
一种车辆泊车方法及其泊车系统.pdf

小云****66

1/10
2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆泊车方法及其泊车系统.pdf
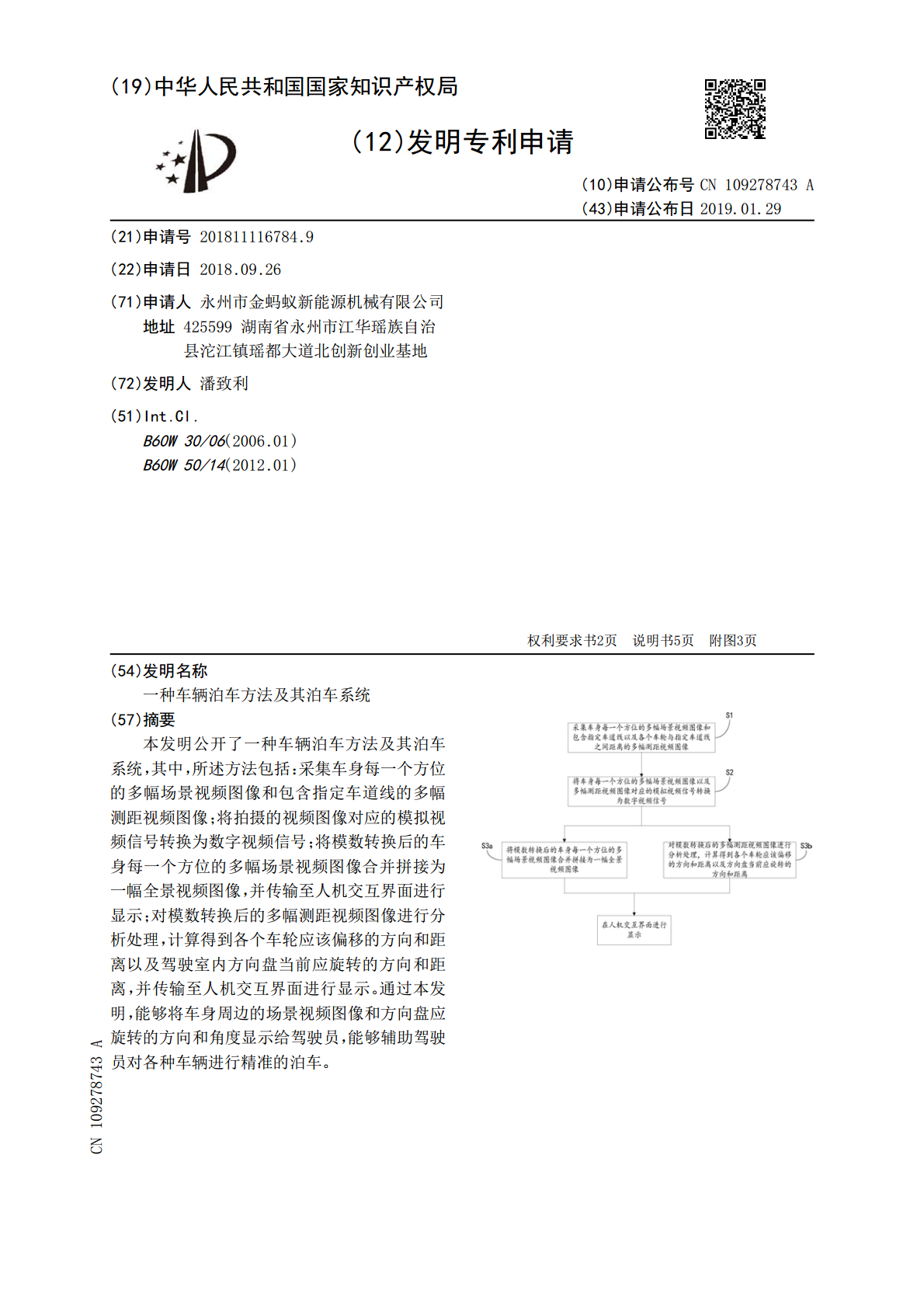
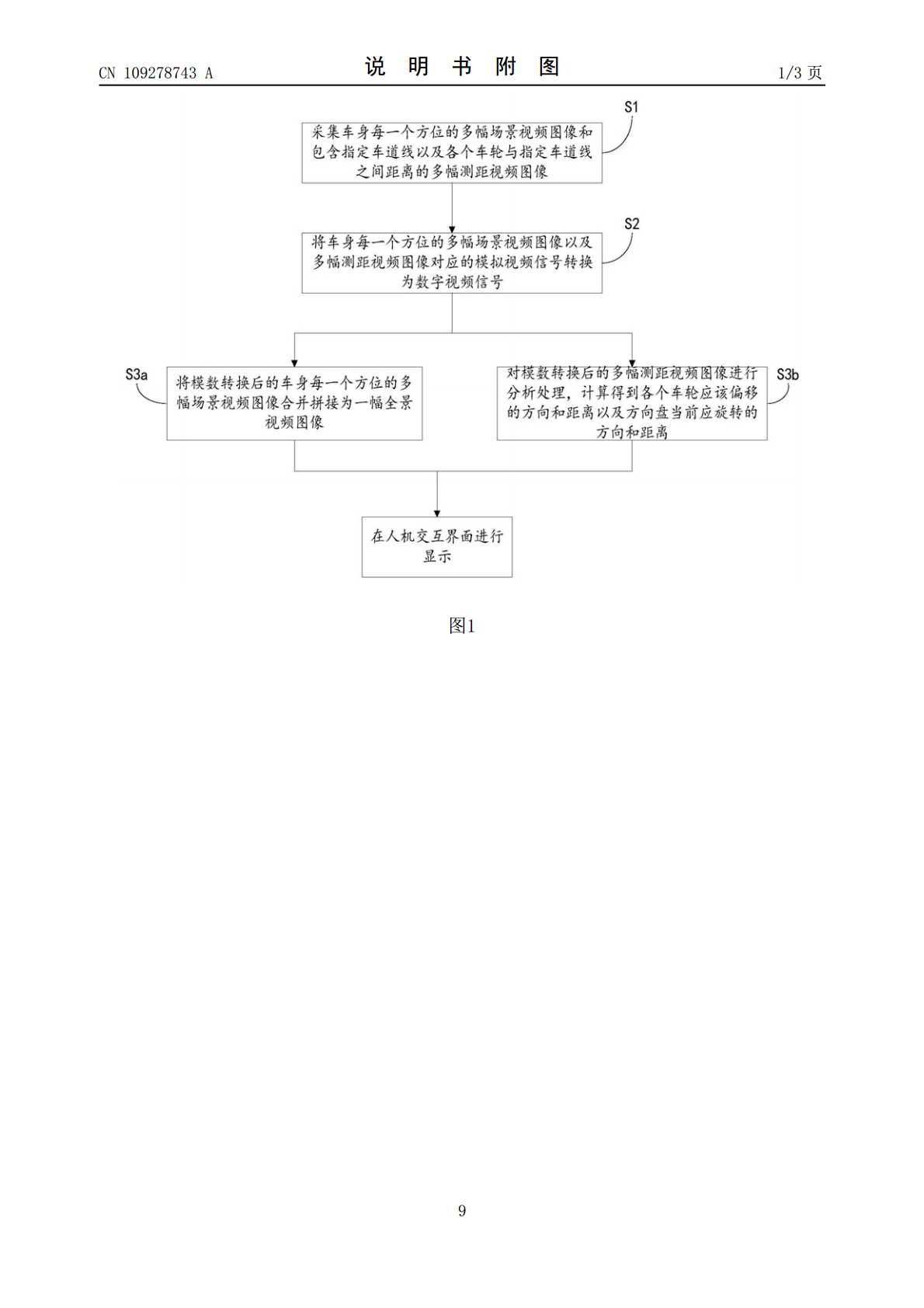
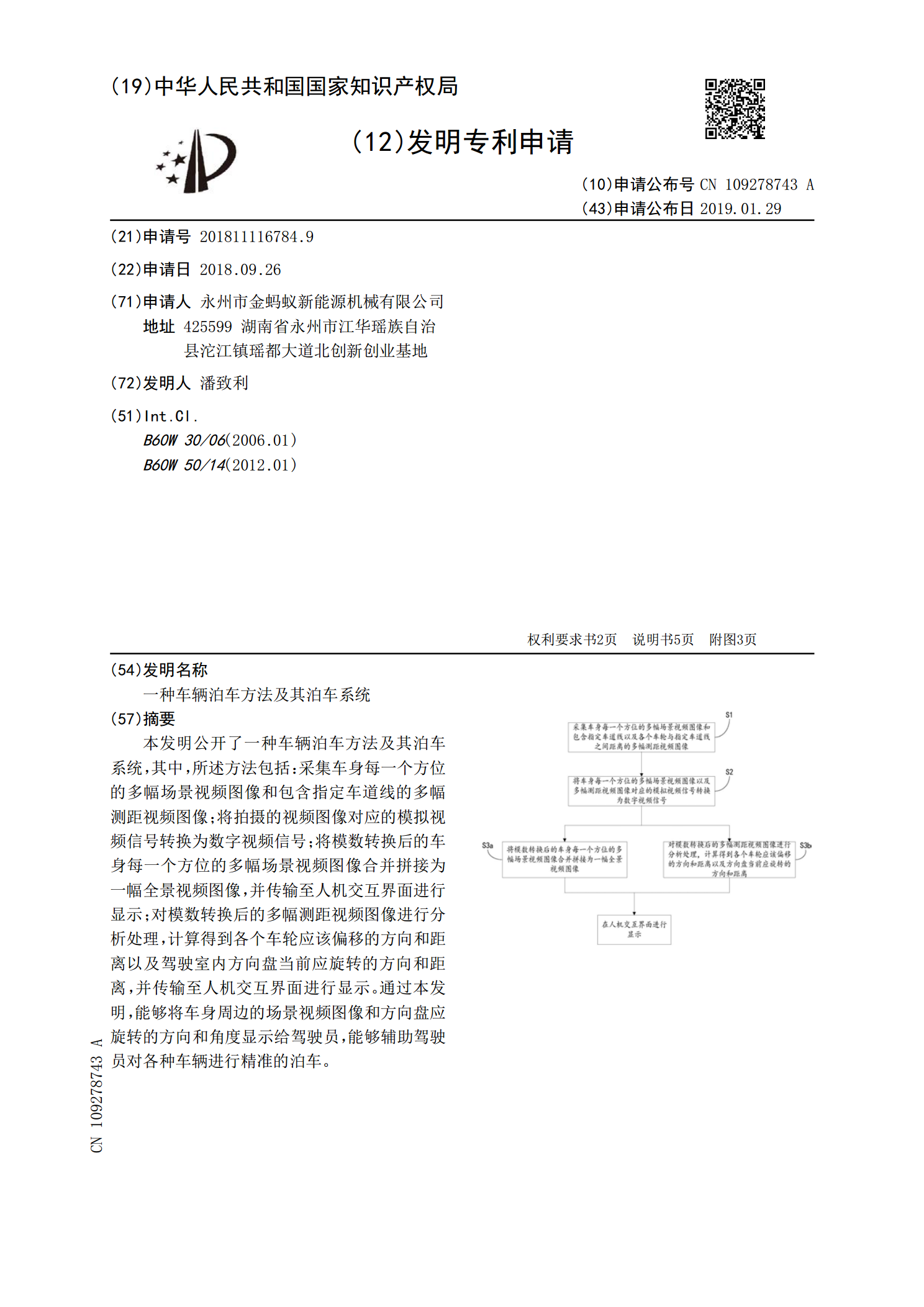
本发明公开了一种车辆泊车方法及其泊车系统,其中,所述方法包括:采集车身每一个方位的多幅场景视频图像和包含指定车道线的多幅测距视频图像;将拍摄的视频图像对应的模拟视频信号转换为数字视频信号;将模数转换后的车身每一个方位的多幅场景视频图像合并拼接为一幅全景视频图像,并传输至人机交互界面进行显示;对模数转换后的多幅测距视频图像进行分析处理,计算得到各个车轮应该偏移的方向和距离以及驾驶室内方向盘当前应旋转的方向和距离,并传输至人机交互界面进行显示。通过本发明,能够将车身周边的场景视频图像和方向盘应旋转的方向和角度
一种车辆泊车辅助方法及其泊车辅助系统.pdf
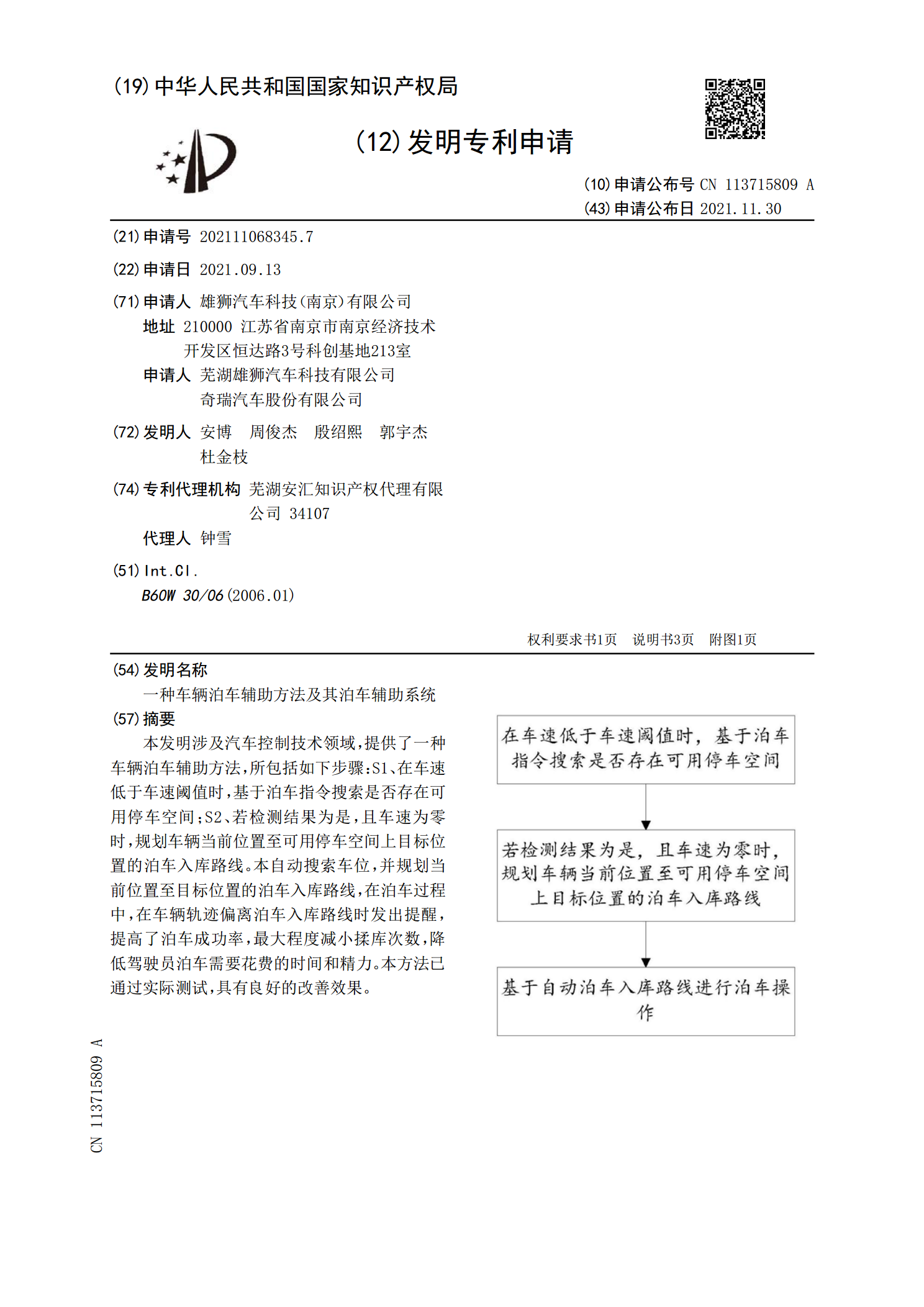
本发明涉及汽车控制技术领域,提供了一种车辆泊车辅助方法,所包括如下步骤:S1、在车速低于车速阈值时,基于泊车指令搜索是否存在可用停车空间;S2、若检测结果为是,且车速为零时,规划车辆当前位置至可用停车空间上目标位置的泊车入库路线。本自动搜索车位,并规划当前位置至目标位置的泊车入库路线,在泊车过程中,在车辆轨迹偏离泊车入库路线时发出提醒,提高了泊车成功率,最大程度减小揉库次数,降低驾驶员泊车需要花费的时间和精力。本方法已通过实际测试,具有良好的改善效果。
一种车辆及其全景泊车方法、系统.pdf
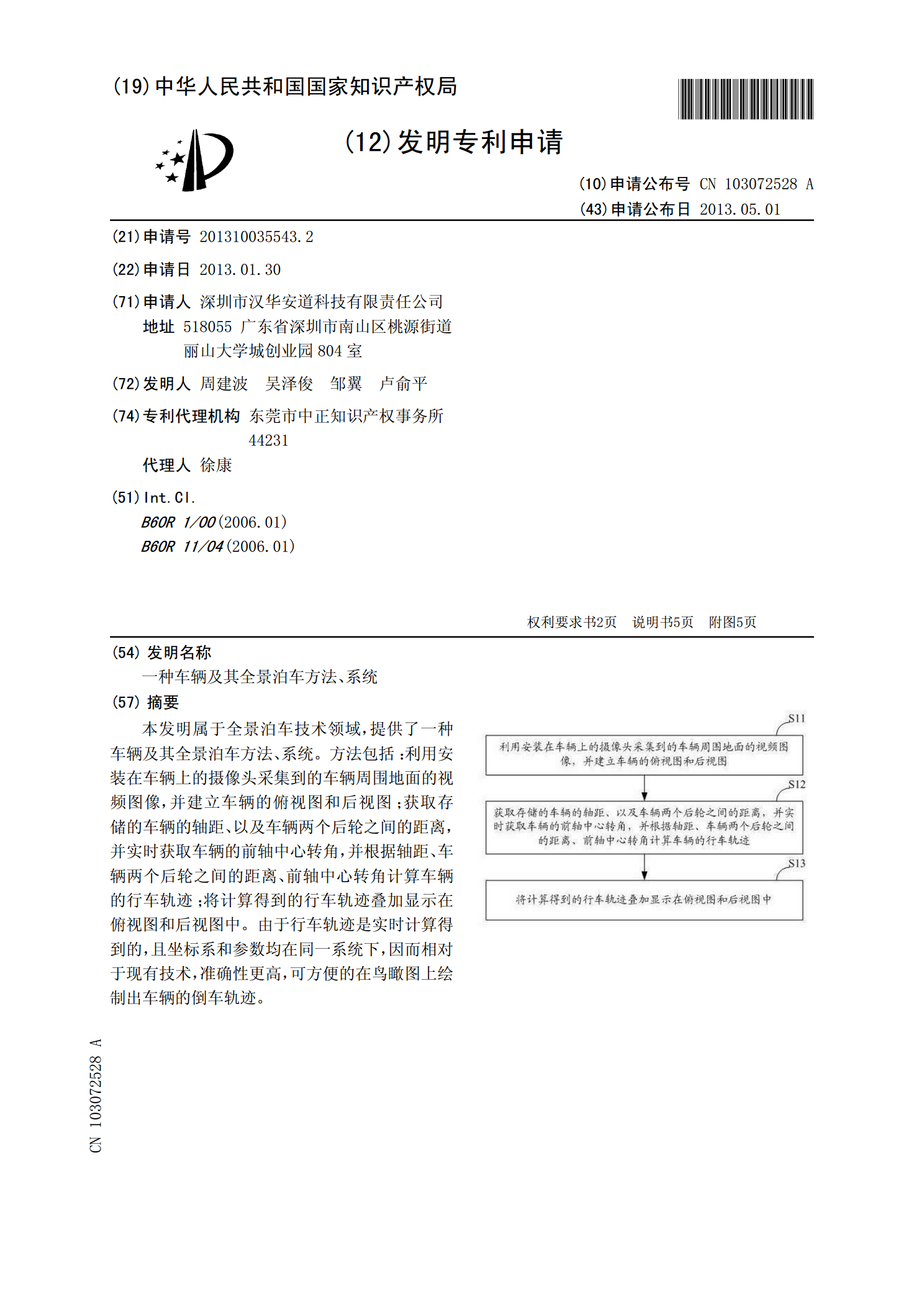
本发明属于全景泊车技术领域,提供了一种车辆及其全景泊车方法、系统。方法包括:利用安装在车辆上的摄像头采集到的车辆周围地面的视频图像,并建立车辆的俯视图和后视图;获取存储的车辆的轴距、以及车辆两个后轮之间的距离,并实时获取车辆的前轴中心转角,并根据轴距、车辆两个后轮之间的距离、前轴中心转角计算车辆的行车轨迹;将计算得到的行车轨迹叠加显示在俯视图和后视图中。由于行车轨迹是实时计算得到的,且坐标系和参数均在同一系统下,因而相对于现有技术,准确性更高,可方便的在鸟瞰图上绘制出车辆的倒车轨迹。

一种泊车系统及其垂直方向泊车方法.pdf
本发明公开了一种泊车系统及其垂直方向泊车方法。该系统由测距传感器、车速传感器、中央处理模块以及语音提示模块组成。在寻库过程中,通过测距传感器实时测量车两侧距离障碍物的距离,结合车速信息判断满足要求的空闲车位;采用“四步法”完成垂直泊车:S1,将方向盘回正将车辆调整到右后轮中心处于P1点处,提示停车换前进档;S2,方向盘左打满,向前行驶直至右后轮中心处于M点,提示停车换倒档;S3,方向盘右打满,倒车行驶直至右后轮中心处于O点,提示方向盘回正;S4,方向盘回正向后行驶直至距离后方障碍物30厘米或车辆前边缘与侧

泊车辅助系统及泊车方法.pdf
本发明公开了一种泊车辅助系统及泊车方法。其中,系统包括:通讯模块、图像采集模块和图像处理模块;通讯模块,用于接收车辆发送的短消息集,根据短消息集向图像采集模块发送启动信号;接收图像处理模块传输的处理后的图像,将处理后的图像发送至车辆,以供车辆根据处理后的图像进行泊车;图像采集模块,用于根据启动信号进行车辆驶入车库的图像采集,将图像传输至图像处理模块;图像处理模块,用于对图像进行校正和压缩处理,将处理后的图像传输至通讯模块。本发明实现了实时传输图像,使驾驶员根据传输的图像进行泊车,而且无需进行图像拼接,成本