
一种绕线机同步主动送线张力控制系统.pdf

康佳****文库


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绕线机同步主动送线张力控制系统.pdf
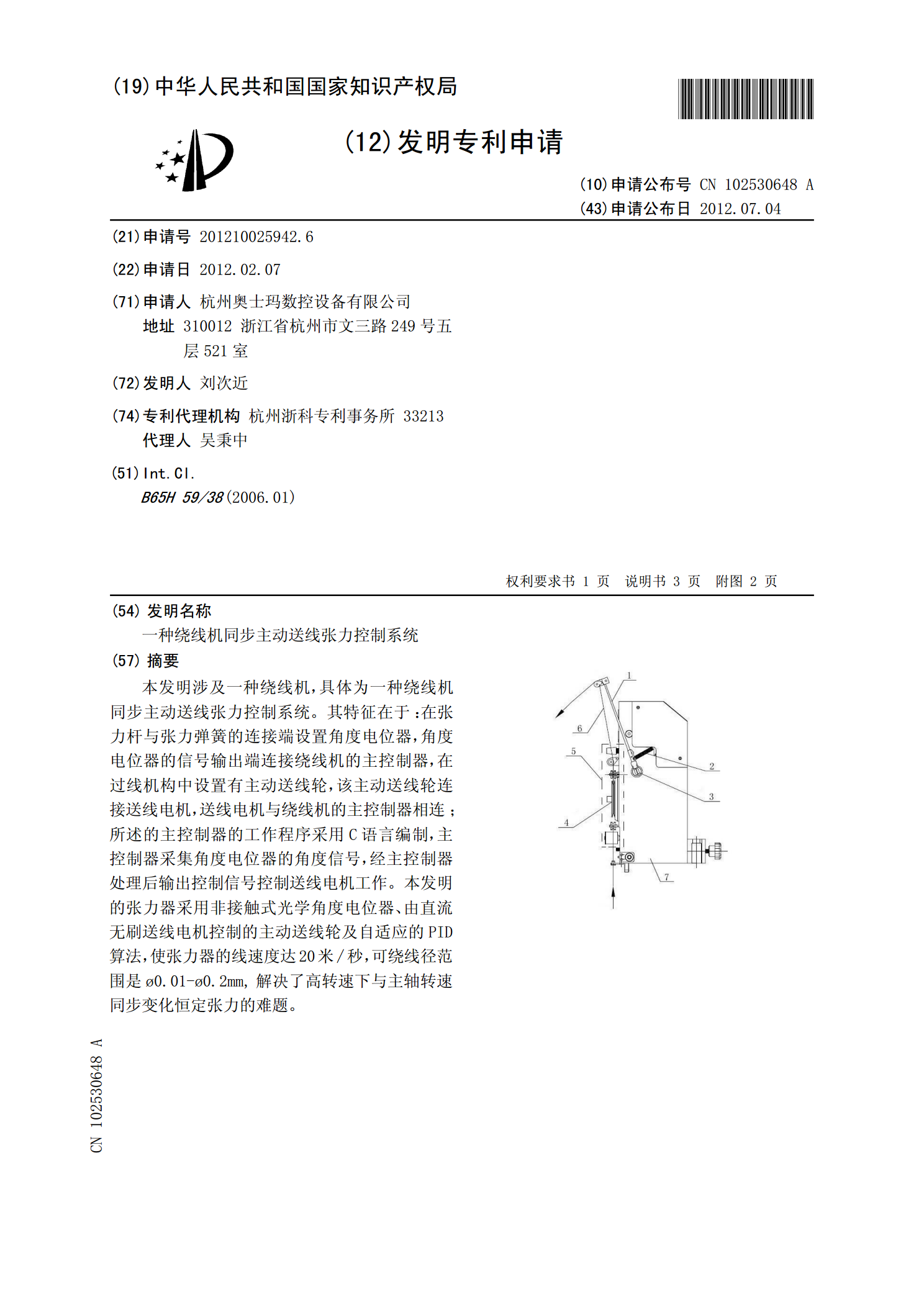
本发明涉及一种绕线机,具体为一种绕线机同步主动送线张力控制系统。其特征在于:在张力杆与张力弹簧的连接端设置角度电位器,角度电位器的信号输出端连接绕线机的主控制器,在过线机构中设置有主动送线轮,该主动送线轮连接送线电机,送线电机与绕线机的主控制器相连;所述的主控制器的工作程序采用C语言编制,主控制器采集角度电位器的角度信号,经主控制器处理后输出控制信号控制送线电机工作。本发明的张力器采用非接触式光学角度电位器、由直流无刷送线电机控制的主动送线轮及自适应的PID算法,使张力器的线速度达20米/秒,可绕线径范围
一种张力自调整的绕线机张力机构.pdf
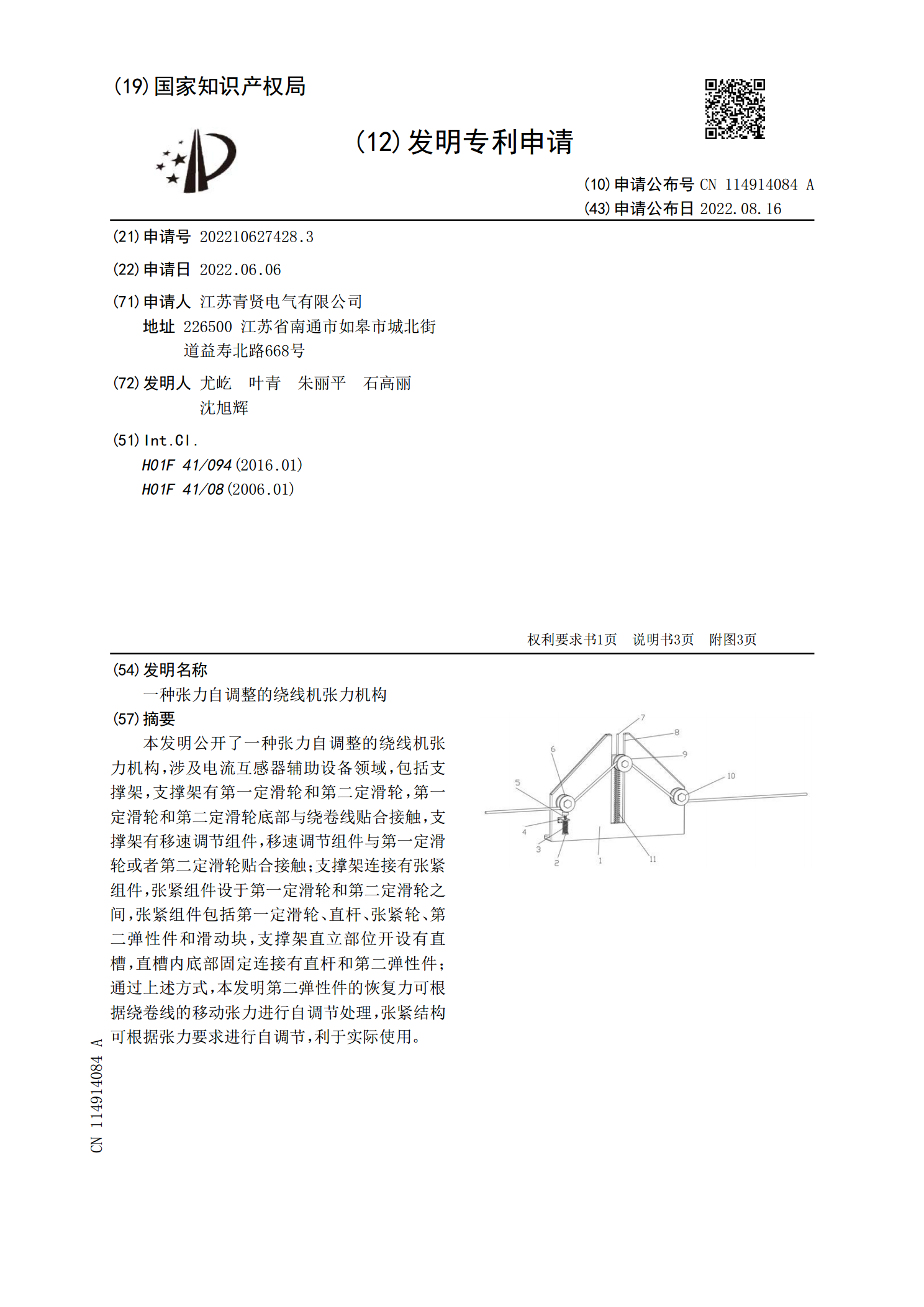
本发明公开了一种张力自调整的绕线机张力机构,涉及电流互感器辅助设备领域,包括支撑架,支撑架有第一定滑轮和第二定滑轮,第一定滑轮和第二定滑轮底部与绕卷线贴合接触,支撑架有移速调节组件,移速调节组件与第一定滑轮或者第二定滑轮贴合接触;支撑架连接有张紧组件,张紧组件设于第一定滑轮和第二定滑轮之间,张紧组件包括第一定滑轮、直杆、张紧轮、第二弹性件和滑动块,支撑架直立部位开设有直槽,直槽内底部固定连接有直杆和第二弹性件;通过上述方式,本发明第二弹性件的恢复力可根据绕卷线的移动张力进行自调节处理,张紧结构可根据张力要
一种绣花机绣线张力控制系统、方法.pdf
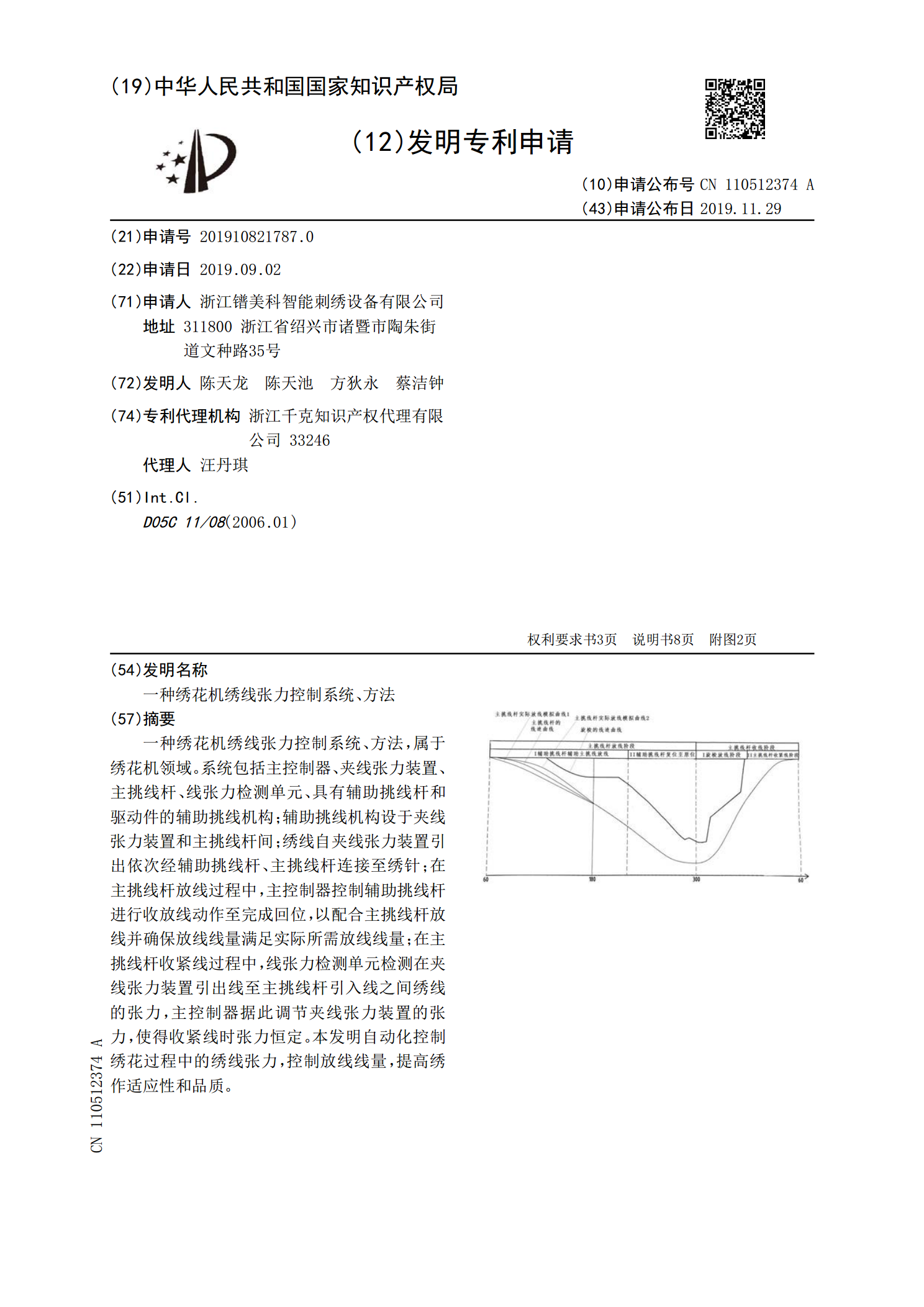
一种绣花机绣线张力控制系统、方法,属于绣花机领域。系统包括主控制器、夹线张力装置、主挑线杆、线张力检测单元、具有辅助挑线杆和驱动件的辅助挑线机构;辅助挑线机构设于夹线张力装置和主挑线杆间;绣线自夹线张力装置引出依次经辅助挑线杆、主挑线杆连接至绣针;在主挑线杆放线过程中,主控制器控制辅助挑线杆进行收放线动作至完成回位,以配合主挑线杆放线并确保放线线量满足实际所需放线线量;在主挑线杆收紧线过程中,线张力检测单元检测在夹线张力装置引出线至主挑线杆引入线之间绣线的张力,主控制器据此调节夹线张力装置的张力,使得收紧
适用于主动/被动送线模式的张力控制器及其控制方法.pdf
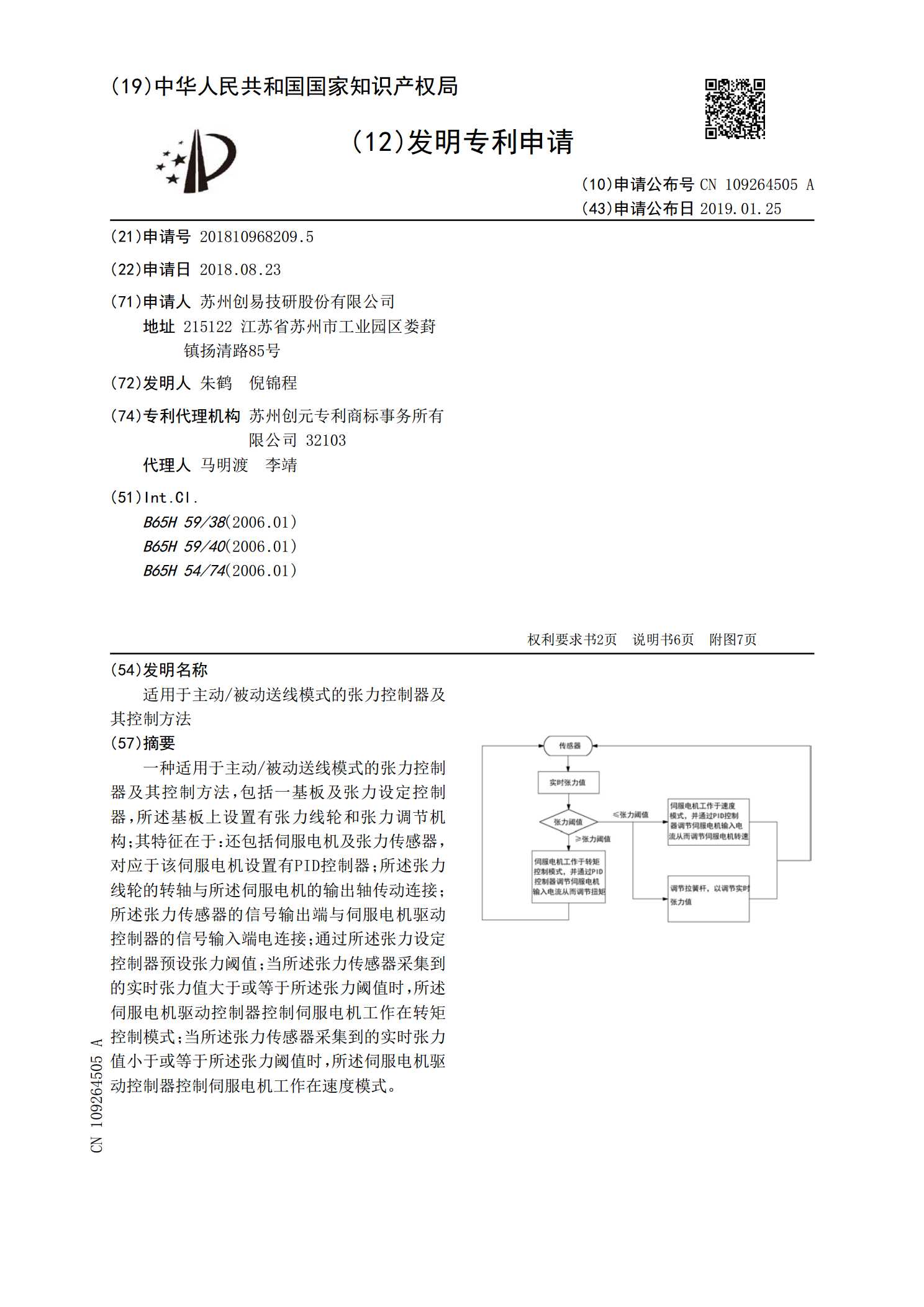
一种适用于主动/被动送线模式的张力控制器及其控制方法,包括一基板及张力设定控制器,所述基板上设置有张力线轮和张力调节机构;其特征在于:还包括伺服电机及张力传感器,对应于该伺服电机设置有PID控制器;所述张力线轮的转轴与所述伺服电机的输出轴传动连接;所述张力传感器的信号输出端与伺服电机驱动控制器的信号输入端电连接;通过所述张力设定控制器预设张力阈值;当所述张力传感器采集到的实时张力值大于或等于所述张力阈值时,所述伺服电机驱动控制器控制伺服电机工作在转矩控制模式;当所述张力传感器采集到的实时张力值小于或等于所
一种电缆绝缘套挤包线张力控制系统.pdf
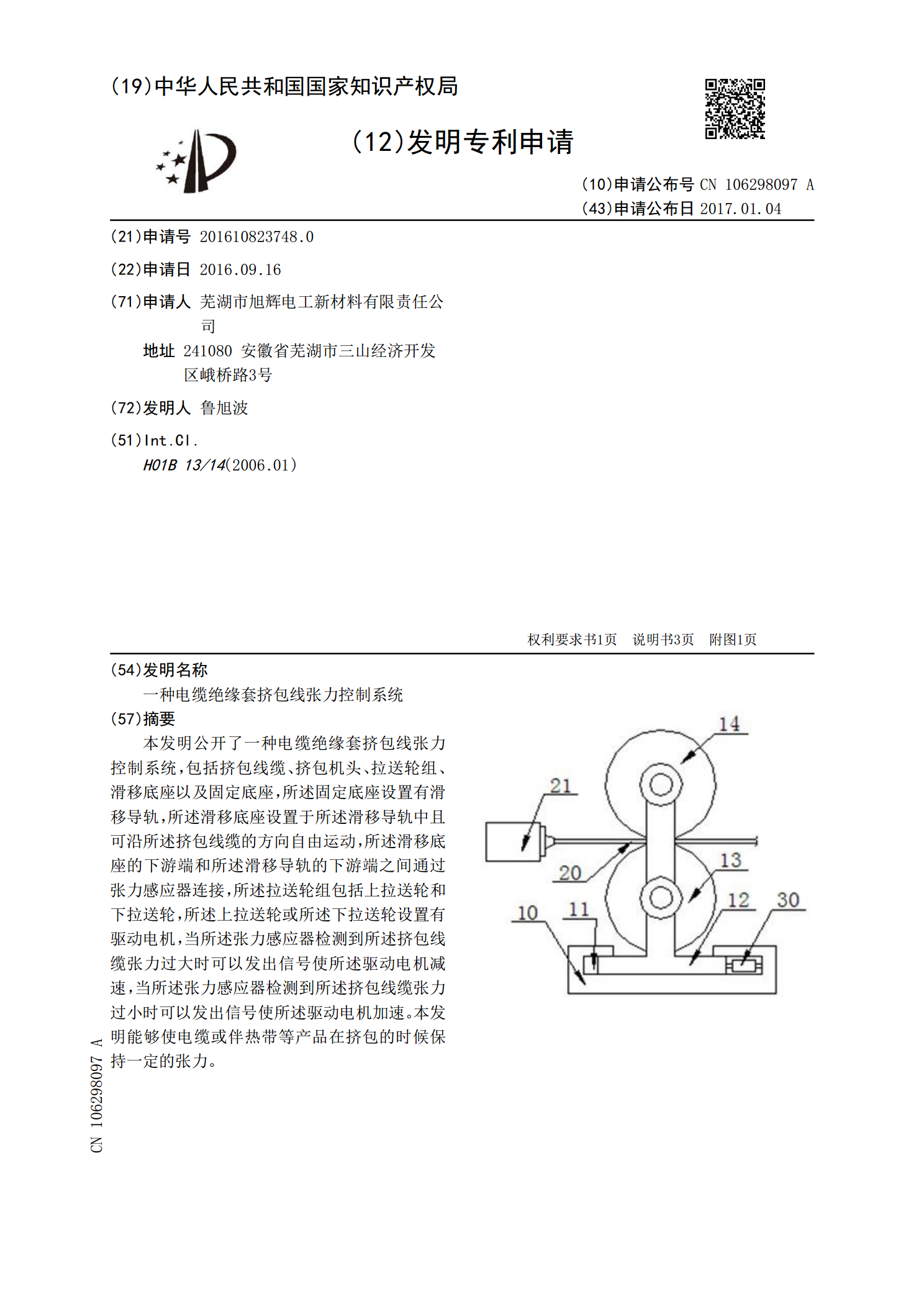
本发明公开了一种电缆绝缘套挤包线张力控制系统,包括挤包线缆、挤包机头、拉送轮组、滑移底座以及固定底座,所述固定底座设置有滑移导轨,所述滑移底座设置于所述滑移导轨中且可沿所述挤包线缆的方向自由运动,所述滑移底座的下游端和所述滑移导轨的下游端之间通过张力感应器连接,所述拉送轮组包括上拉送轮和下拉送轮,所述上拉送轮或所述下拉送轮设置有驱动电机,当所述张力感应器检测到所述挤包线缆张力过大时可以发出信号使所述驱动电机减速,当所述张力感应器检测到所述挤包线缆张力过小时可以发出信号使所述驱动电机加速。本发明能够使电缆或