
全方向移动装置以及其姿势控制方法.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
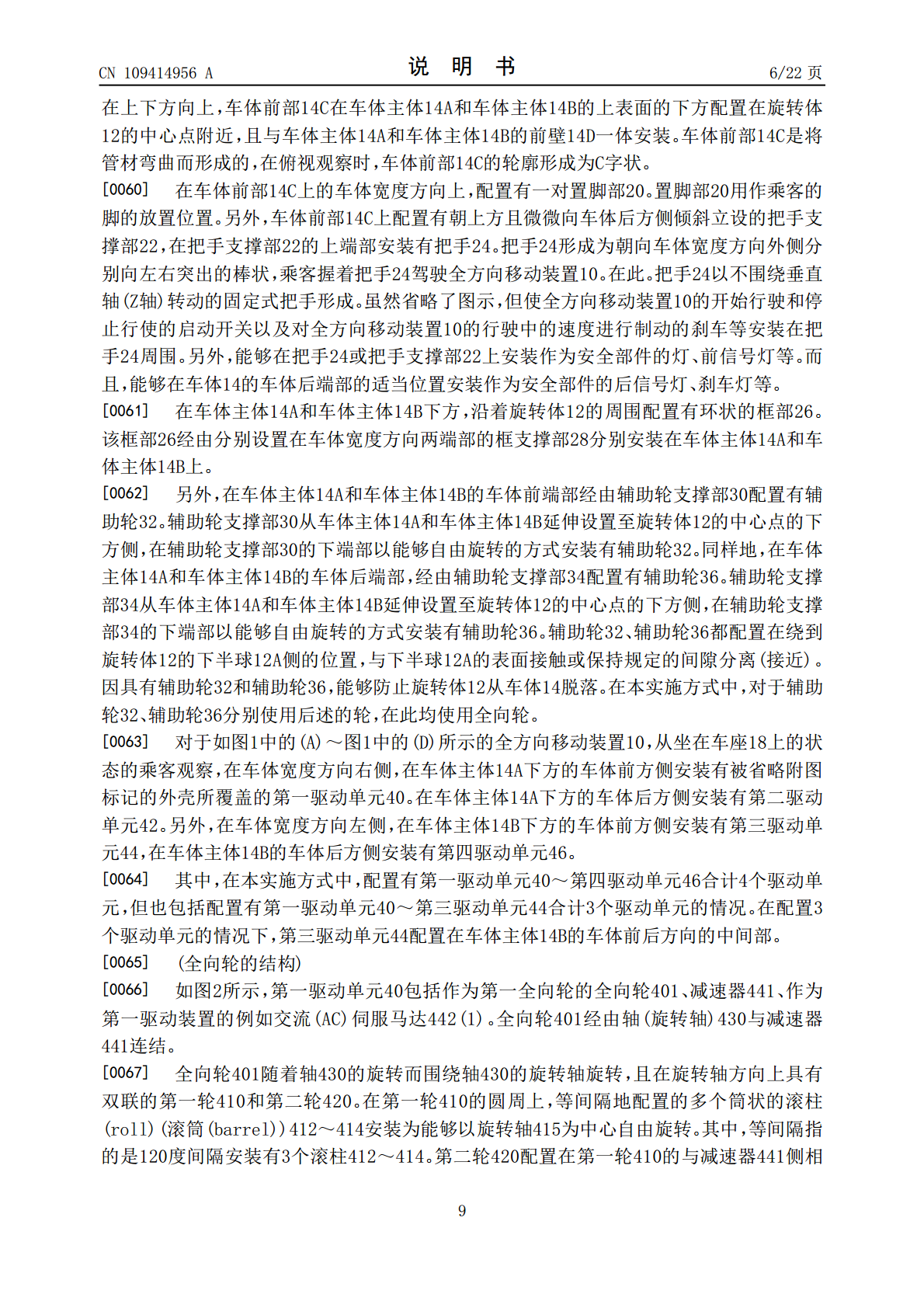
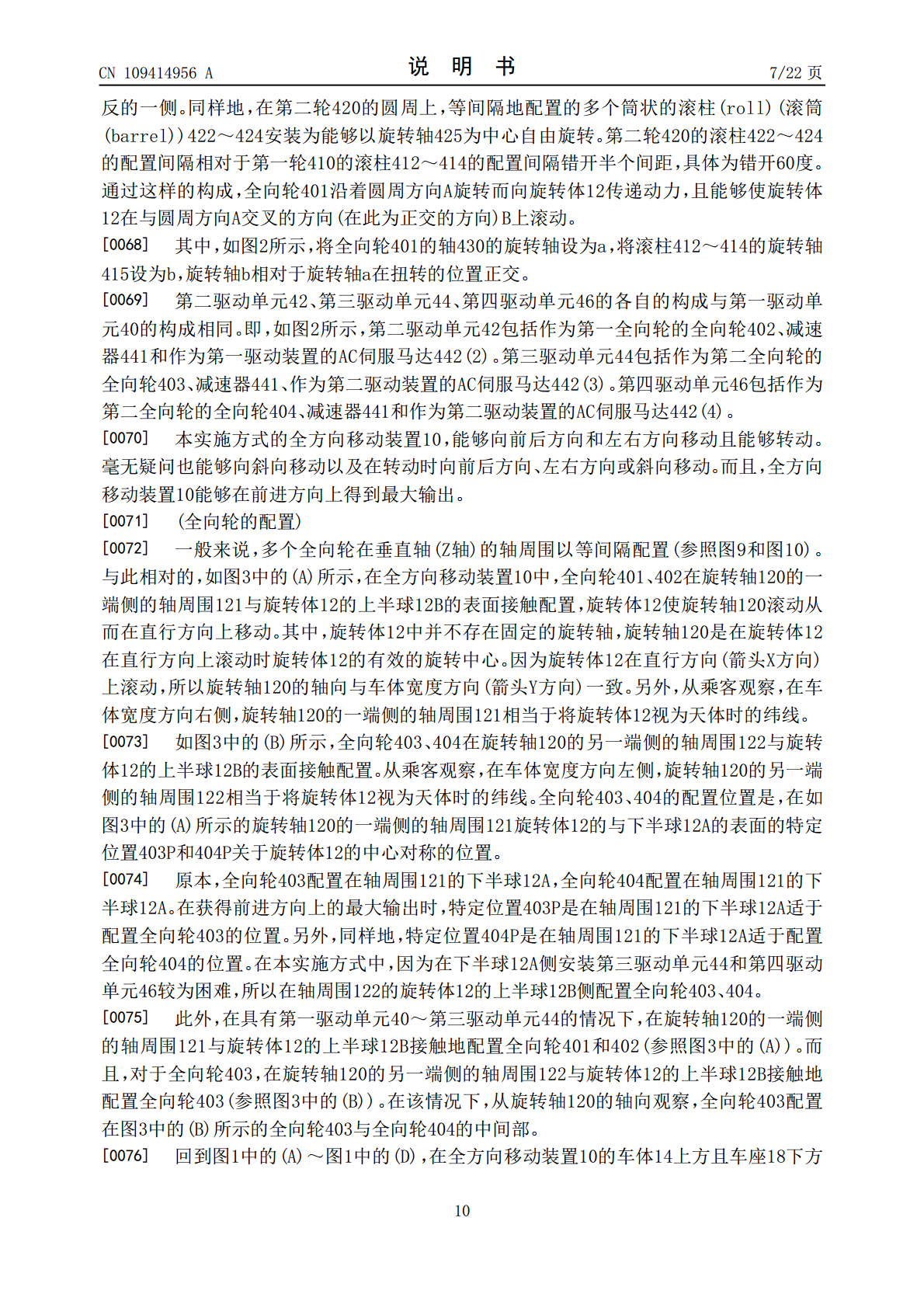
6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全方向移动装置以及其姿势控制方法.pdf
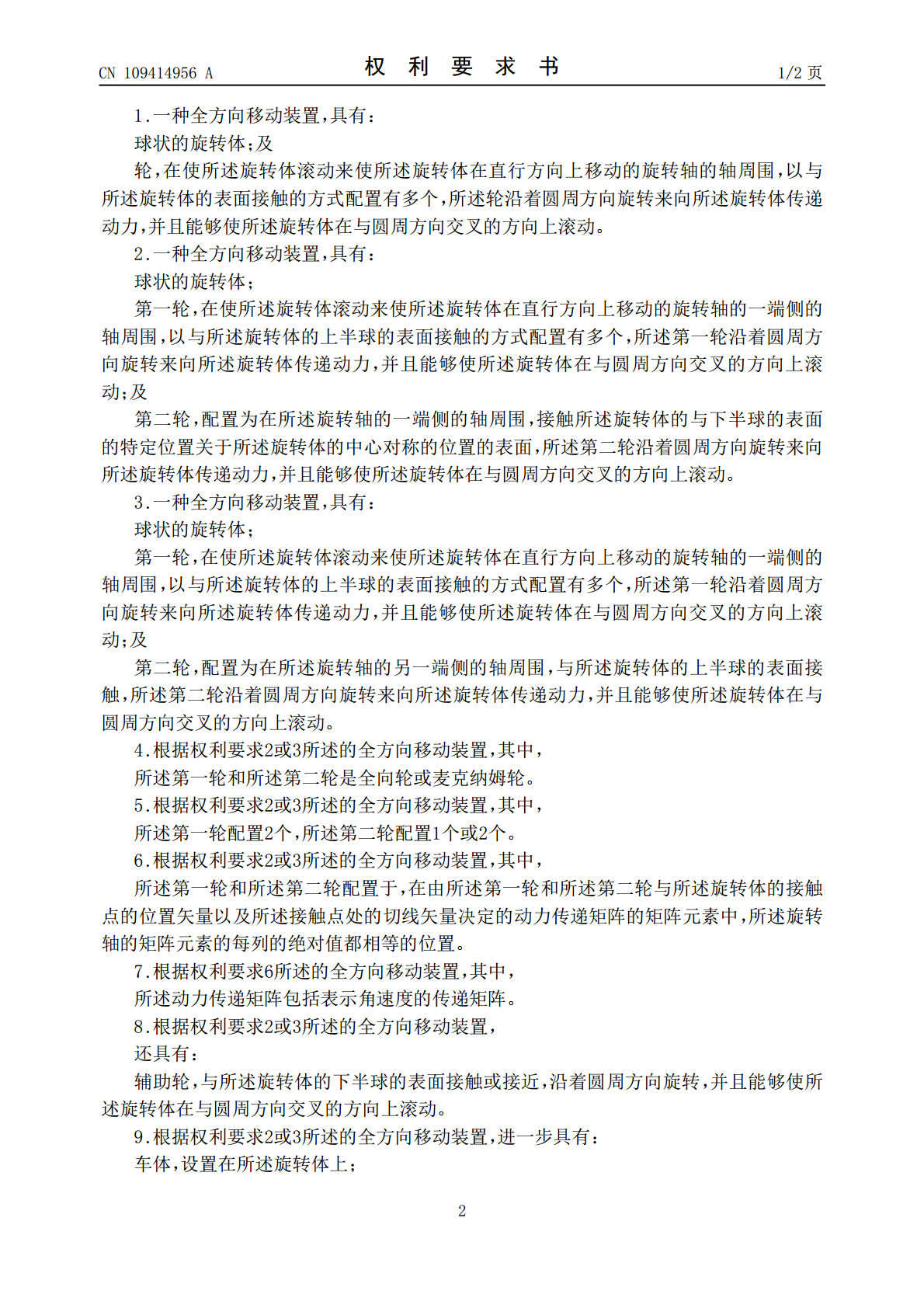
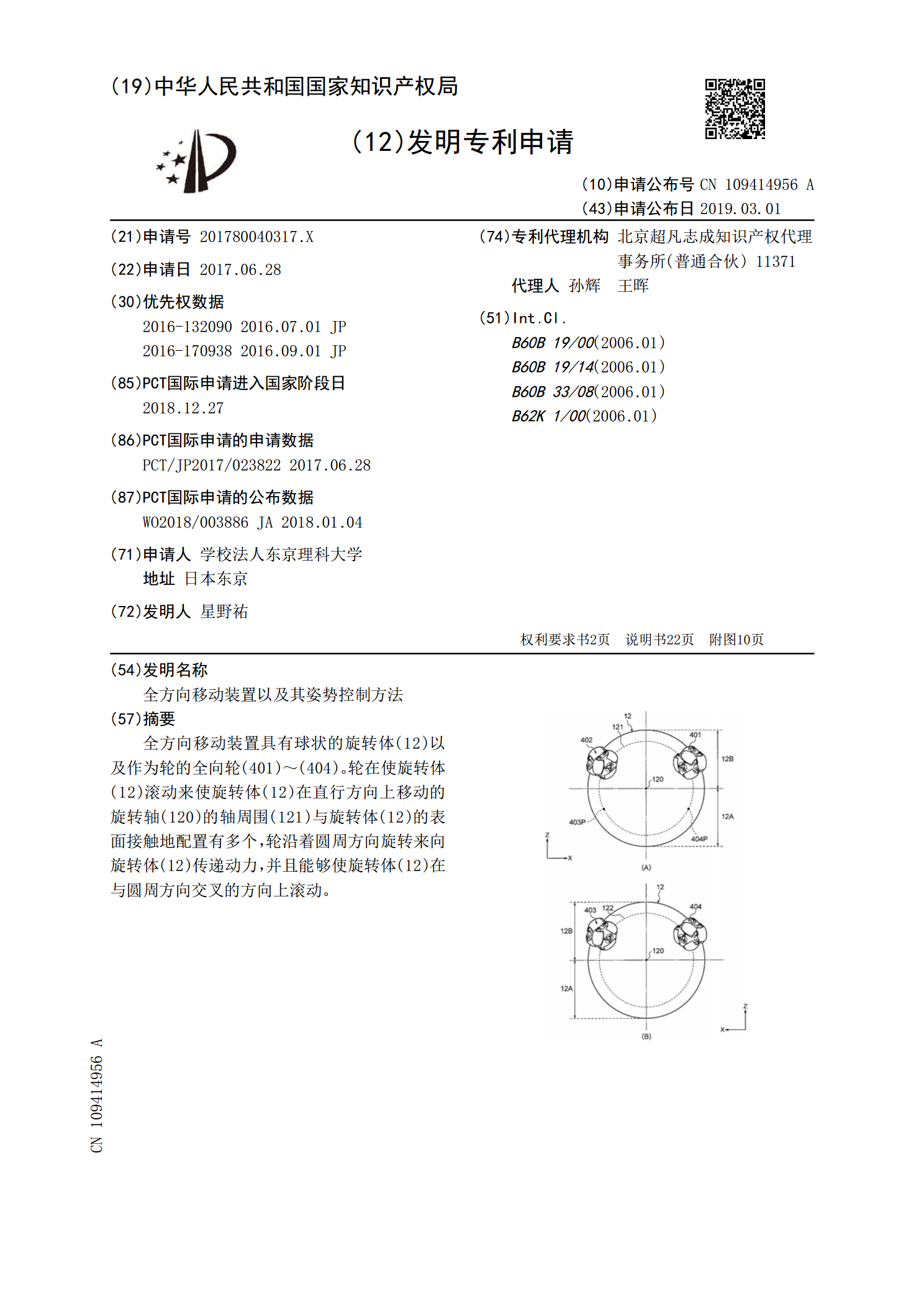
全方向移动装置具有球状的旋转体(12)以及作为轮的全向轮(401)~(404)。轮在使旋转体(12)滚动来使旋转体(12)在直行方向上移动的旋转轴(120)的轴周围(121)与旋转体(12)的表面接触地配置有多个,轮沿着圆周方向旋转来向旋转体(12)传递动力,并且能够使旋转体(12)在与圆周方向交叉的方向上滚动。
全方向推车及其控制方法.pdf
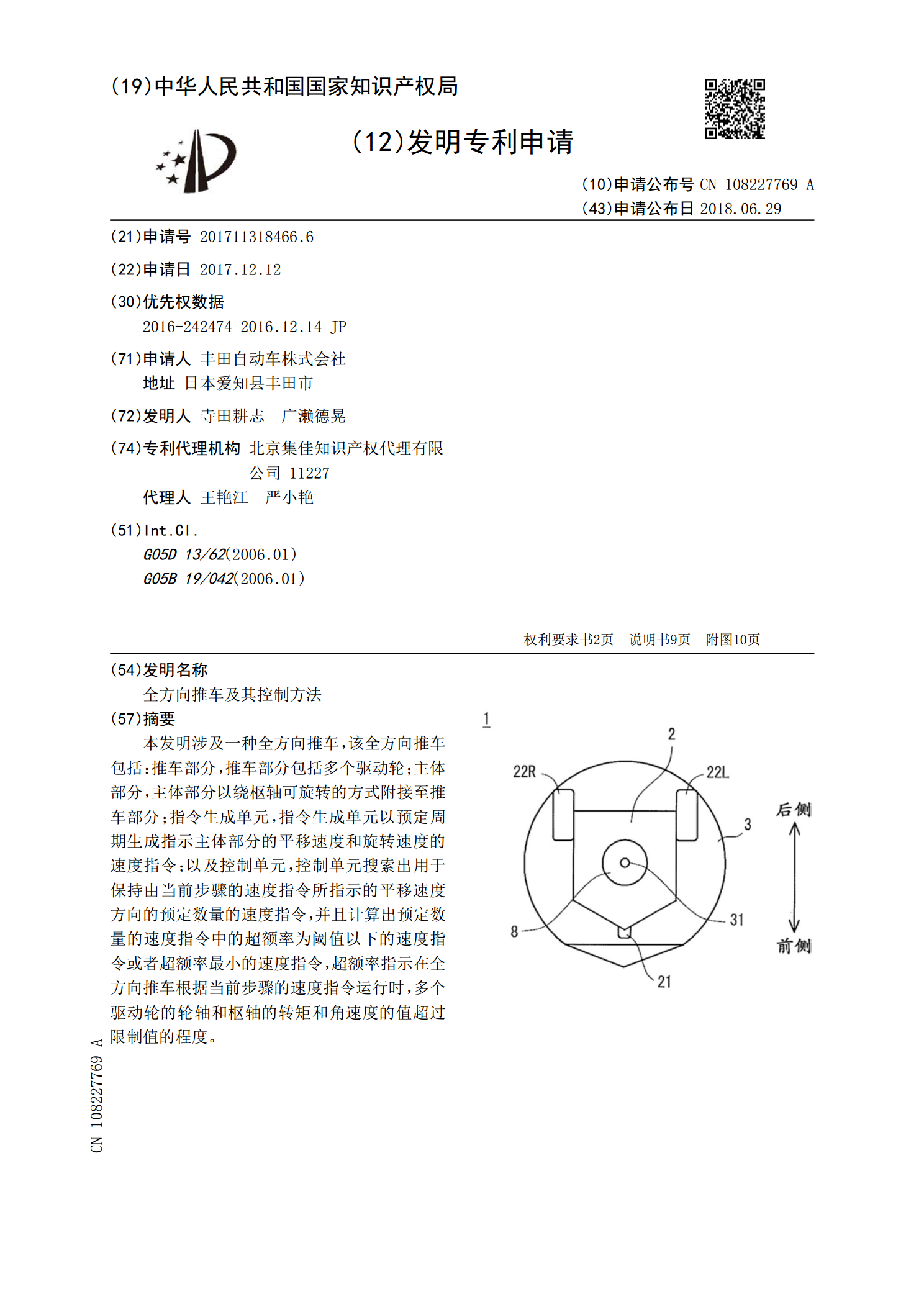
本发明涉及一种全方向推车,该全方向推车包括:推车部分,推车部分包括多个驱动轮;主体部分,主体部分以绕枢轴可旋转的方式附接至推车部分;指令生成单元,指令生成单元以预定周期生成指示主体部分的平移速度和旋转速度的速度指令;以及控制单元,控制单元搜索出用于保持由当前步骤的速度指令所指示的平移速度方向的预定数量的速度指令,并且计算出预定数量的速度指令中的超额率为阈值以下的速度指令或者超额率最小的速度指令,超额率指示在全方向推车根据当前步骤的速度指令运行时,多个驱动轮的轮轴和枢轴的转矩和角速度的值超过限制值的程度。
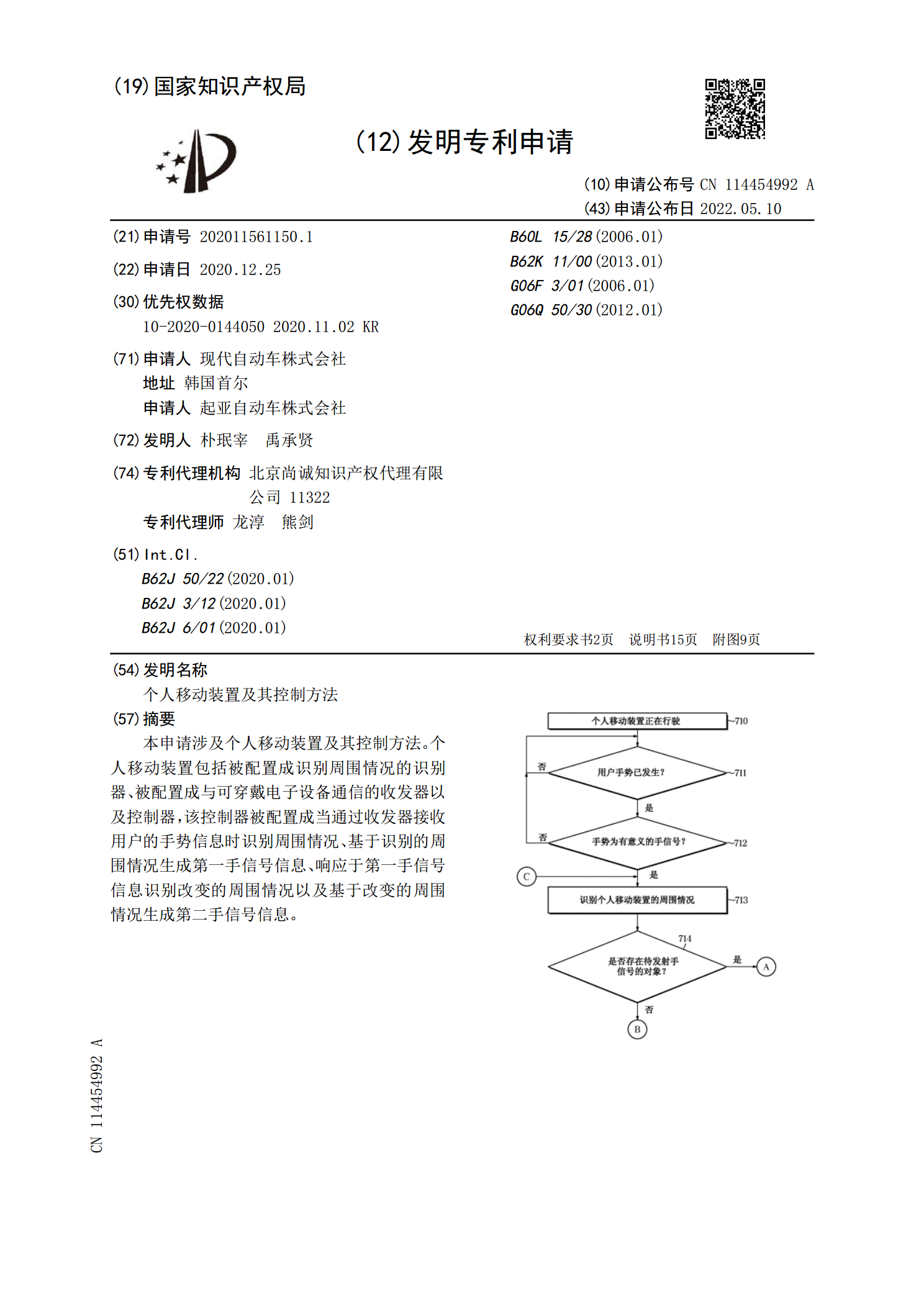
个人移动装置及其控制方法.pdf
本申请涉及个人移动装置及其控制方法。个人移动装置包括被配置成识别周围情况的识别器、被配置成与可穿戴电子设备通信的收发器以及控制器,该控制器被配置成当通过收发器接收用户的手势信息时识别周围情况、基于识别的周围情况生成第一手信号信息、响应于第一手信号信息识别改变的周围情况以及基于改变的周围情况生成第二手信号信息。
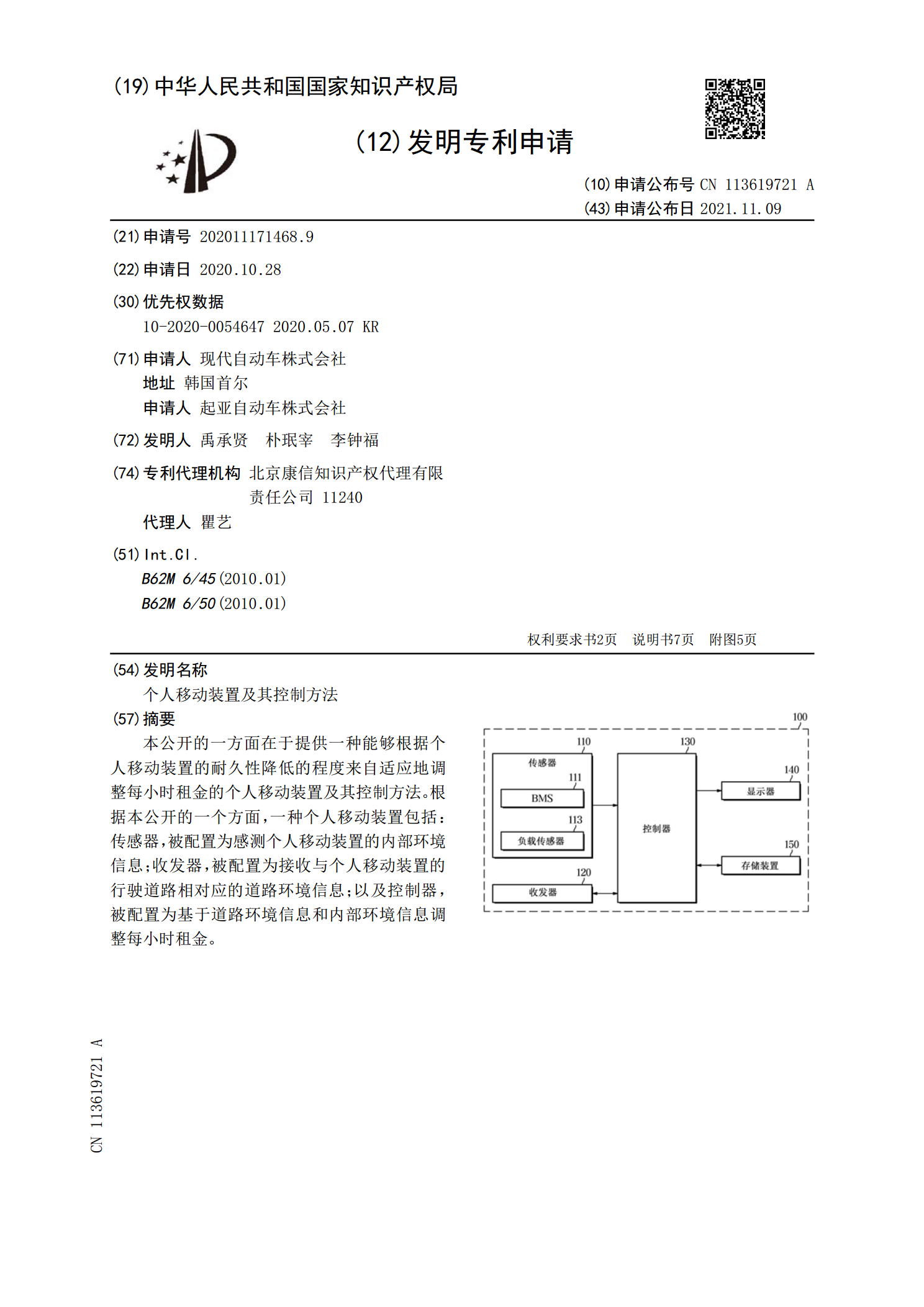
个人移动装置及其控制方法.pdf
本公开的一方面在于提供一种能够根据个人移动装置的耐久性降低的程度来自适应地调整每小时租金的个人移动装置及其控制方法。根据本公开的一个方面,一种个人移动装置包括:传感器,被配置为感测个人移动装置的内部环境信息;收发器,被配置为接收与个人移动装置的行驶道路相对应的道路环境信息;以及控制器,被配置为基于道路环境信息和内部环境信息调整每小时租金。
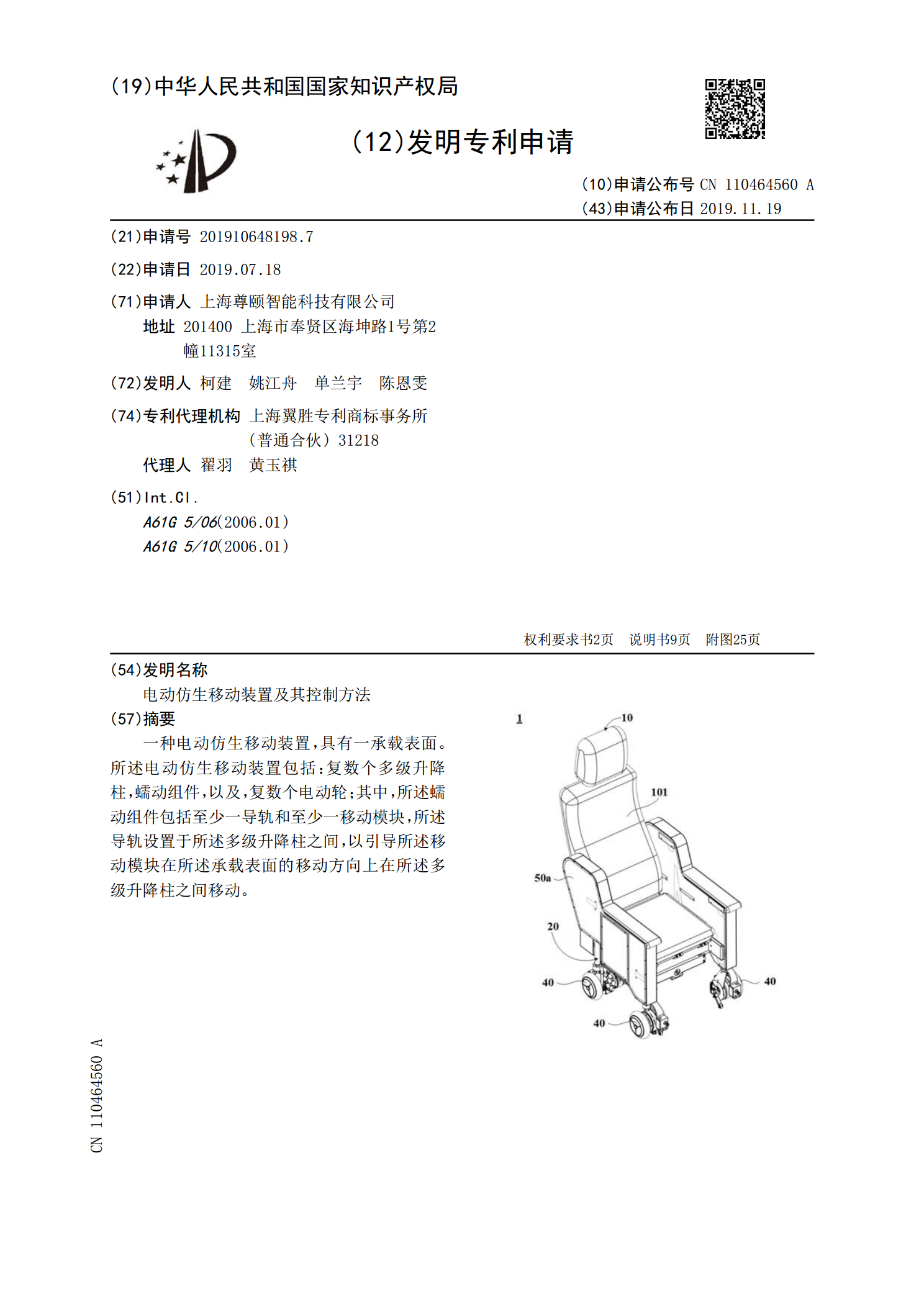
电动仿生移动装置及其控制方法.pdf
一种电动仿生移动装置,具有一承载表面。所述电动仿生移动装置包括:复数个多级升降柱,蠕动组件,以及,复数个电动轮;其中,所述蠕动组件包括至少一导轨和至少一移动模块,所述导轨设置于所述多级升降柱之间,以引导所述移动模块在所述承载表面的移动方向上在所述多级升降柱之间移动。