
激光焊接机、焊接方法以及计算机可读存储介质.pdf

猫巷****忠娟


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光焊接机、焊接方法以及计算机可读存储介质.pdf
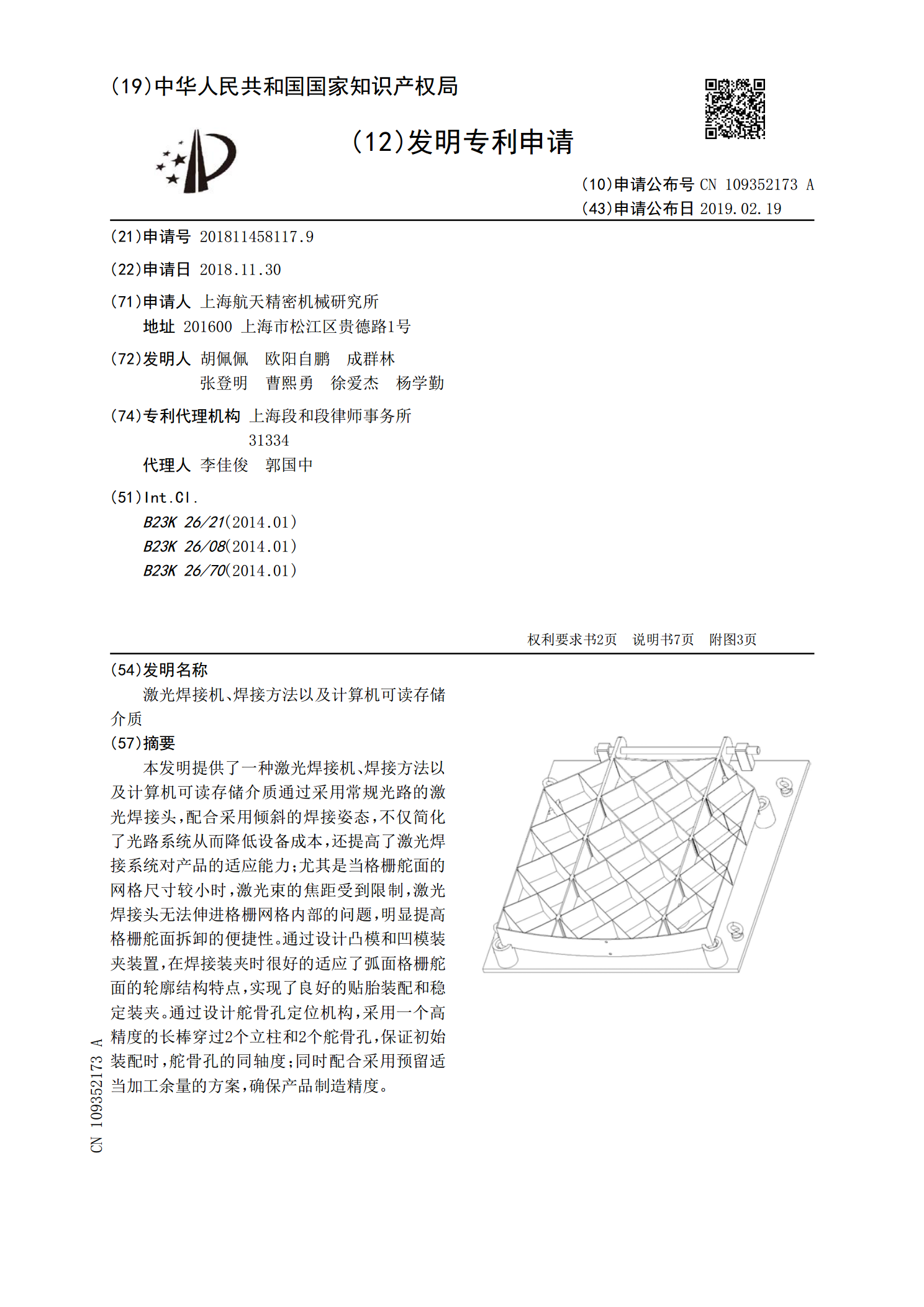
本发明提供了一种激光焊接机、焊接方法以及计算机可读存储介质通过采用常规光路的激光焊接头,配合采用倾斜的焊接姿态,不仅简化了光路系统从而降低设备成本,还提高了激光焊接系统对产品的适应能力;尤其是当格栅舵面的网格尺寸较小时,激光束的焦距受到限制,激光焊接头无法伸进格栅网格内部的问题,明显提高格栅舵面拆卸的便捷性。通过设计凸模和凹模装夹装置,在焊接装夹时很好的适应了弧面格栅舵面的轮廓结构特点,实现了良好的贴胎装配和稳定装夹。通过设计舵骨孔定位机构,采用一个高精度的长棒穿过2个立柱和2个舵骨孔,保证初始装配时,舵
激光焊接方法、装置及计算机可读存储介质.pdf
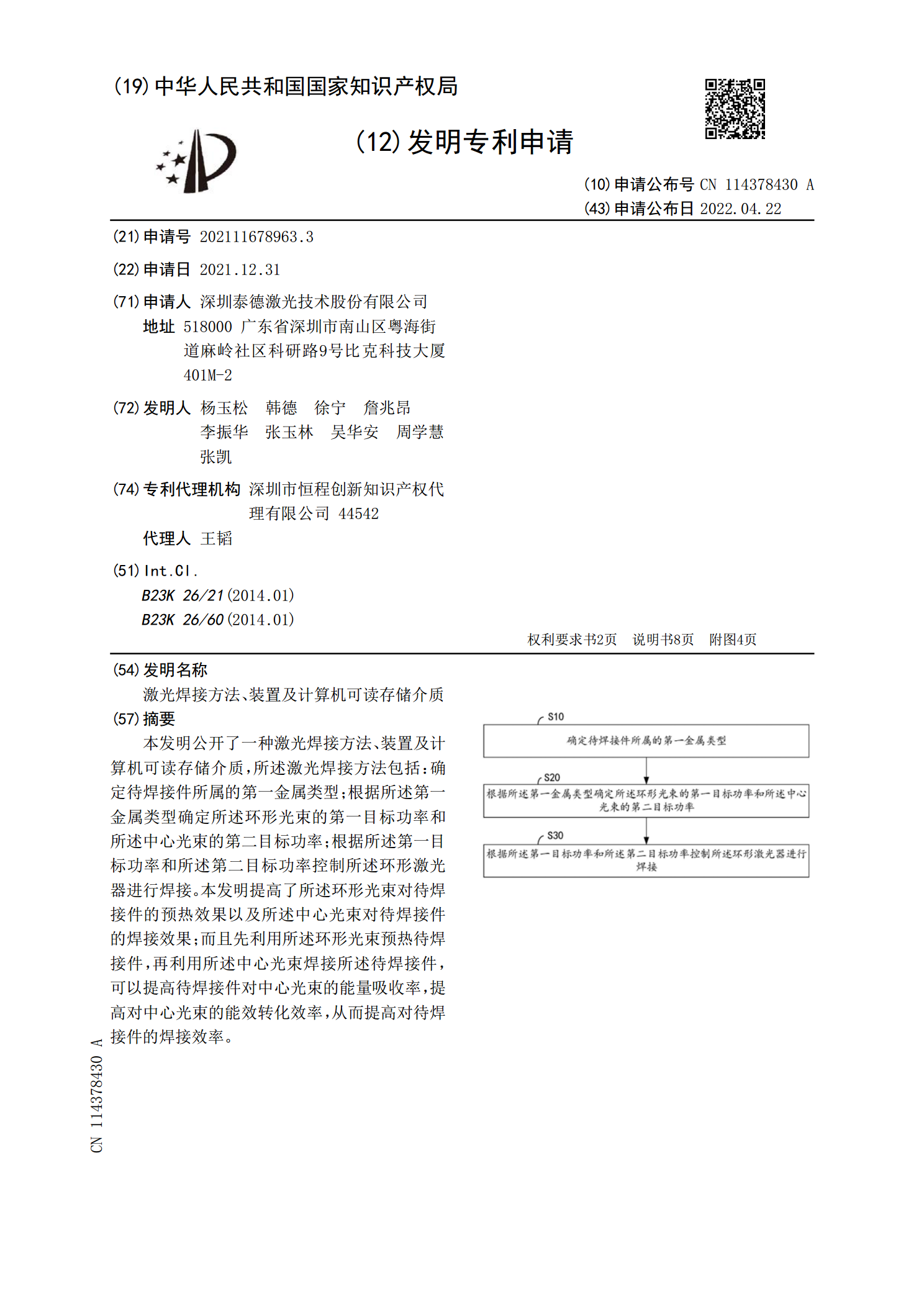
本发明公开了一种激光焊接方法、装置及计算机可读存储介质,所述激光焊接方法包括:确定待焊接件所属的第一金属类型;根据所述第一金属类型确定所述环形光束的第一目标功率和所述中心光束的第二目标功率;根据所述第一目标功率和所述第二目标功率控制所述环形激光器进行焊接。本发明提高了所述环形光束对待焊接件的预热效果以及所述中心光束对待焊接件的焊接效果;而且先利用所述环形光束预热待焊接件,再利用所述中心光束焊接所述待焊接件,可以提高待焊接件对中心光束的能量吸收率,提高对中心光束的能效转化效率,从而提高对待焊接件的焊接效率。

激光焊接调试方法、装置、设备及可读存储介质.pdf
本申请公开了一种激光焊接调试方法、装置、设备及可读存储介质,该方法包括步骤:获取激光喷锡焊接过程的图像信息;基于所述图像信息,生成所述激光喷锡焊接过程所对应波动曲线;所述波动曲线为由激光加热至熔融状态的锡料在焊接过程中的波动情况;若预设映射表中不存在与所述波动曲线对应的调试参数,则调整所述波动曲线至预设标准曲线,以完成激光焊接的调试。本申请实现了对激光喷锡焊接过程的图像信息进行采集,并将该图像信息转化为波动曲线,以表现喷锡过程中的锡料的波动情况,同时在预设映射表中不存在与波动曲线对应的调试参数时,以调整波
焊接方法、系统、装置及计算机可读存储介质.pdf
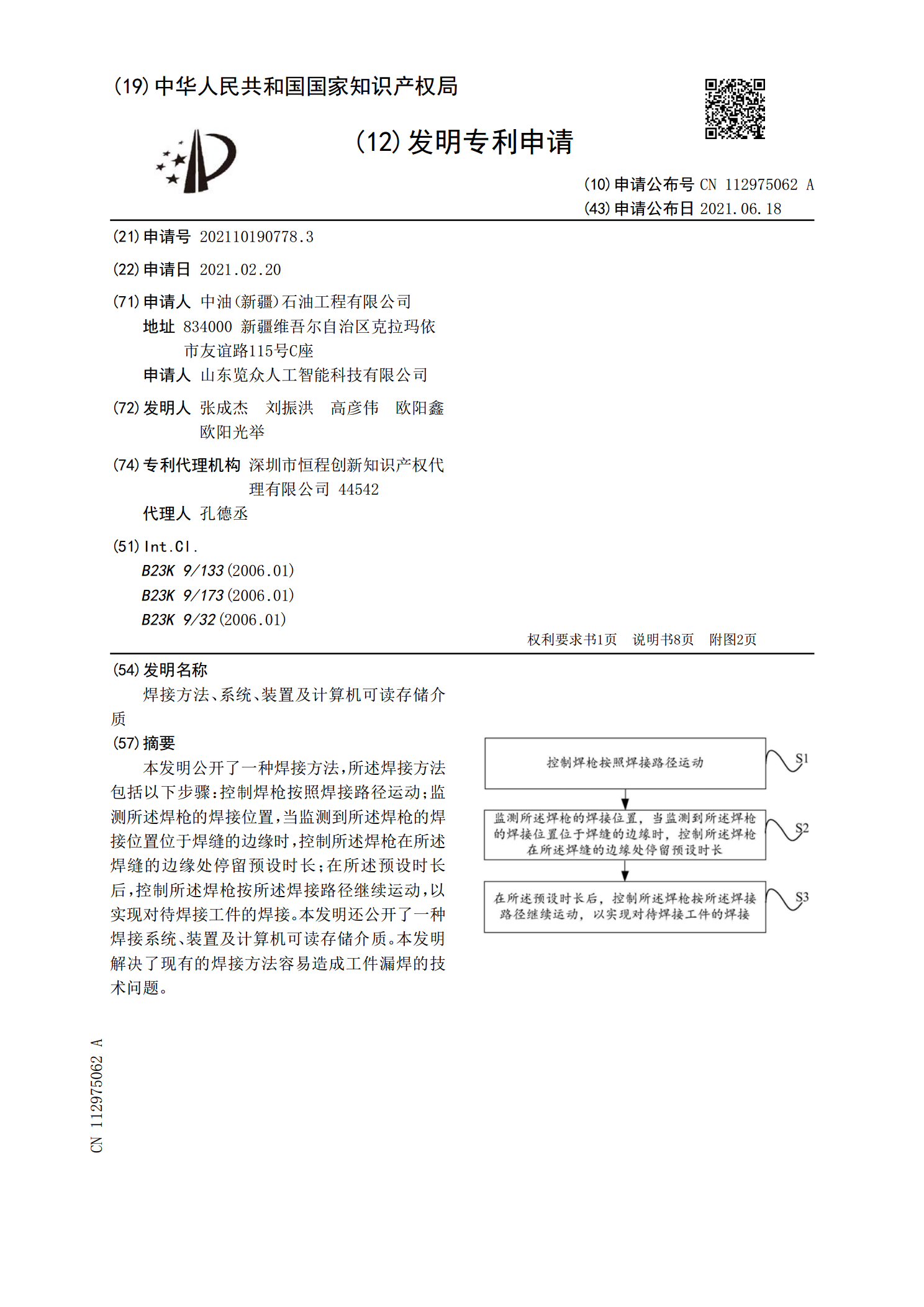
本发明公开了一种焊接方法,所述焊接方法包括以下步骤:控制焊枪按照焊接路径运动;监测所述焊枪的焊接位置,当监测到所述焊枪的焊接位置位于焊缝的边缘时,控制所述焊枪在所述焊缝的边缘处停留预设时长;在所述预设时长后,控制所述焊枪按所述焊接路径继续运动,以实现对待焊接工件的焊接。本发明还公开了一种焊接系统、装置及计算机可读存储介质。本发明解决了现有的焊接方法容易造成工件漏焊的技术问题。

激光打标的填充方法、装置、设备以及可读存储介质.pdf
本发明公开了一种激光打标的填充方法、激光打标装置、设备和计算机存储介质,激光打标的填充方法包括:获取等待激光标记的目标图像,识别并获取目标图像中标记轮廓;从标记轮廓中筛选出所围成区域需填充的目标标记轮廓,获取目标标记轮廓所围成的待填充区域的填充描述信息,所述填充描述信息包括待填充区域中各单元区域的填充属性;在填充属性为打标的单元区域中预设位置激光打标预设方向的填充线,以得到激光标记图像。本发明直接以预设位置和预设方向打标填充线,激光打标设备无需等待交点结果,大幅度提高了激光打标效率。