
一种基于图像处理的灭火机器人及智能消防灭火方法.pdf

盼易****君a


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于图像处理的灭火机器人及智能消防灭火方法.pdf
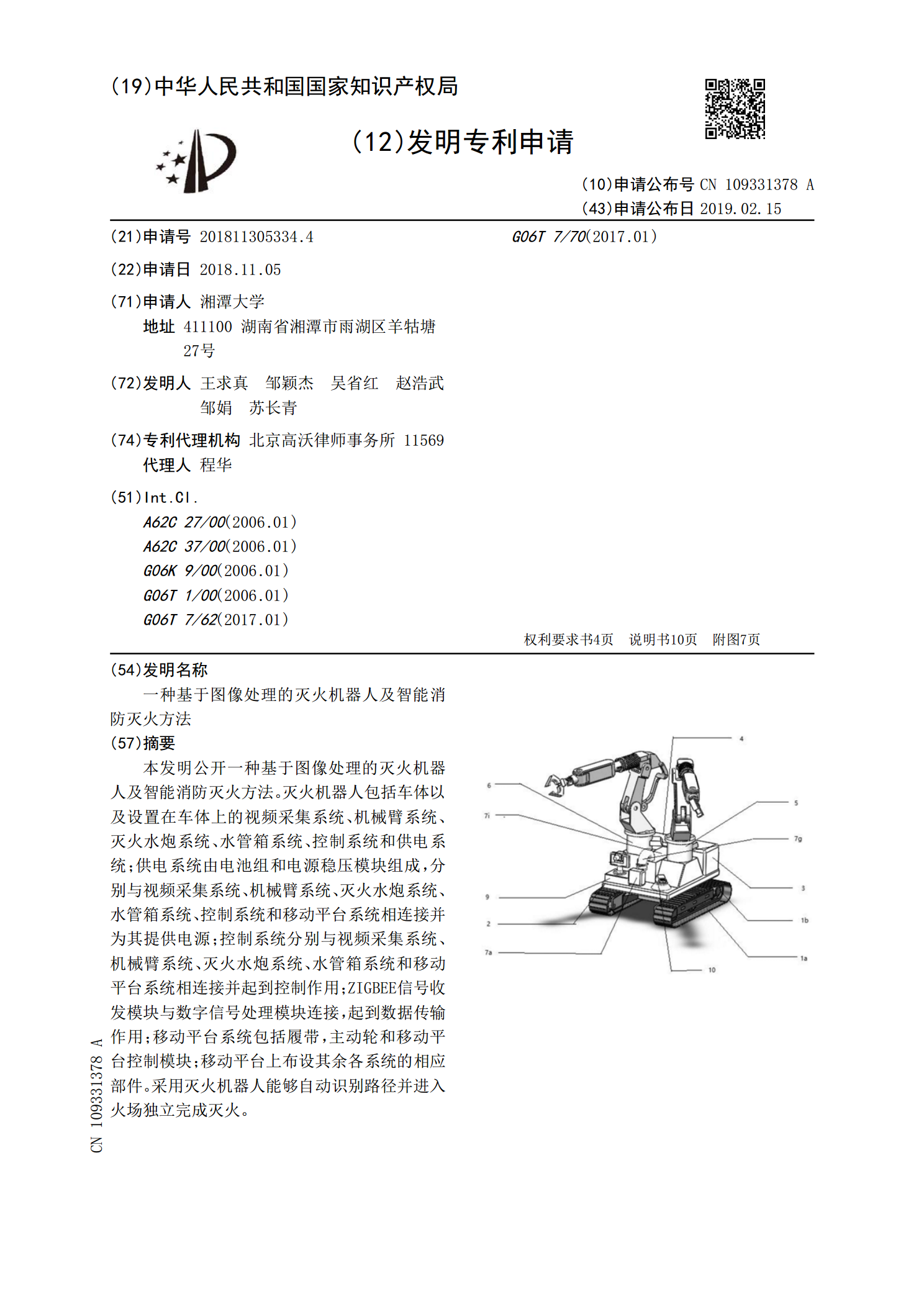
本发明公开一种基于图像处理的灭火机器人及智能消防灭火方法。灭火机器人包括车体以及设置在车体上的视频采集系统、机械臂系统、灭火水炮系统、水管箱系统、控制系统和供电系统;供电系统由电池组和电源稳压模块组成,分别与视频采集系统、机械臂系统、灭火水炮系统、水管箱系统、控制系统和移动平台系统相连接并为其提供电源;控制系统分别与视频采集系统、机械臂系统、灭火水炮系统、水管箱系统和移动平台系统相连接并起到控制作用;ZIGBEE信号收发模块与数字信号处理模块连接,起到数据传输作用;移动平台系统包括履带,主动轮和移动平台控

基于智能机器人消防装置的灭火控制系统及方法.pdf
本发明公开了一种基于智能机器人消防装置的灭火控制系统及方法,包括设置在机器人底盘(1)上的主控模块(2)和消防材料存储发射模块;机器人底盘(1)的前后两端分别设有双轴云台(3)和双光云台(4),双轴云台(3)上设有喷嘴(5),且喷嘴(5)与消防材料存储发射模块相连,所述双光云台(4)上设有可见光相机(6)和红外相机(7)。通过红外相机传感器发现温度异常和突发火情时,控制双轴云台调整喷头角度瞄准火源,同时控制消防材料存储发射模块和喷嘴喷射消防液,实施消防灭火处理。本发明具有能够有效提高灭火精度的特点。
一种消防智能机器人用灭火装置.pdf
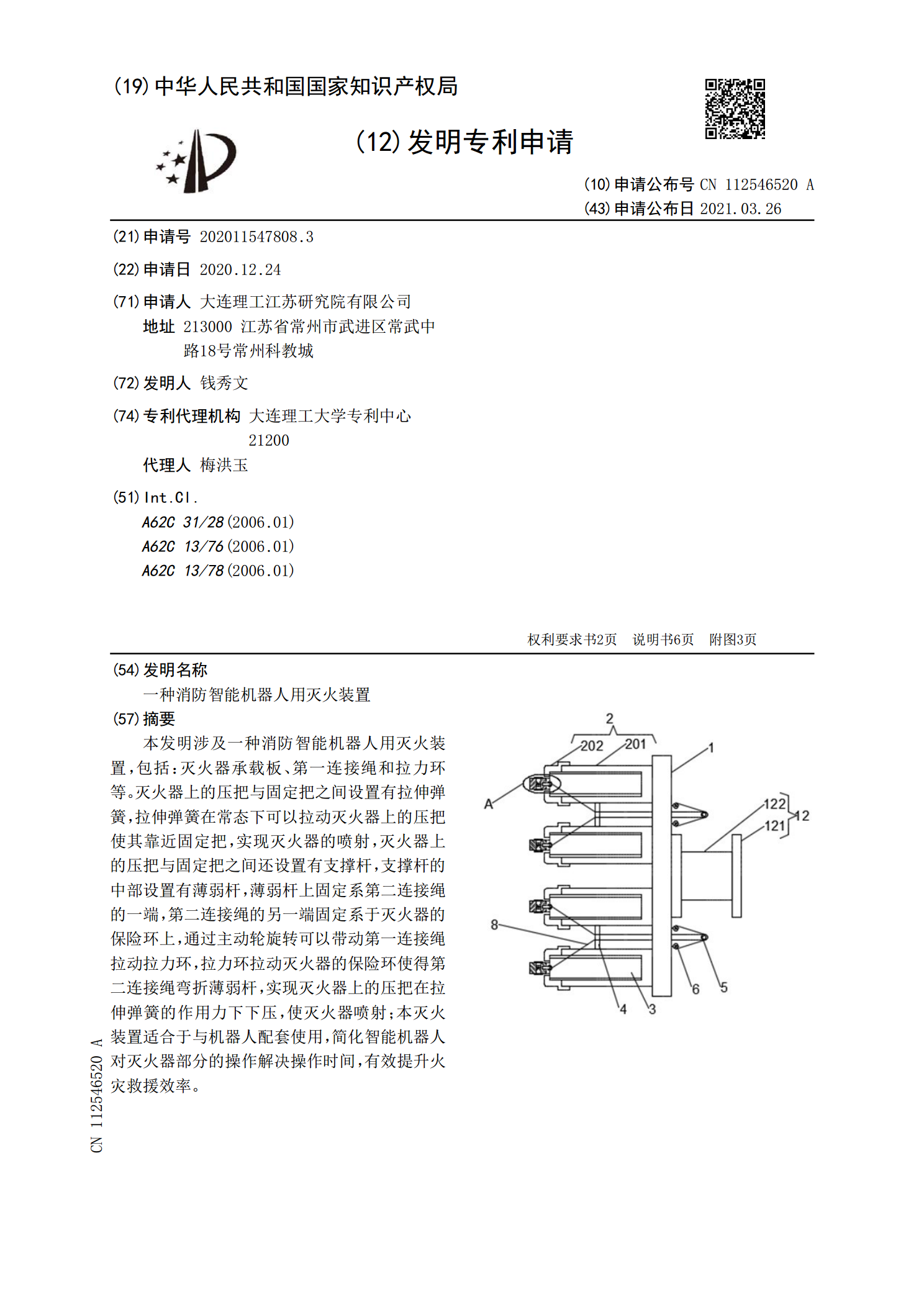
本发明涉及一种消防智能机器人用灭火装置,包括:灭火器承载板、第一连接绳和拉力环等。灭火器上的压把与固定把之间设置有拉伸弹簧,拉伸弹簧在常态下可以拉动灭火器上的压把使其靠近固定把,实现灭火器的喷射,灭火器上的压把与固定把之间还设置有支撑杆,支撑杆的中部设置有薄弱杆,薄弱杆上固定系第二连接绳的一端,第二连接绳的另一端固定系于灭火器的保险环上,通过主动轮旋转可以带动第一连接绳拉动拉力环,拉力环拉动灭火器的保险环使得第二连接绳弯折薄弱杆,实现灭火器上的压把在拉伸弹簧的作用力下下压,使灭火器喷射;本灭火装置适合于与
一种智能消防灭火机器人.pdf
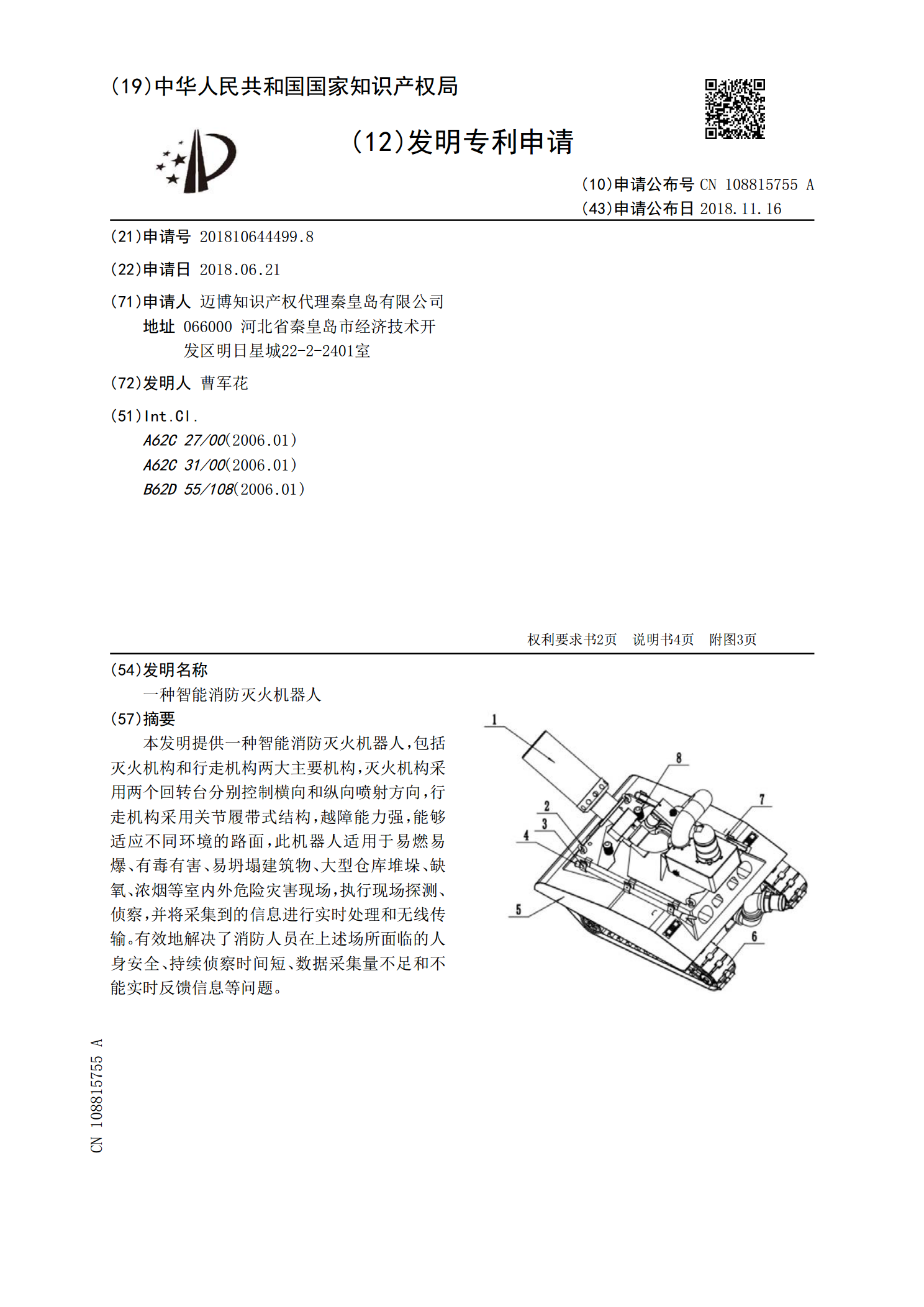
本发明提供一种智能消防灭火机器人,包括灭火机构和行走机构两大主要机构,灭火机构采用两个回转台分别控制横向和纵向喷射方向,行走机构采用关节履带式结构,越障能力强,能够适应不同环境的路面,此机器人适用于易燃易爆、有毒有害、易坍塌建筑物、大型仓库堆垛、缺氧、浓烟等室内外危险灾害现场,执行现场探测、侦察,并将采集到的信息进行实时处理和无线传输。有效地解决了消防人员在上述场所面临的人身安全、持续侦察时间短、数据采集量不足和不能实时反馈信息等问题。

机器人智能灭火.doc
机器人智能灭火一、教学目标:1、知识与技能目标:了解亮度检测传感器的使用方法,了解机器人灭火的工作原理。2、过程与方法目标:⑴学会亮度检测传感器及机器人灭火原理。⑵学会分析和处理机器人出现各种情况。3、情感目标:培养学生动手、动脑能力,培养学生创新意识和精神。二、教学重难点:1、教学重点:亮度检测传感器的使用和灭火原理。2、教学难点:⑴灭火基本原理。⑵出现各种情况成因分析。三、课时:1四、教学过程:(一)激趣导入:师演示机器人灭火的视频,生观看。(二)新课教学:1、师出示灭火流程图并分析。2、请学生自学本