
一种多功能蛇形机器人.pdf

佳宁****么啦


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多功能蛇形机器人.pdf
本发明涉及一种多功能蛇形机器人。该机器人由多个基本节通过接头连接而成。基本节由基本节主体和驱动轮组成,在基本节主体的两侧和下面都装有驱动轮,驱动轮由装在基本节主体内的步进电机驱动;接头由垂直轴支架、垂直轴、横向轴支架、横向轴和纵向轴组成,三轴中任意两轴相互垂直,纵向轴包括纵向轴内轴和纵向轴外套两部分,垂直轴支架和横向轴支架分别安装在前后基本节上进行连接,垂直轴、横向轴和纵向轴通过离合装置与步进电机连接,实现基本节之间的不同位姿关系,当某轴的离合装置断开时,该轴处于自由状态,可自由转动,当某轴的离合装置连接
一种自适应多功能蛇形机器人.pdf
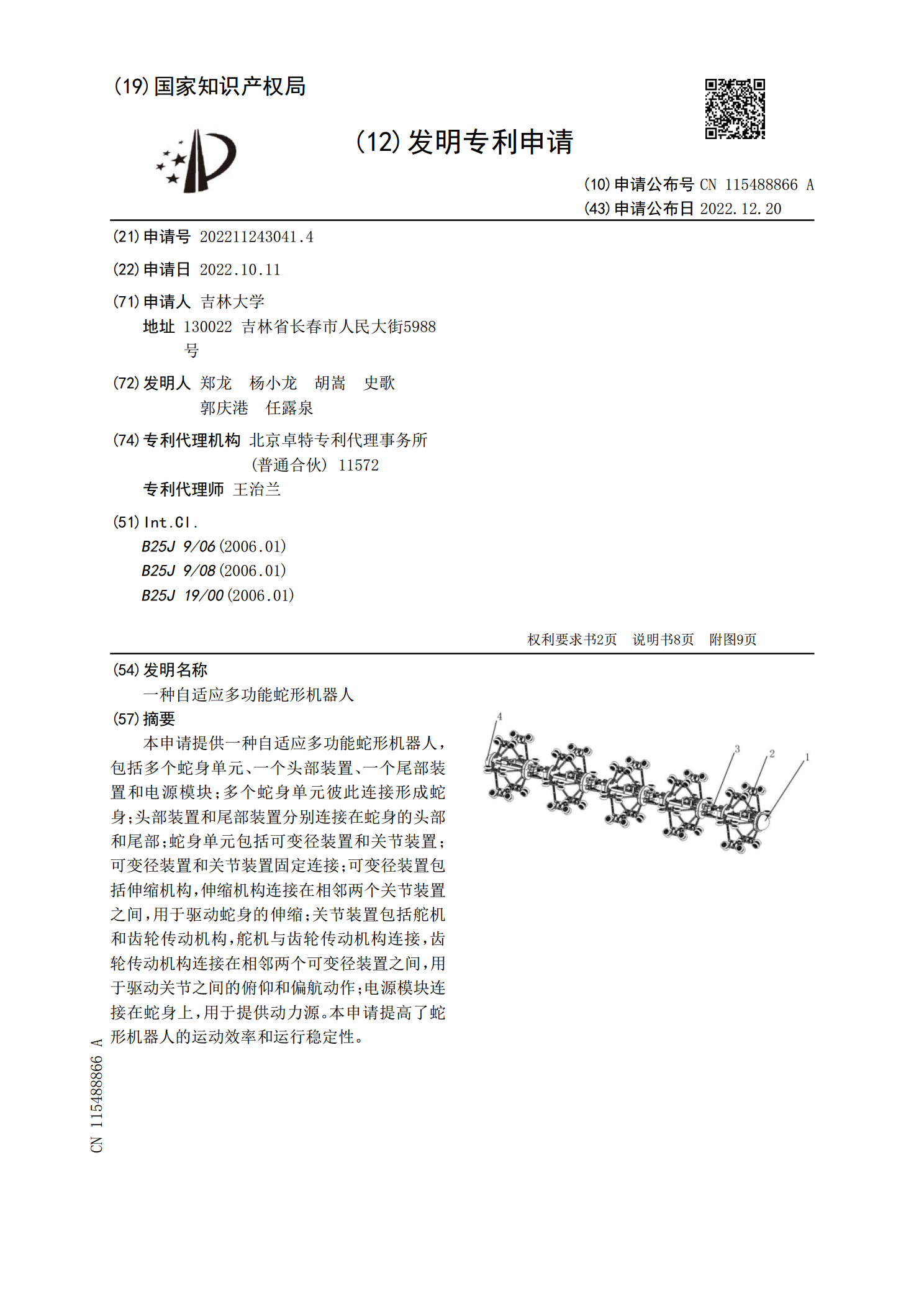
本申请提供一种自适应多功能蛇形机器人,包括多个蛇身单元、一个头部装置、一个尾部装置和电源模块;多个蛇身单元彼此连接形成蛇身;头部装置和尾部装置分别连接在蛇身的头部和尾部;蛇身单元包括可变径装置和关节装置;可变径装置和关节装置固定连接;可变径装置包括伸缩机构,伸缩机构连接在相邻两个关节装置之间,用于驱动蛇身的伸缩;关节装置包括舵机和齿轮传动机构,舵机与齿轮传动机构连接,齿轮传动机构连接在相邻两个可变径装置之间,用于驱动关节之间的俯仰和偏航动作;电源模块连接在蛇身上,用于提供动力源。本申请提高了蛇形机器人的运

一种蛇形机器人.pdf
本发明提供了一种蛇形机器人,包括机器人本体,所述机器人本体包括头部、第一躯干部、第二躯干部和尾部,所述头部和所述第一躯干部通过第一伸缩部相连接,本发明通过第一躯干部的第一舵机驱动第一运动部旋转,同时第一运动部的运动轮本身又发生自转,结合第一舵机的牵引力以及运动轮的转动力,推动头部向前移动,第一电动推杆配合头部的移动发生伸长和收缩,拉动第二躯干部,第二躯干部的第二舵机稍滞后于第一舵机工作,驱动第二运动部旋转,从而推动第一躯干部和头部向前移动,第二电动推杆配合第二躯干部的移动发生伸长和收缩,拉动尾部,从而实现

一种蛇形机器人.pdf
本发明公开了一种蛇形机器人,包括蛇体、舵机控制板和电源锂电池,蛇体包括若干组依次串接的蛇体关节,每个蛇体关节的前后连接板设计了防滑齿,蛇形机器人的CPU通过无线接收模块接收来自计算机端的控制指令,CPU将控制指令处理后通过I/O口驱动多路舵机,为蛇形机器人运动提供驱动动力。本发明所提供的蛇形机器人模仿蛇的行波运动,进行仿生设计,采用模块化设计,机构更加简单,安装更加简单,通过在蛇体关节上增加防滑齿机构,增加了与地面的摩擦力,提高了运动效率。
一种蛇形机器人.pdf
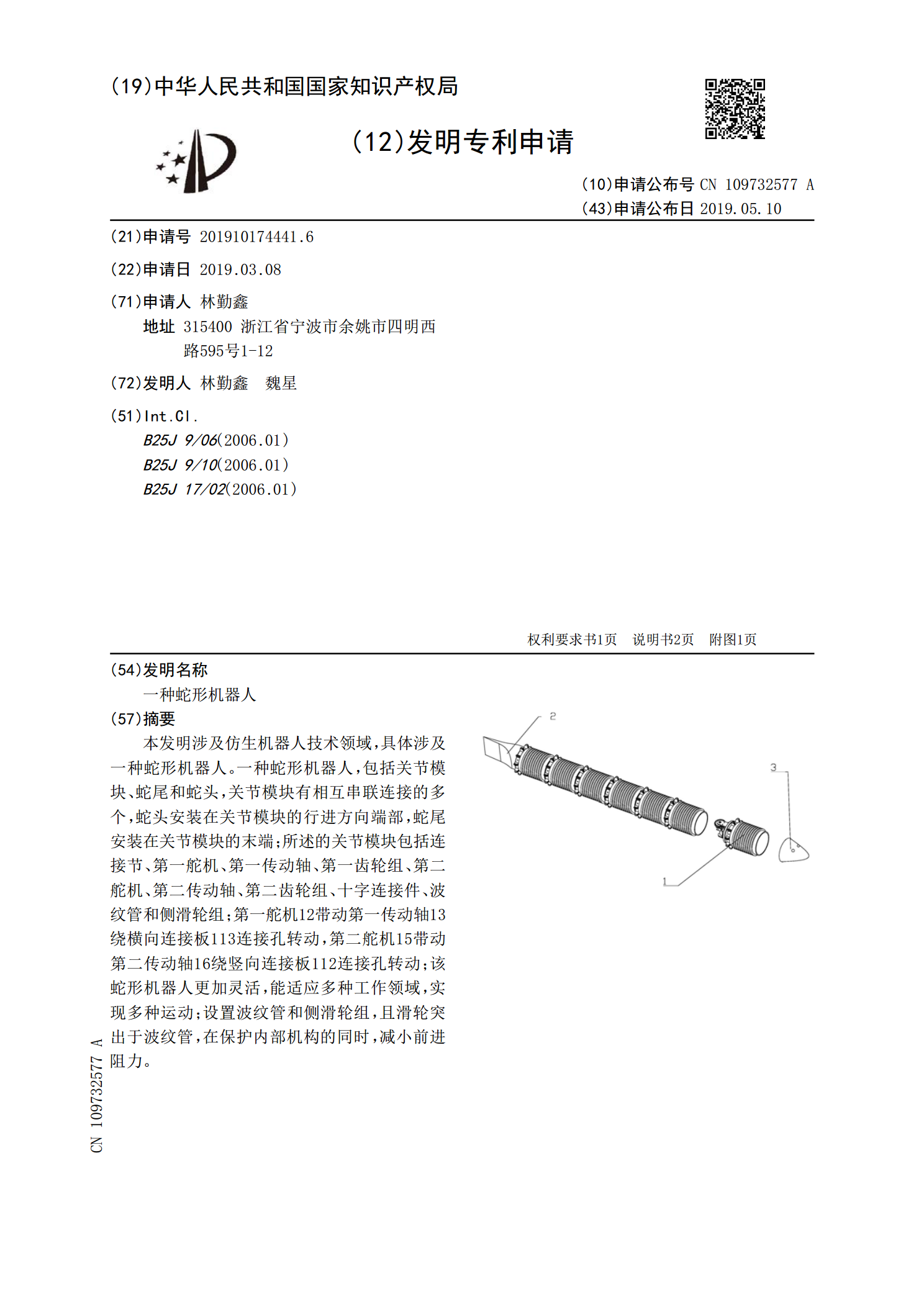
本发明涉及仿生机器人技术领域,具体涉及一种蛇形机器人。一种蛇形机器人,包括关节模块、蛇尾和蛇头,关节模块有相互串联连接的多个,蛇头安装在关节模块的行进方向端部,蛇尾安装在关节模块的末端;所述的关节模块包括连接节、第一舵机、第一传动轴、第一齿轮组、第二舵机、第二传动轴、第二齿轮组、十字连接件、波纹管和侧滑轮组;第一舵机12带动第一传动轴13绕横向连接板113连接孔转动,第二舵机15带动第二传动轴16绕竖向连接板112连接孔转动;该蛇形机器人更加灵活,能适应多种工作领域,实现多种运动;设置波纹管和侧滑轮组,且