
适用于主动/被动送线模式的张力控制器及其控制方法.pdf

睿德****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
适用于主动/被动送线模式的张力控制器及其控制方法.pdf
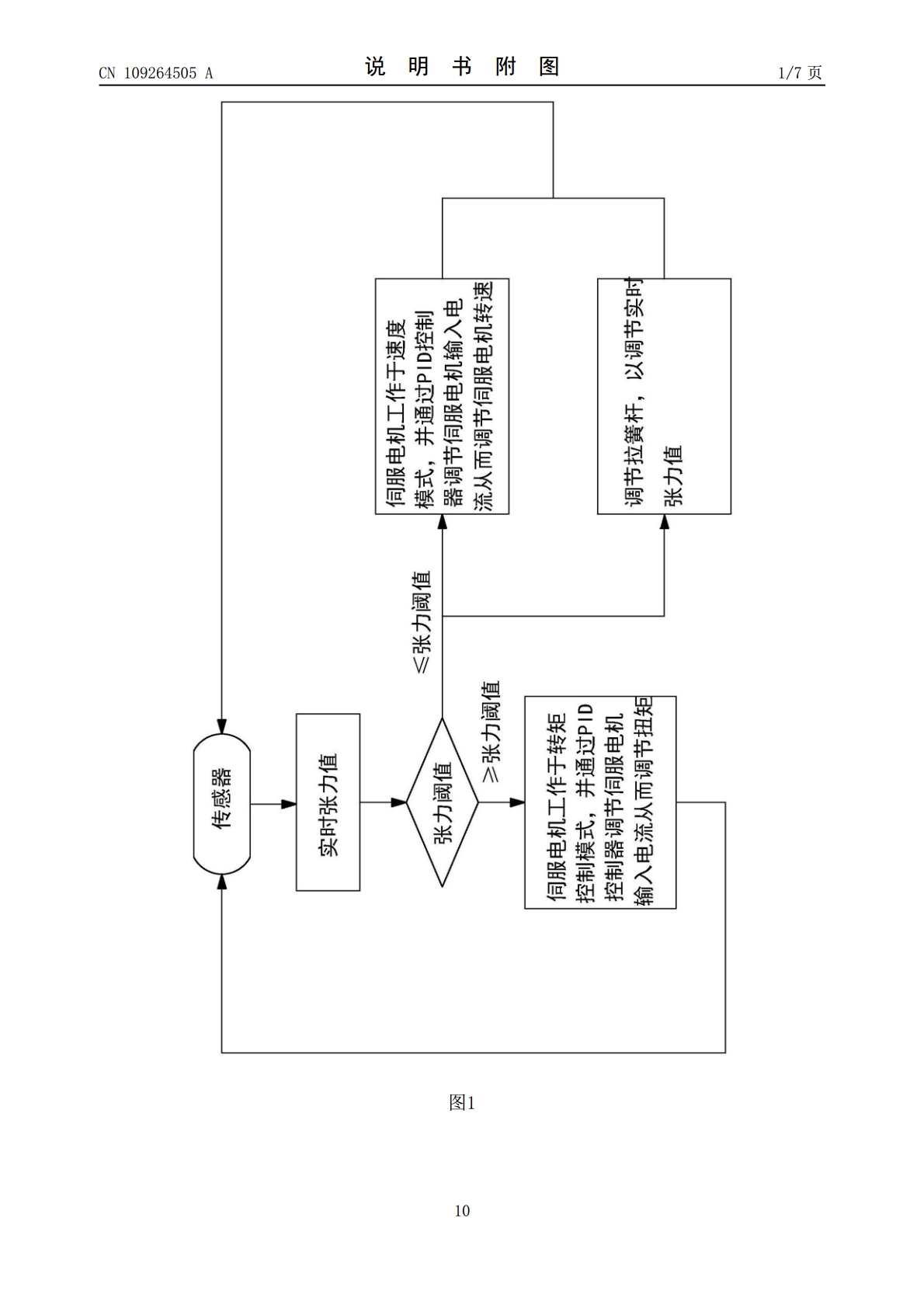
一种适用于主动/被动送线模式的张力控制器及其控制方法,包括一基板及张力设定控制器,所述基板上设置有张力线轮和张力调节机构;其特征在于:还包括伺服电机及张力传感器,对应于该伺服电机设置有PID控制器;所述张力线轮的转轴与所述伺服电机的输出轴传动连接;所述张力传感器的信号输出端与伺服电机驱动控制器的信号输入端电连接;通过所述张力设定控制器预设张力阈值;当所述张力传感器采集到的实时张力值大于或等于所述张力阈值时,所述伺服电机驱动控制器控制伺服电机工作在转矩控制模式;当所述张力传感器采集到的实时张力值小于或等于所
一种绕线机同步主动送线张力控制系统.pdf
本发明涉及一种绕线机,具体为一种绕线机同步主动送线张力控制系统。其特征在于:在张力杆与张力弹簧的连接端设置角度电位器,角度电位器的信号输出端连接绕线机的主控制器,在过线机构中设置有主动送线轮,该主动送线轮连接送线电机,送线电机与绕线机的主控制器相连;所述的主控制器的工作程序采用C语言编制,主控制器采集角度电位器的角度信号,经主控制器处理后输出控制信号控制送线电机工作。本发明的张力器采用非接触式光学角度电位器、由直流无刷送线电机控制的主动送线轮及自适应的PID算法,使张力器的线速度达20米/秒,可绕线径范围
主动可调式线控制动系统及其控制方法.pdf
本发明公开了一种主动可调式线控制动系统、控制方法、存储介质及终端,包括踏板感比例控制阀和主控制器,主控制器被设置为设定踏板力‑电流特性表和踏板行程‑踏板力特性表,踏板力‑电流特性表用于设定踏板力和电流的转换比例,踏板行程‑踏板力特性表用于设定踏板行程和踏板力的转换比例;踏板感比例控制阀包括依次设置的压力反馈腔、调压腔、弹簧预紧腔和比例电磁铁;调压腔通过模拟器控制阀连接制动主缸;踏板感比例控制阀被设置为根据踏板行程‑踏板力特性表确定目标踏板力。本发明通过踏板模拟器电子控制单元任意设定踏板感,利用踏板感比例控
一种主动送线装置及其控制方法.pdf
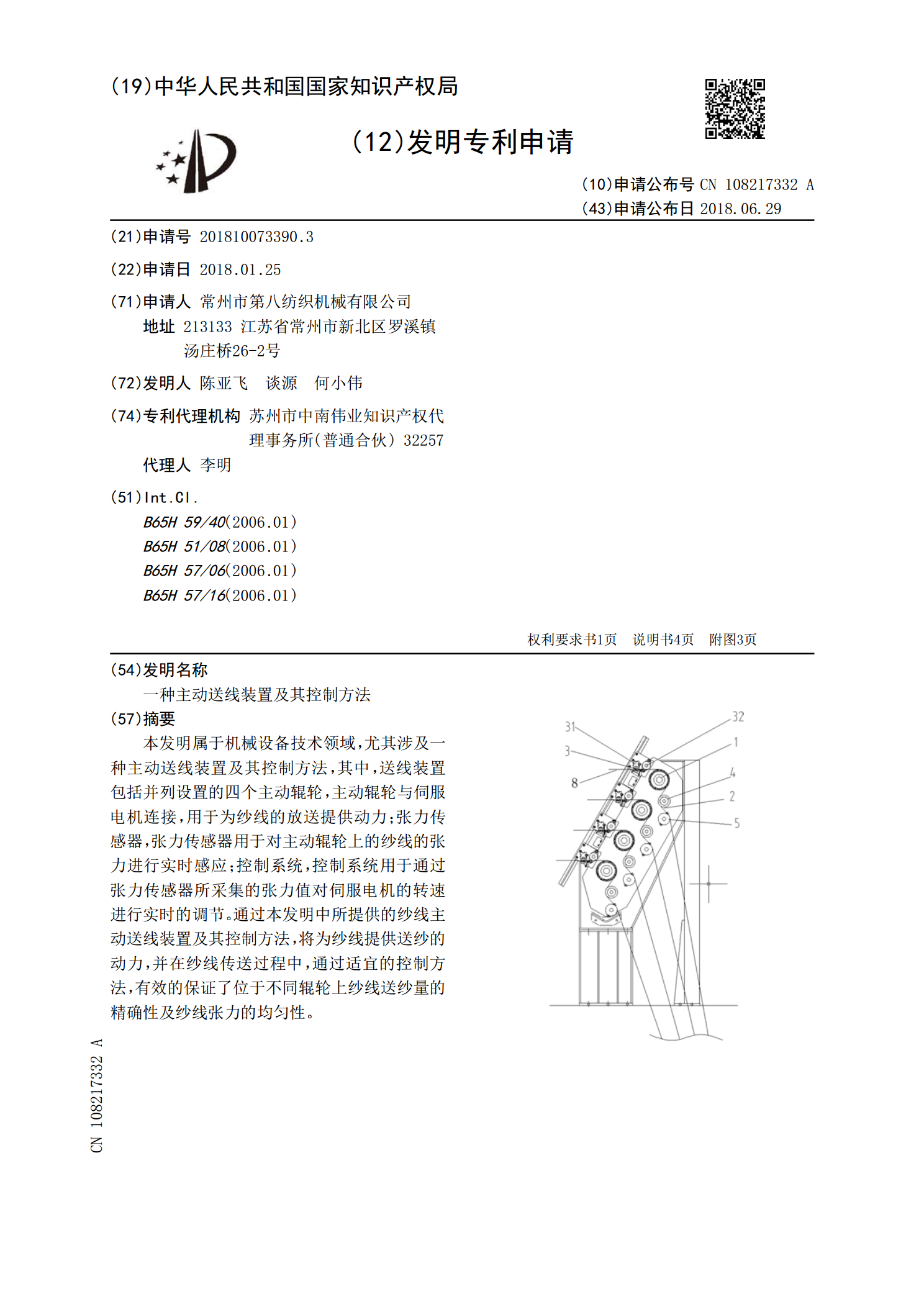
本发明属于机械设备技术领域,尤其涉及一种主动送线装置及其控制方法,其中,送线装置包括并列设置的四个主动辊轮,主动辊轮与伺服电机连接,用于为纱线的放送提供动力;张力传感器,张力传感器用于对主动辊轮上的纱线的张力进行实时感应;控制系统,控制系统用于通过张力传感器所采集的张力值对伺服电机的转速进行实时的调节。通过本发明中所提供的纱线主动送线装置及其控制方法,将为纱线提供送纱的动力,并在纱线传送过程中,通过适宜的控制方法,有效的保证了位于不同辊轮上纱线送纱量的精确性及纱线张力的均匀性。
集被动、半主动和主动控制为一体的高效新能源振动控制器.pdf
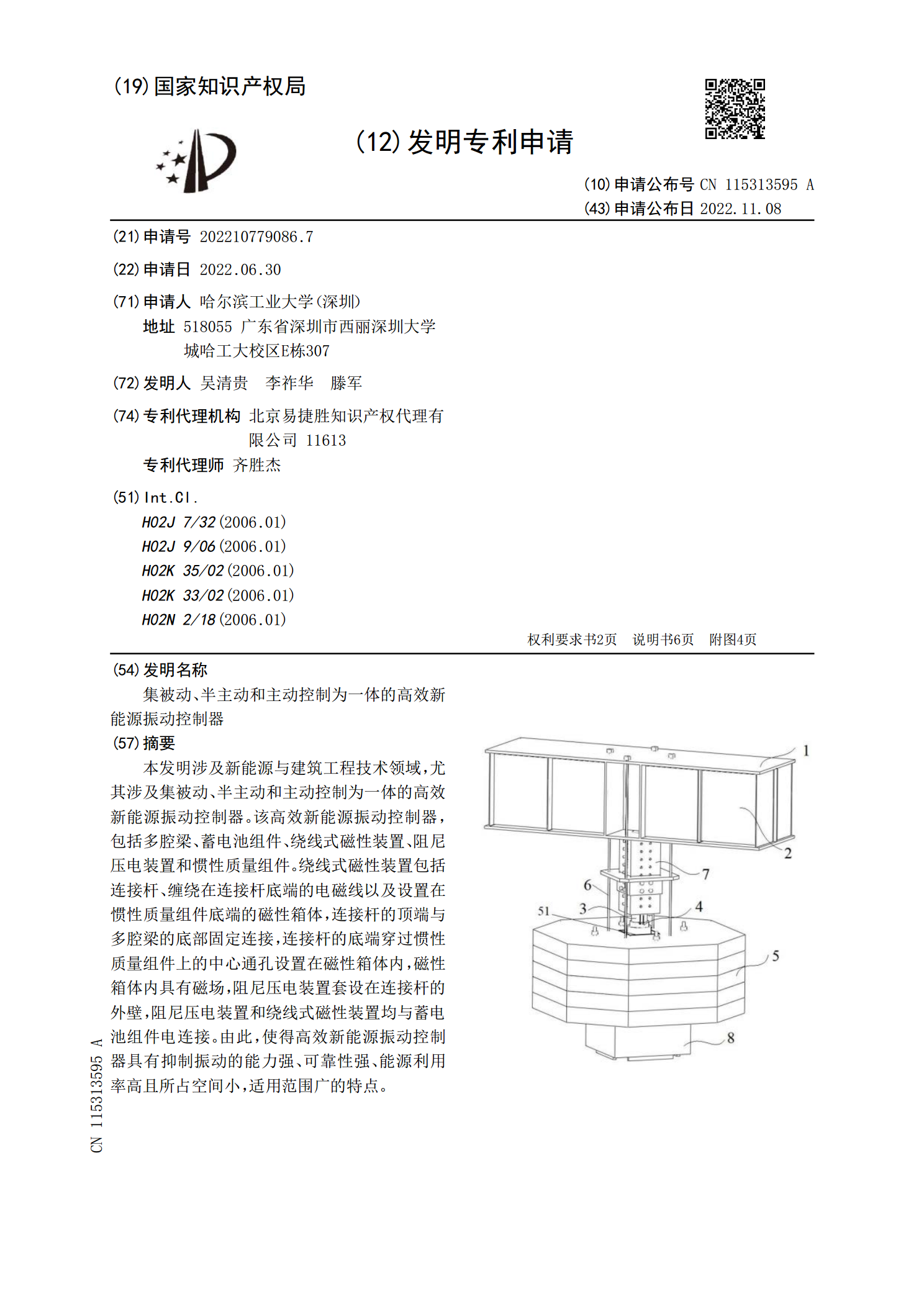
本发明涉及新能源与建筑工程技术领域,尤其涉及集被动、半主动和主动控制为一体的高效新能源振动控制器。该高效新能源振动控制器,包括多腔梁、蓄电池组件、绕线式磁性装置、阻尼压电装置和惯性质量组件。绕线式磁性装置包括连接杆、缠绕在连接杆底端的电磁线以及设置在惯性质量组件底端的磁性箱体,连接杆的顶端与多腔梁的底部固定连接,连接杆的底端穿过惯性质量组件上的中心通孔设置在磁性箱体内,磁性箱体内具有磁场,阻尼压电装置套设在连接杆的外壁,阻尼压电装置和绕线式磁性装置均与蓄电池组件电连接。由此,使得高效新能源振动控制器具有抑