
基于同轴式轮腿结构的四轮转向轨迹跟踪控制方法.pdf

冬易****娘子

1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于同轴式轮腿结构的四轮转向轨迹跟踪控制方法.pdf
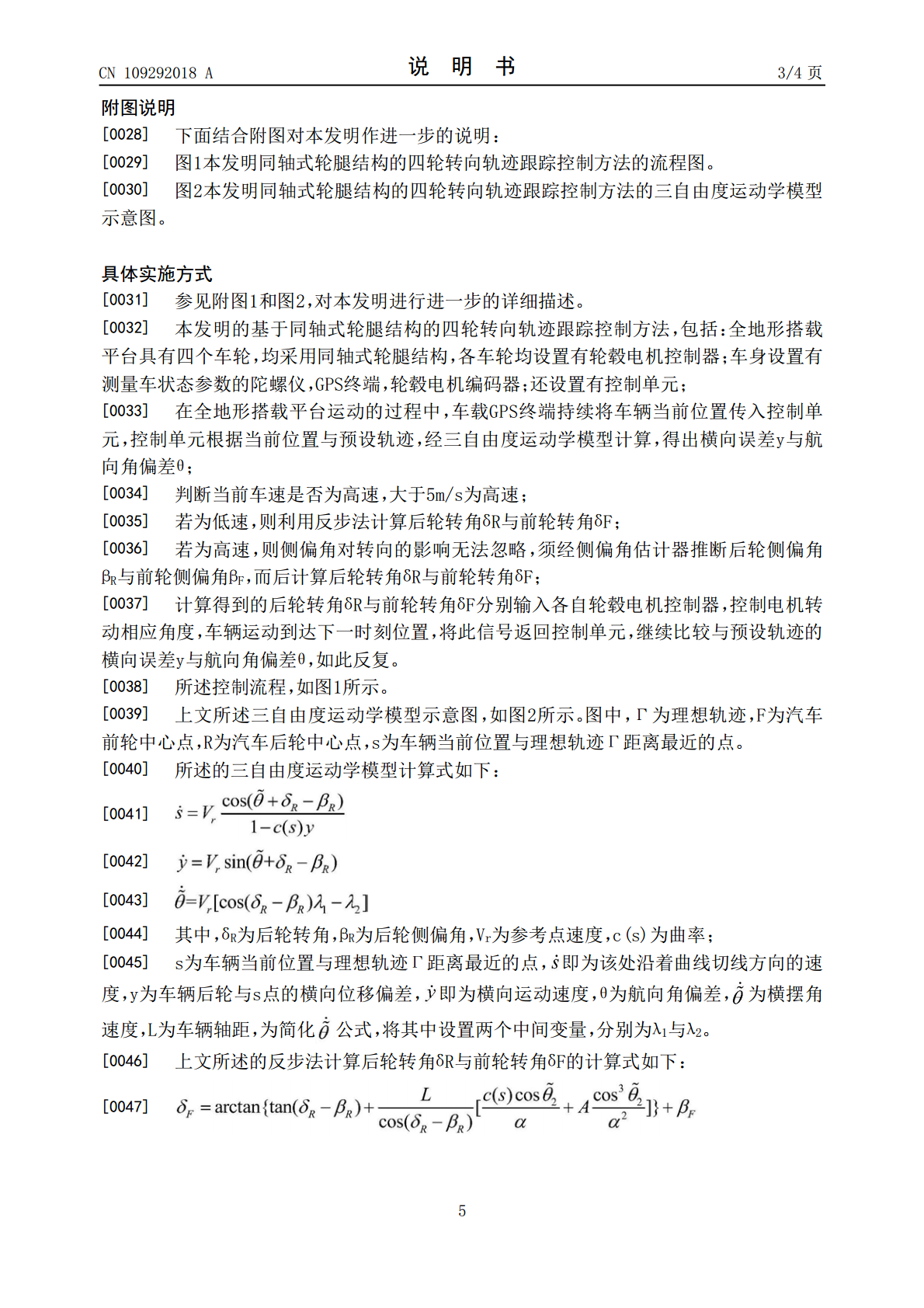
本发明基于同轴式轮腿结构的四轮转向轨迹跟踪控制方法,全地形搭载平台具有四个车轮,均采用同轴式轮腿结构,各车轮均设置有轮毂电机控制器;陀螺仪,GPS终端,轮毂电机编码器,控制单元;GPS终端持续将车辆当前位置传入控制单元,控制单元根据当前位置与预设轨迹,经三自由度运动学模型计算,得出横向误差与航向角偏差;若为低速,则利用反步法计算后轮转角与前轮转角;若为高速,则侧偏角估计器推断后轮侧偏角与前轮侧偏角,而后计算后轮转角与前轮转角;轮毂电机控制器,控制电机转动相应角度,车辆运动到达下一时刻位置,将此信号返回控制
基于同轴式轮腿结构的主动姿态与全轮转向协同控制方法.pdf
本发明基于同轴式轮腿结构全地形搭载平台的主动姿态控制方法,涉及车辆的自动控制领域。当车辆进入弯道时,陀螺仪采集车辆当前的运动状态并将参数传送到控制单元;其中侧向加速度大于门限值时,车辆主动姿态与全轮转向协同系统开始作用,利用车辆质心转移,减小轮胎侧向附着力;当控制单元判断需要主动姿态调节介入时,将调用最优质心位置控制器计算得到此刻质心最佳位置,控制大臂举升电机调节质心位置,而后经由车辆动力学模型得出相应的转向角控制车轮转向;在新一时刻,陀螺仪再次回传车辆状态至控制单元,车辆侧向加速度判断门限值,如此往复,
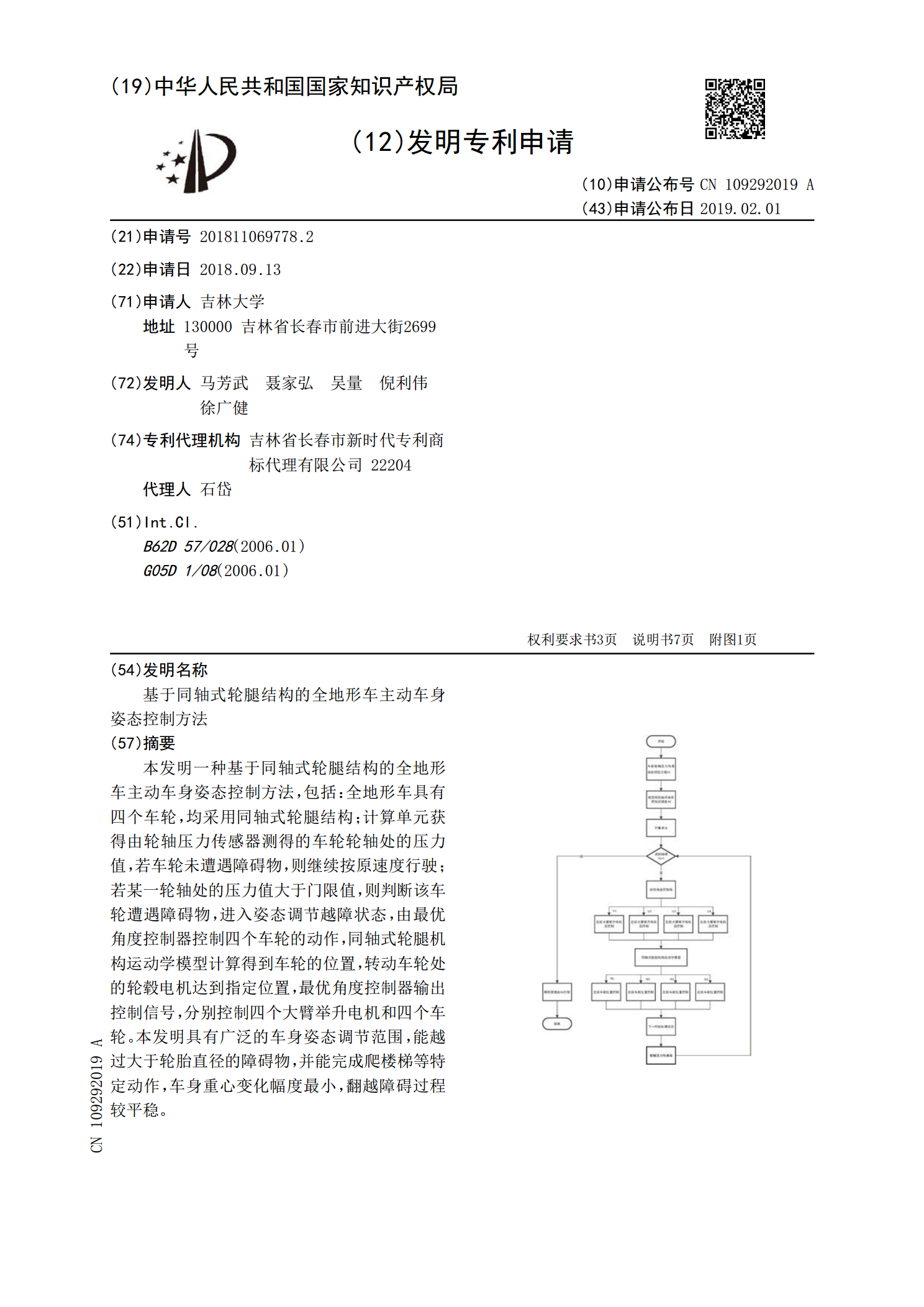
基于同轴式轮腿结构的全地形车主动车身姿态控制方法.pdf
本发明一种基于同轴式轮腿结构的全地形车主动车身姿态控制方法,包括:全地形车具有四个车轮,均采用同轴式轮腿结构;计算单元获得由轮轴压力传感器测得的车轮轮轴处的压力值,若车轮未遭遇障碍物,则继续按原速度行驶;若某一轮轴处的压力值大于门限值,则判断该车轮遭遇障碍物,进入姿态调节越障状态,由最优角度控制器控制四个车轮的动作,同轴式轮腿机构运动学模型计算得到车轮的位置,转动车轮处的轮毂电机达到指定位置,最优角度控制器输出控制信号,分别控制四个大臂举升电机和四个车轮。本发明具有广泛的车身姿态调节范围,能越过大于轮胎直
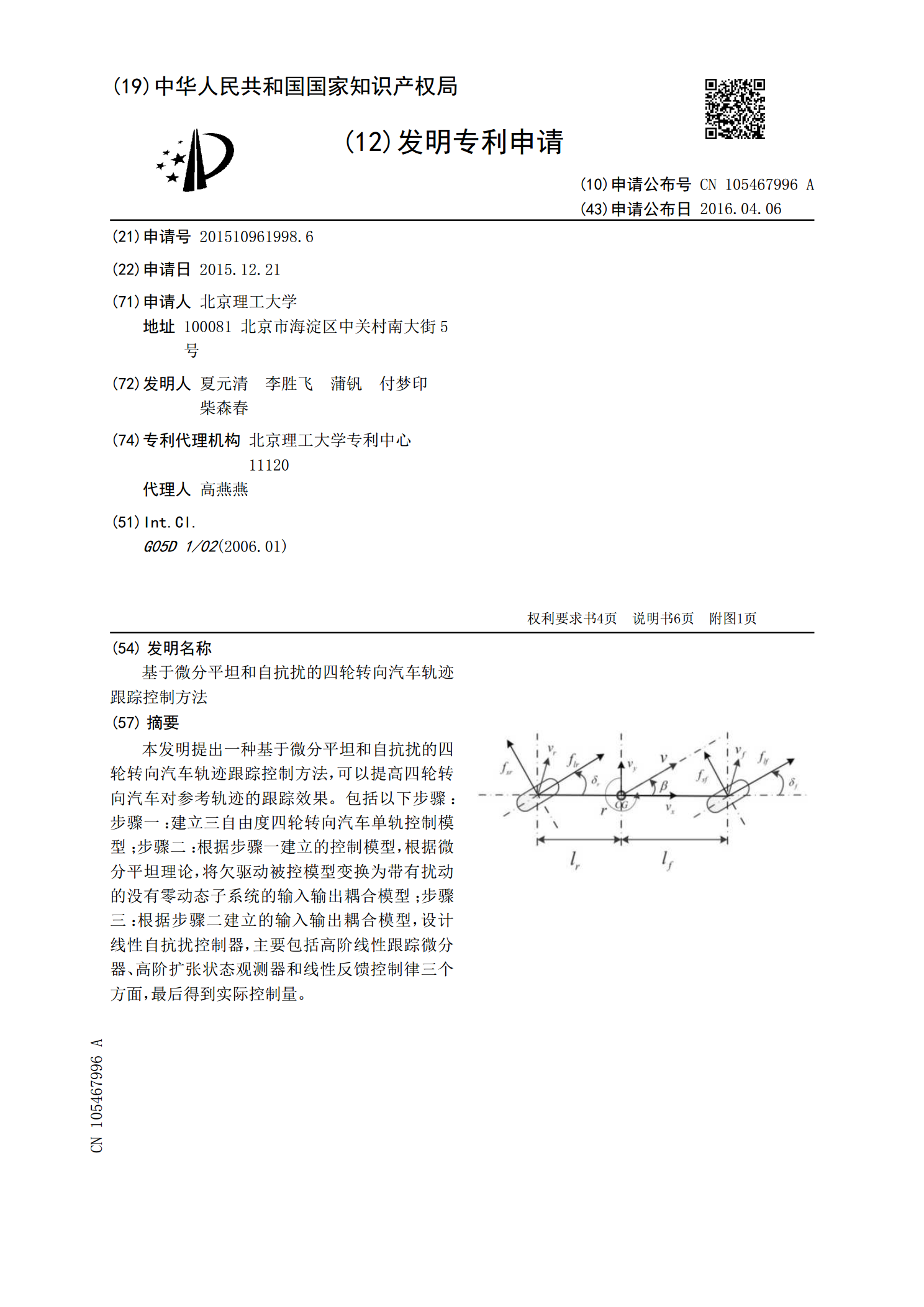
基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法.pdf
本发明提出一种基于微分平坦和自抗扰的四轮转向汽车轨迹跟踪控制方法,可以提高四轮转向汽车对参考轨迹的跟踪效果。包括以下步骤:步骤一:建立三自由度四轮转向汽车单轨控制模型;步骤二:根据步骤一建立的控制模型,根据微分平坦理论,将欠驱动被控模型变换为带有扰动的没有零动态子系统的输入输出耦合模型;步骤三:根据步骤二建立的输入输出耦合模型,设计线性自抗扰控制器,主要包括高阶线性跟踪微分器、高阶扩张状态观测器和线性反馈控制律三个方面,最后得到实际控制量。
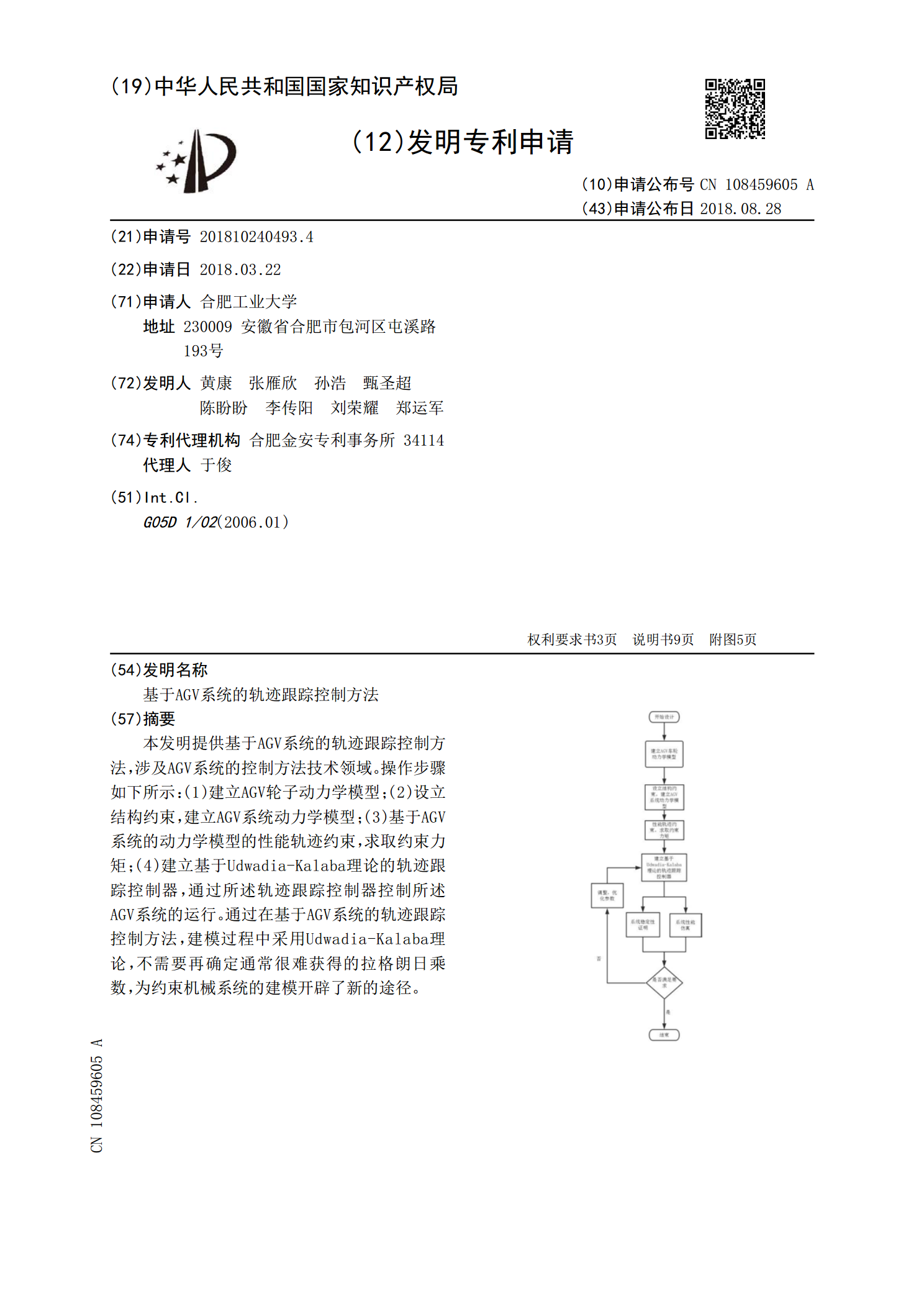
基于AGV系统的轨迹跟踪控制方法.pdf
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径