
一种机器人手臂灵活度检测装置.pdf

诗文****仙女


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
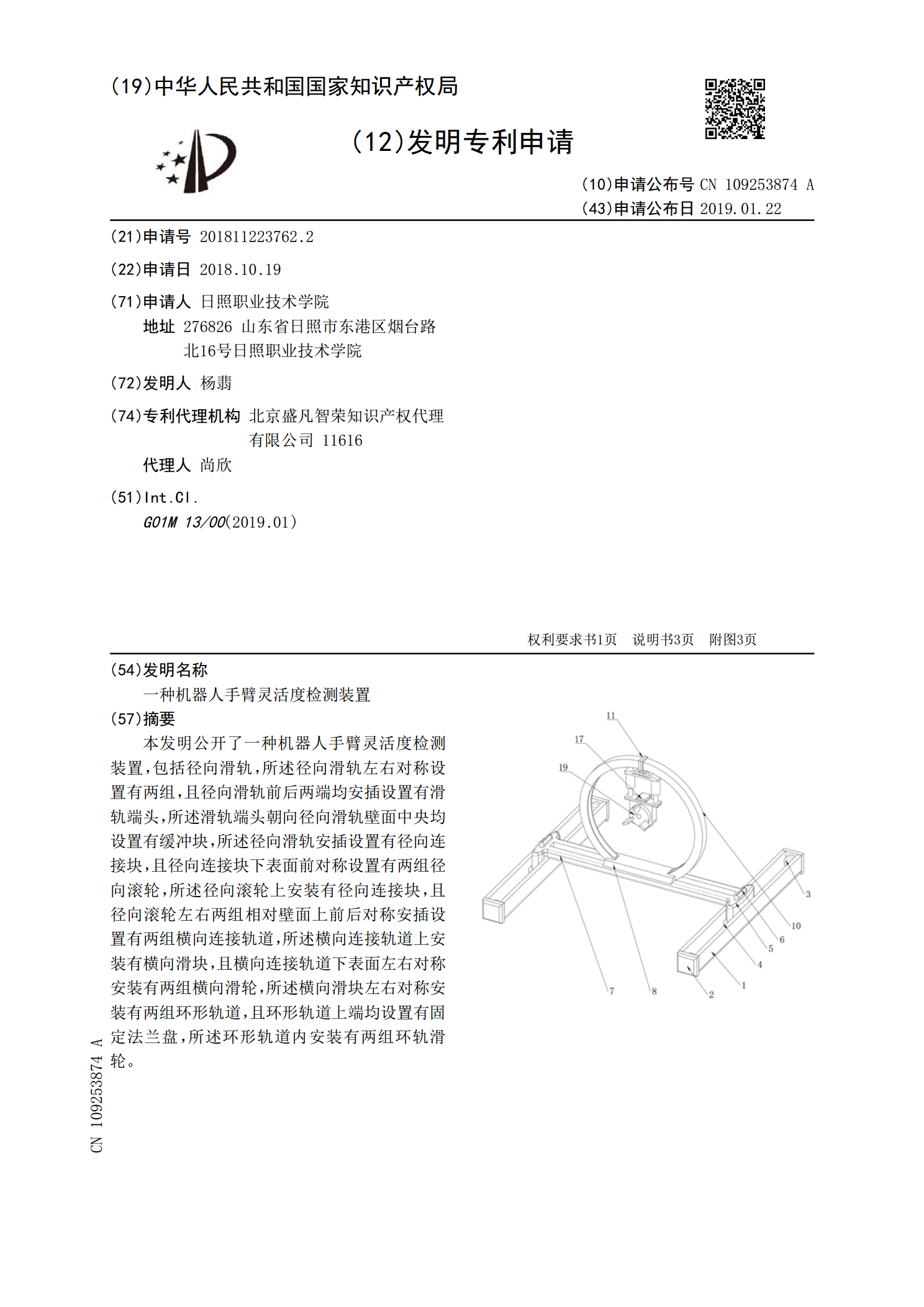
一种机器人手臂灵活度检测装置.pdf
本发明公开了一种机器人手臂灵活度检测装置,包括径向滑轨,所述径向滑轨左右对称设置有两组,且径向滑轨前后两端均安插设置有滑轨端头,所述滑轨端头朝向径向滑轨壁面中央均设置有缓冲块,所述径向滑轨安插设置有径向连接块,且径向连接块下表面前对称设置有两组径向滚轮,所述径向滚轮上安装有径向连接块,且径向滚轮左右两组相对壁面上前后对称安插设置有两组横向连接轨道,所述横向连接轨道上安装有横向滑块,且横向连接轨道下表面左右对称安装有两组横向滑轮,所述横向滑块左右对称安装有两组环形轨道,且环形轨道上端均设置有固定法兰盘,所述

一种喷漆机器人手臂装置.pdf
本发明公开了一种喷漆机器人手臂装置,包括底座、机壳和气缸,所述底座下部通过轴承连接有万向轮,所述底座上部通过焊接固定有配重块,所述底座上部通过焊接固定有机壳,所述机壳内部安装有气泵,所述气泵左部安装有进气口,所述远离配重块的一侧安装有处理器,所述处理器左侧安装有操作面板,所述机壳上部安装有气缸,所述气缸内部安装有可伸缩弹簧,所述气缸上部安装有旋转器,所述旋转器右侧安装有驱动电机,所述驱动电机右侧安装有横管,所述横管上部安装有进漆管,所述进漆管右侧安装有调节旋钮,该装置不会体积的大小而限制操作,使用范围广、

一种碳刷架弹簧的灵活度检测装置.pdf
本发明公开了一种碳刷架弹簧的灵活度检测装置,包括:固定座,其上设置有驱动机构、及由驱动机构带动转动的传送齿轮;滑块,其置于所述固定座的一侧,所述滑块上设置有齿条,所述齿条与所述传送齿轮配合传动,所述滑块的下方设置有与所述滑块配合滑动的导轨;压块,其并排置于所述滑块的一端,所述压块固接于导块上,所述导块与所述导轨配合滑动,所述压块上设置有压头,所述压块与滑块之间设置有压力传感器,所述压力传感器的一端固接于所述压块上,所述压力传感器的另一端固接于所述滑块上。该检测装置安全可靠、高效便捷,可对碳刷组件中的弹簧进
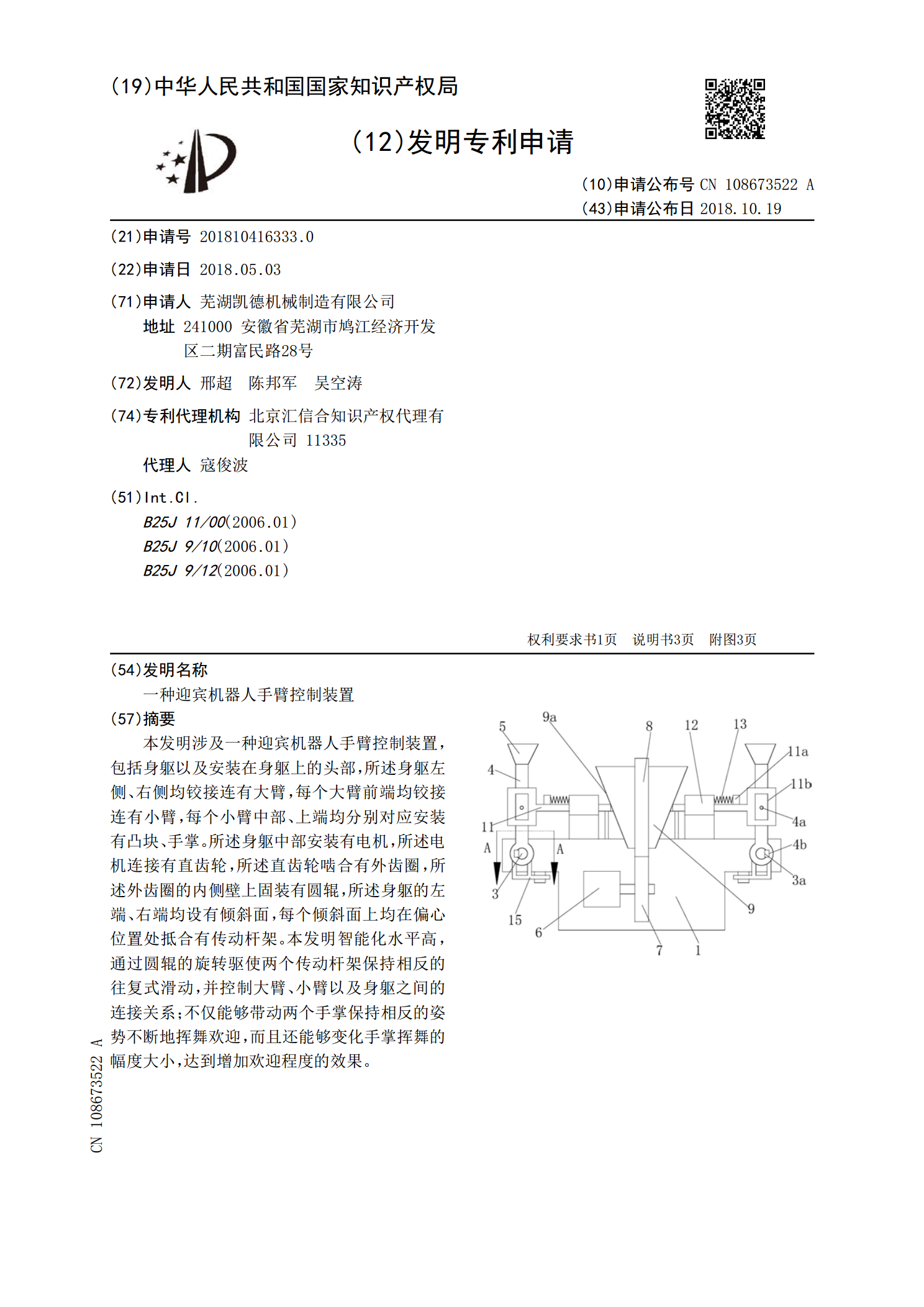
一种迎宾机器人手臂控制装置.pdf
本发明涉及一种迎宾机器人手臂控制装置,包括身躯以及安装在身躯上的头部,所述身躯左侧、右侧均铰接连有大臂,每个大臂前端均铰接连有小臂,每个小臂中部、上端均分别对应安装有凸块、手掌。所述身躯中部安装有电机,所述电机连接有直齿轮,所述直齿轮啮合有外齿圈,所述外齿圈的内侧壁上固装有圆辊,所述身躯的左端、右端均设有倾斜面,每个倾斜面上均在偏心位置处抵合有传动杆架。本发明智能化水平高,通过圆辊的旋转驱使两个传动杆架保持相反的往复式滑动,并控制大臂、小臂以及身躯之间的连接关系;不仅能够带动两个手掌保持相反的姿势不断地挥
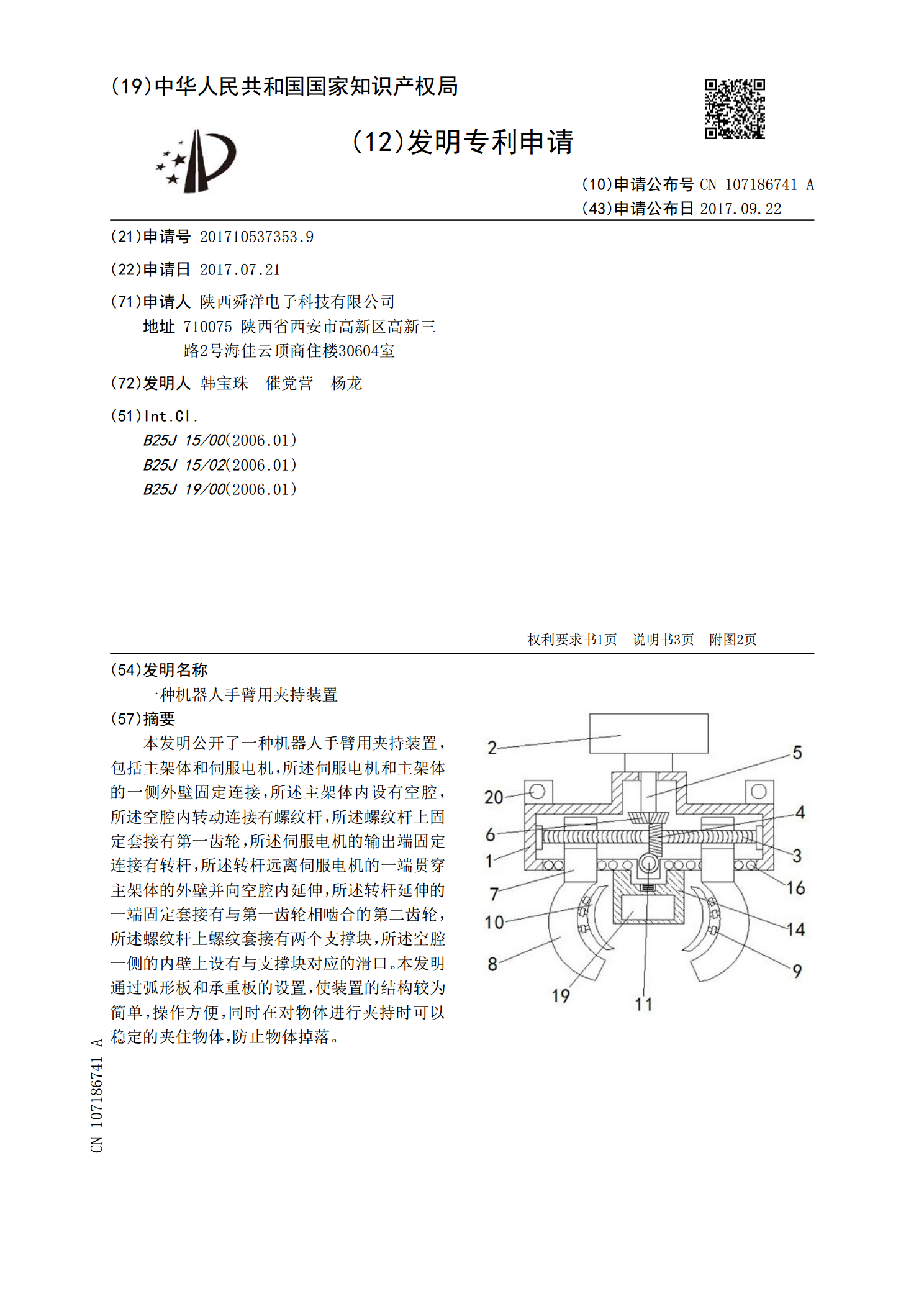
一种机器人手臂用夹持装置.pdf
本发明公开了一种机器人手臂用夹持装置,包括主架体和伺服电机,所述伺服电机和主架体的一侧外壁固定连接,所述主架体内设有空腔,所述空腔内转动连接有螺纹杆,所述螺纹杆上固定套接有第一齿轮,所述伺服电机的输出端固定连接有转杆,所述转杆远离伺服电机的一端贯穿主架体的外壁并向空腔内延伸,所述转杆延伸的一端固定套接有与第一齿轮相啮合的第二齿轮,所述螺纹杆上螺纹套接有两个支撑块,所述空腔一侧的内壁上设有与支撑块对应的滑口。本发明通过弧形板和承重板的设置,使装置的结构较为简单,操作方便,同时在对物体进行夹持时可以稳定的夹住