
一种多功能机器人.pdf

书生****22

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多功能机器人.pdf
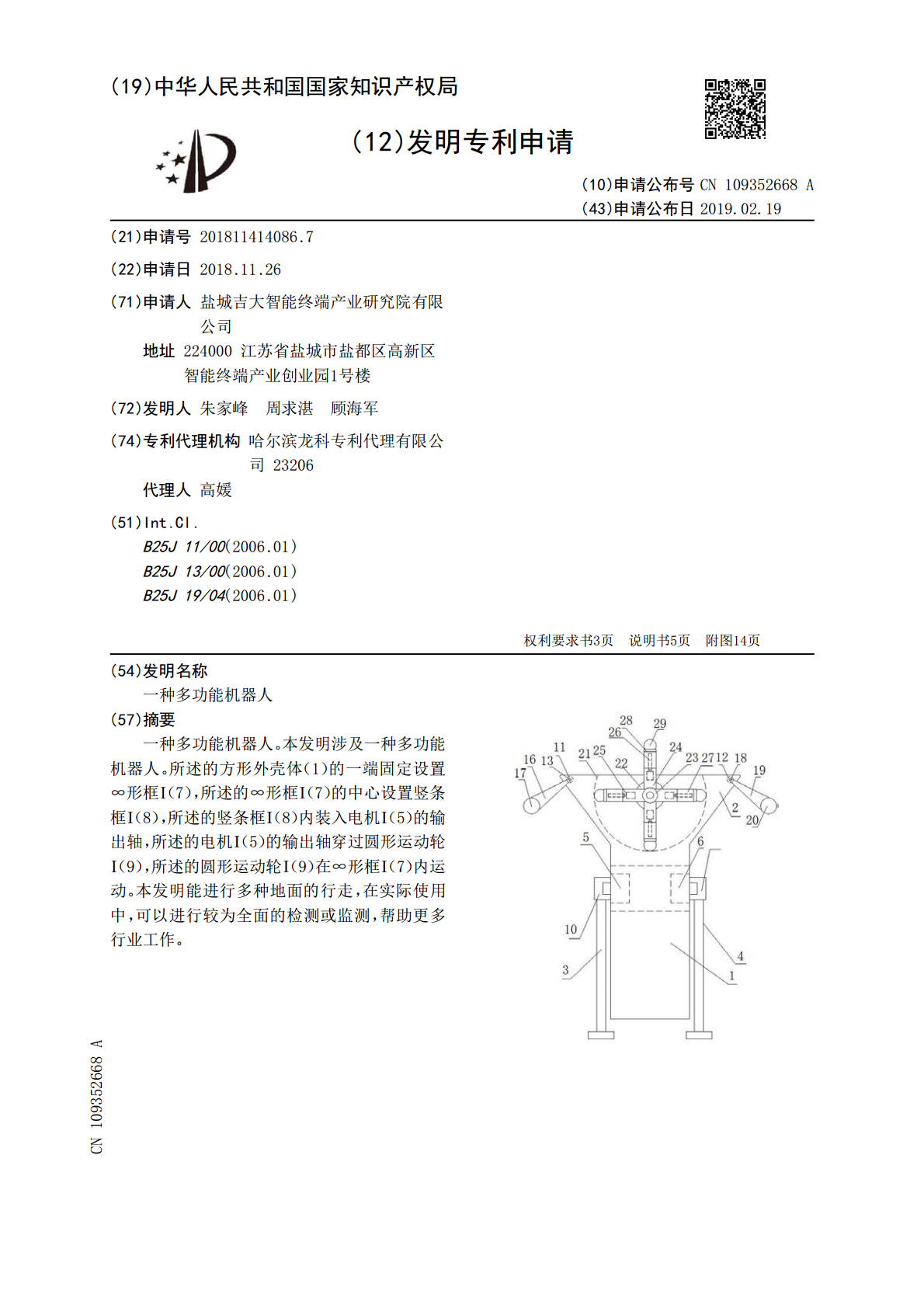
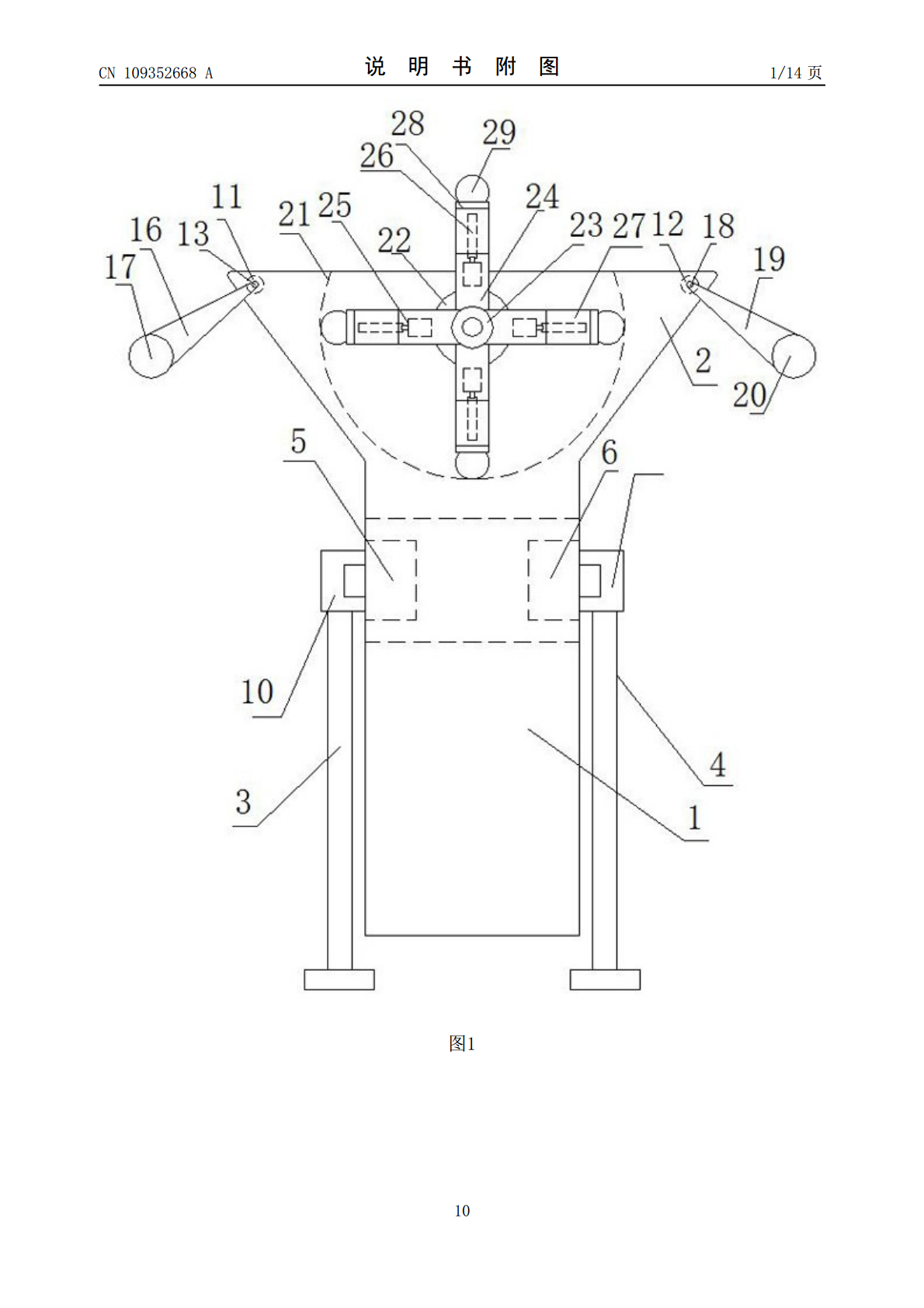
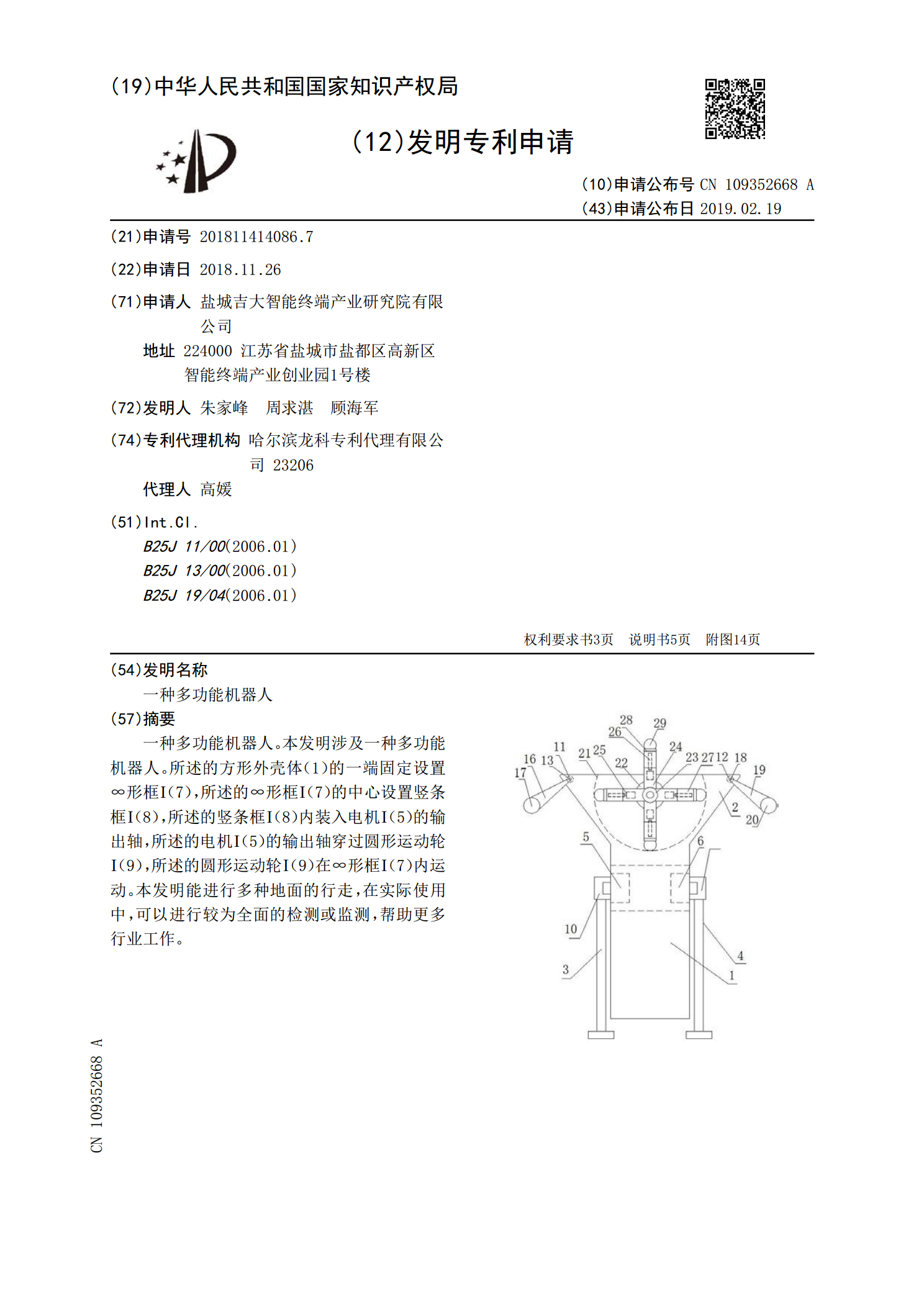
一种多功能机器人。本发明涉及一种多功能机器人。所述的方形外壳体(1)的一端固定设置∞形框Ⅰ(7),所述的∞形框Ⅰ(7)的中心设置竖条框Ⅰ(8),所述的竖条框Ⅰ(8)内装入电机Ⅰ(5)的输出轴,所述的电机Ⅰ(5)的输出轴穿过圆形运动轮Ⅰ(9),所述的圆形运动轮Ⅰ(9)在∞形框Ⅰ(7)内运动。本发明能进行多种地面的行走,在实际使用中,可以进行较为全面的检测或监测,帮助更多行业工作。

一种多功能机器人.pdf
本发明公开了一种多功能机器人,包括本体,所述本体顶部的中端固定连接有控制箱,所述控制箱内腔底部的中端固定连接有控制中心,所述控制箱顶部的中端固定安装有摄像头,所述本体左侧的顶部固定连接有转轴。本发明通过控制箱顶部的中端固定安装有摄像头,起到了拍照的效果,通过吸尘口、吸尘器和垃圾桶的配合,起到了可吸除灰尘的效果,通过音乐播放器,起到了可播放音乐的效果,通过无线信号发射器,起到了发射信号的效果,并通过图像集中器,起到了集中图像的效果,解决了现有的机器人虽然供能十分全面,但实际时使用功能都比较单一,且适用范围受

一种多功能蛇形机器人.pdf
本发明涉及一种多功能蛇形机器人。该机器人由多个基本节通过接头连接而成。基本节由基本节主体和驱动轮组成,在基本节主体的两侧和下面都装有驱动轮,驱动轮由装在基本节主体内的步进电机驱动;接头由垂直轴支架、垂直轴、横向轴支架、横向轴和纵向轴组成,三轴中任意两轴相互垂直,纵向轴包括纵向轴内轴和纵向轴外套两部分,垂直轴支架和横向轴支架分别安装在前后基本节上进行连接,垂直轴、横向轴和纵向轴通过离合装置与步进电机连接,实现基本节之间的不同位姿关系,当某轴的离合装置断开时,该轴处于自由状态,可自由转动,当某轴的离合装置连接
一种多功能修剪机器人.pdf
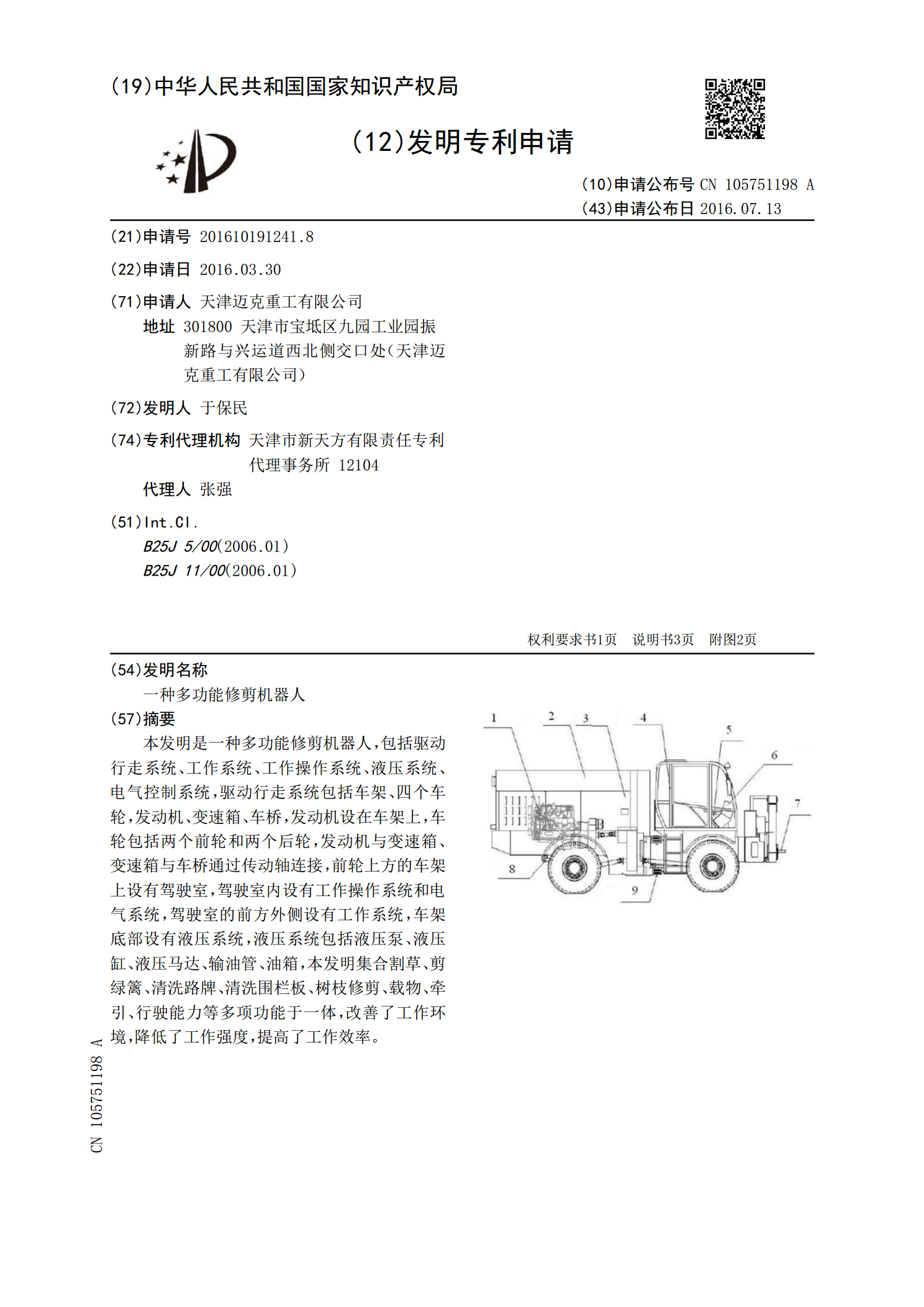
本发明是一种多功能修剪机器人,包括驱动行走系统、工作系统、工作操作系统、液压系统、电气控制系统,驱动行走系统包括车架、四个车轮,发动机、变速箱、车桥,发动机设在车架上,车轮包括两个前轮和两个后轮,发动机与变速箱、变速箱与车桥通过传动轴连接,前轮上方的车架上设有驾驶室,驾驶室内设有工作操作系统和电气系统,驾驶室的前方外侧设有工作系统,车架底部设有液压系统,液压系统包括液压泵、液压缸、液压马达、输油管、油箱,本发明集合割草、剪绿篱、清洗路牌、清洗围栏板、树枝修剪、载物、牵引、行驶能力等多项功能于一体,改善了工
一种多功能越障机器人.pdf
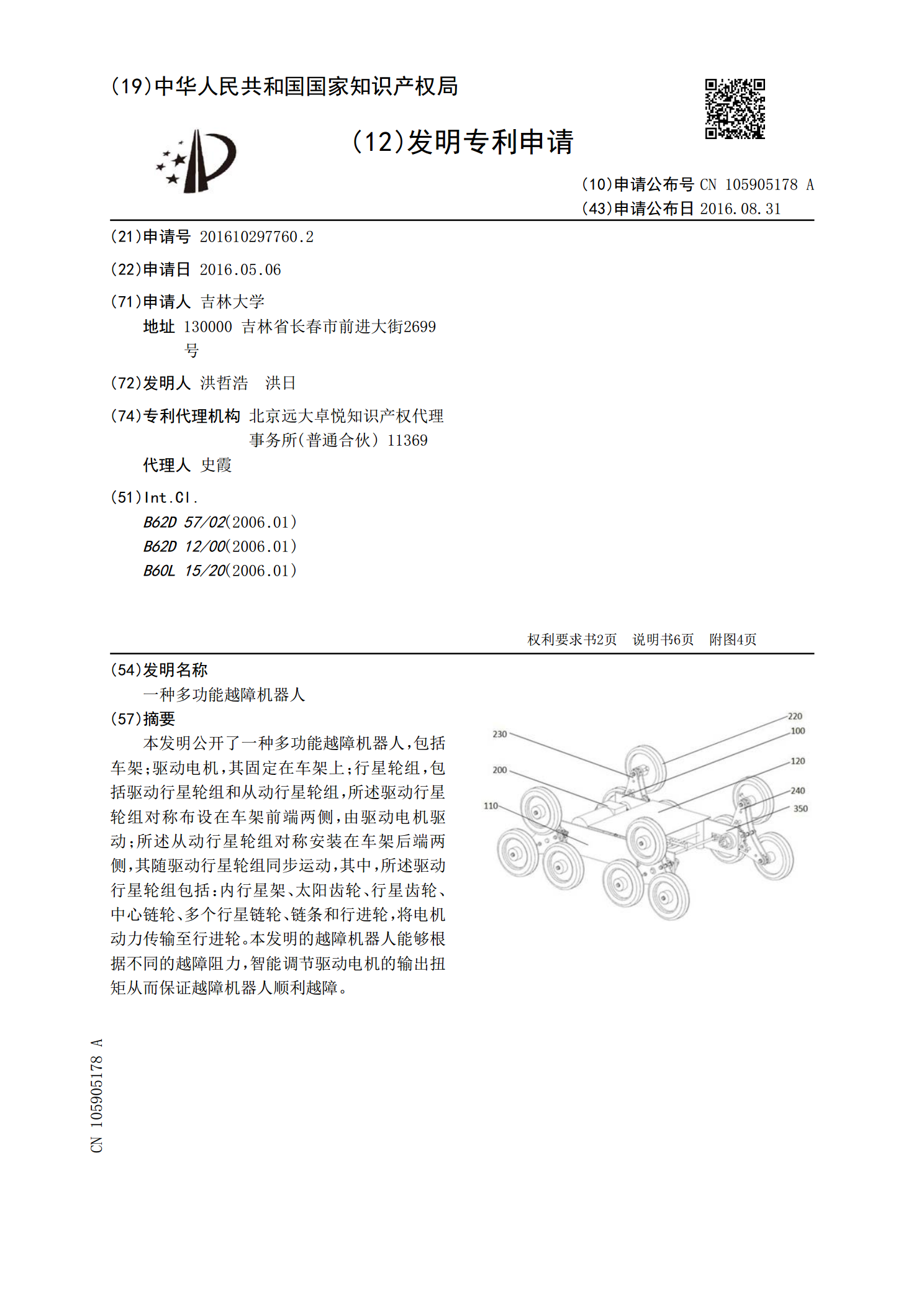
本发明公开了一种多功能越障机器人,包括车架;驱动电机,其固定在车架上;行星轮组,包括驱动行星轮组和从动行星轮组,所述驱动行星轮组对称布设在车架前端两侧,由驱动电机驱动;所述从动行星轮组对称安装在车架后端两侧,其随驱动行星轮组同步运动,其中,所述驱动行星轮组包括:内行星架、太阳齿轮、行星齿轮、中心链轮、多个行星链轮、链条和行进轮,将电机动力传输至行进轮。本发明的越障机器人能够根据不同的越障阻力,智能调节驱动电机的输出扭矩从而保证越障机器人顺利越障。