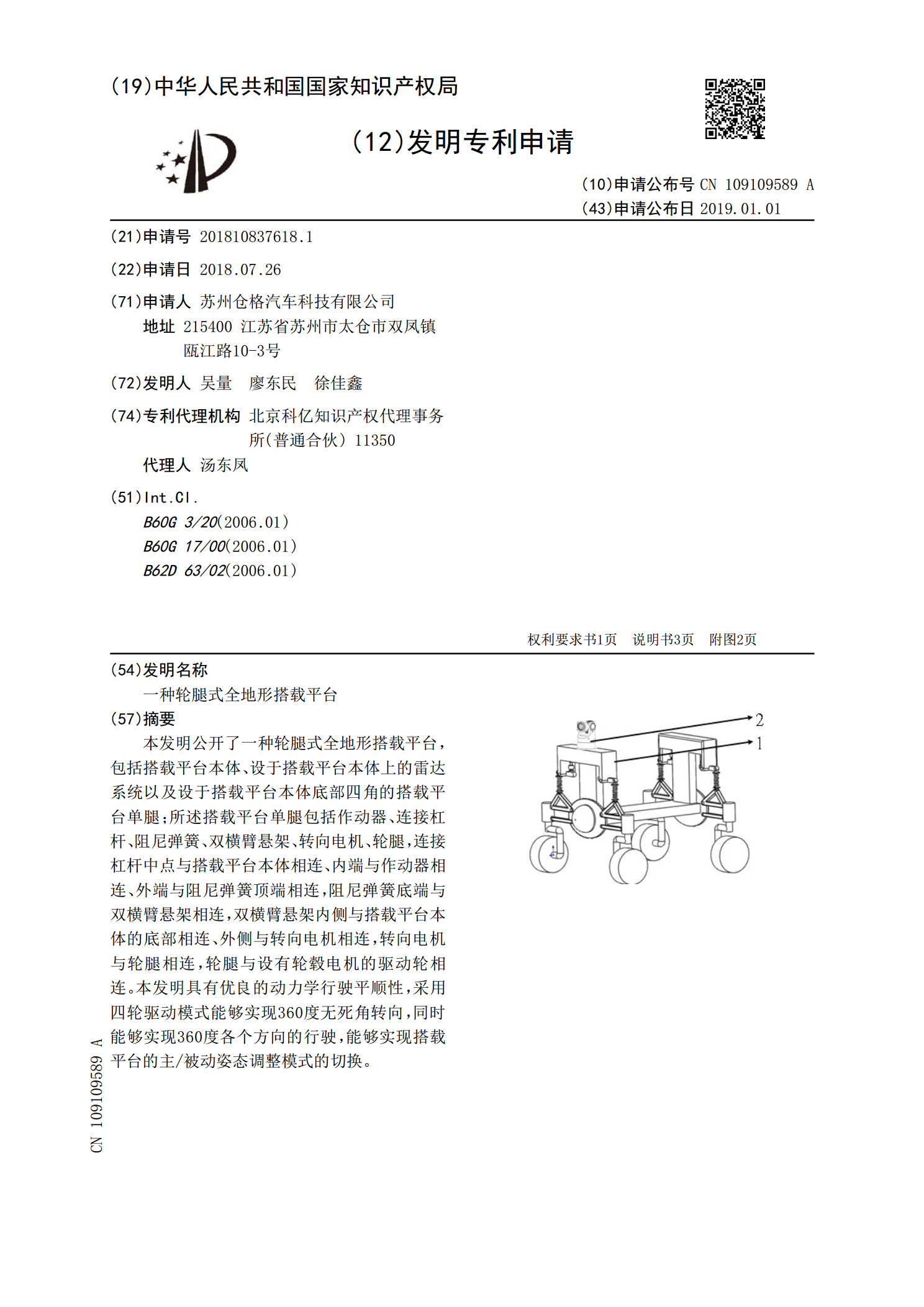
一种轮腿式全地形搭载平台.pdf
本发明公开了一种轮腿式全地形搭载平台,包括搭载平台本体、设于搭载平台本体上的雷达系统以及设于搭载平台本体底部四角的搭载平台单腿;所述搭载平台单腿包括作动器、连接杠杆、阻尼弹簧、双横臂悬架、转向电机、轮腿,连接杠杆中点与搭载平台本体相连、内端与作动器相连、外端与阻尼弹簧顶端相连,阻尼弹簧底端与双横臂悬架相连,双横臂悬架内侧与搭载平台本体的底部相连、外侧与转向电机相连,转向电机与轮腿相连,轮腿与设有轮毂电机的驱动轮相连。本发明具有优良的动力学行驶平顺性,采用四轮驱动模式能够实现360度无死角转向,同时能够实现