
电动仿生移动装置及其控制方法.pdf

论文****轩吖


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电动仿生移动装置及其控制方法.pdf
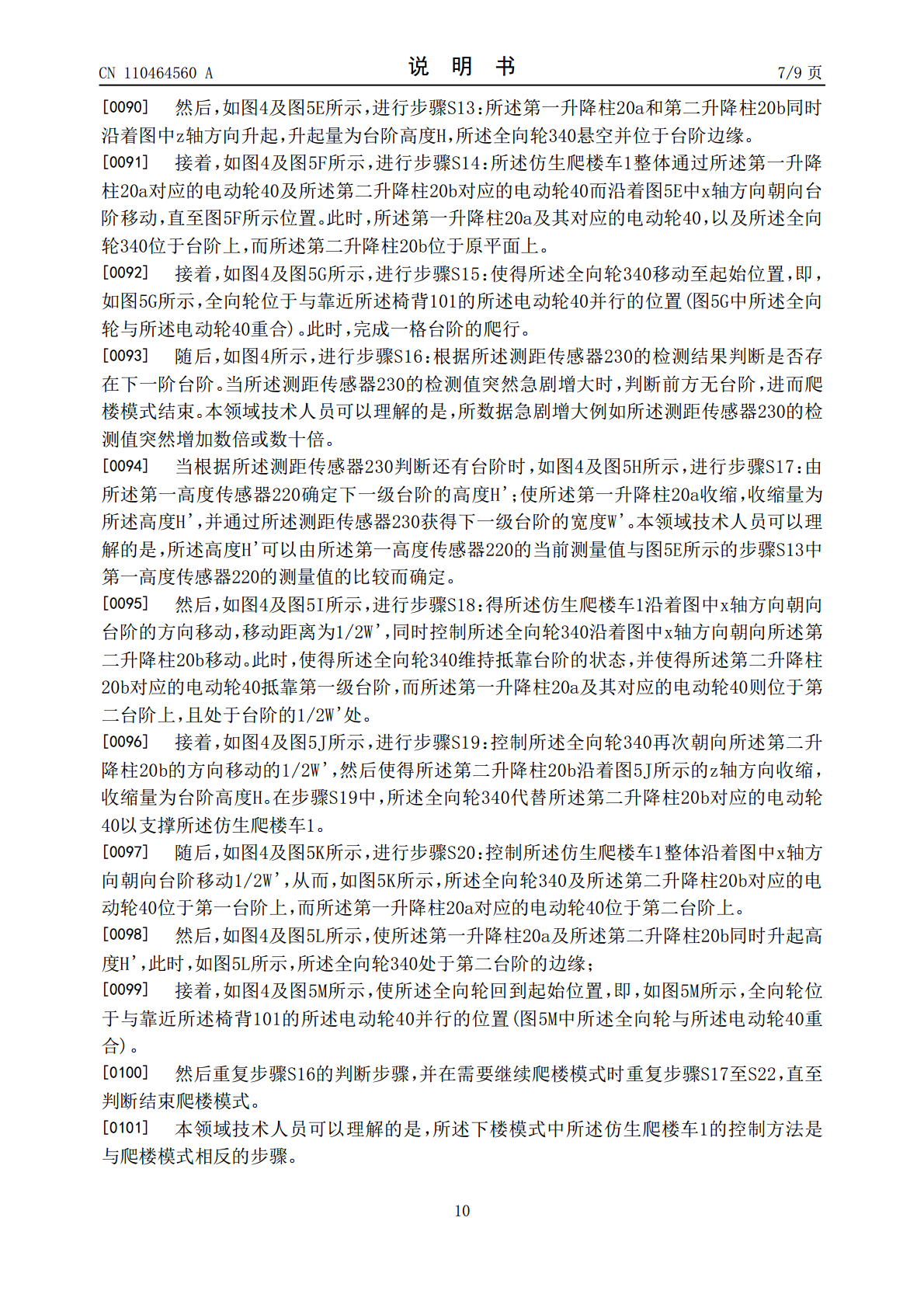
一种电动仿生移动装置,具有一承载表面。所述电动仿生移动装置包括:复数个多级升降柱,蠕动组件,以及,复数个电动轮;其中,所述蠕动组件包括至少一导轨和至少一移动模块,所述导轨设置于所述多级升降柱之间,以引导所述移动模块在所述承载表面的移动方向上在所述多级升降柱之间移动。
个人移动装置及其控制方法.pdf
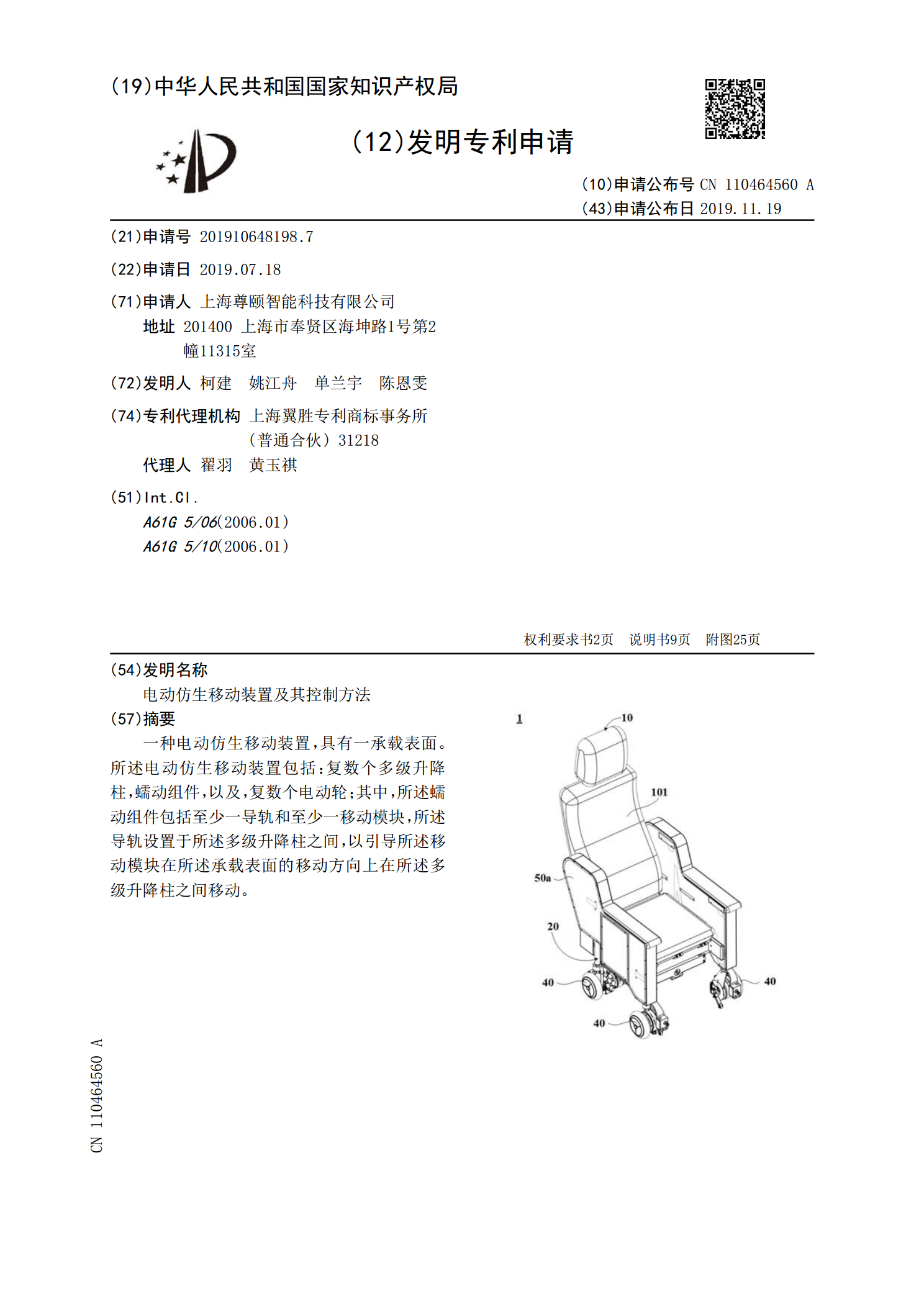
本申请涉及个人移动装置及其控制方法。个人移动装置包括被配置成识别周围情况的识别器、被配置成与可穿戴电子设备通信的收发器以及控制器,该控制器被配置成当通过收发器接收用户的手势信息时识别周围情况、基于识别的周围情况生成第一手信号信息、响应于第一手信号信息识别改变的周围情况以及基于改变的周围情况生成第二手信号信息。
个人移动装置及其控制方法.pdf
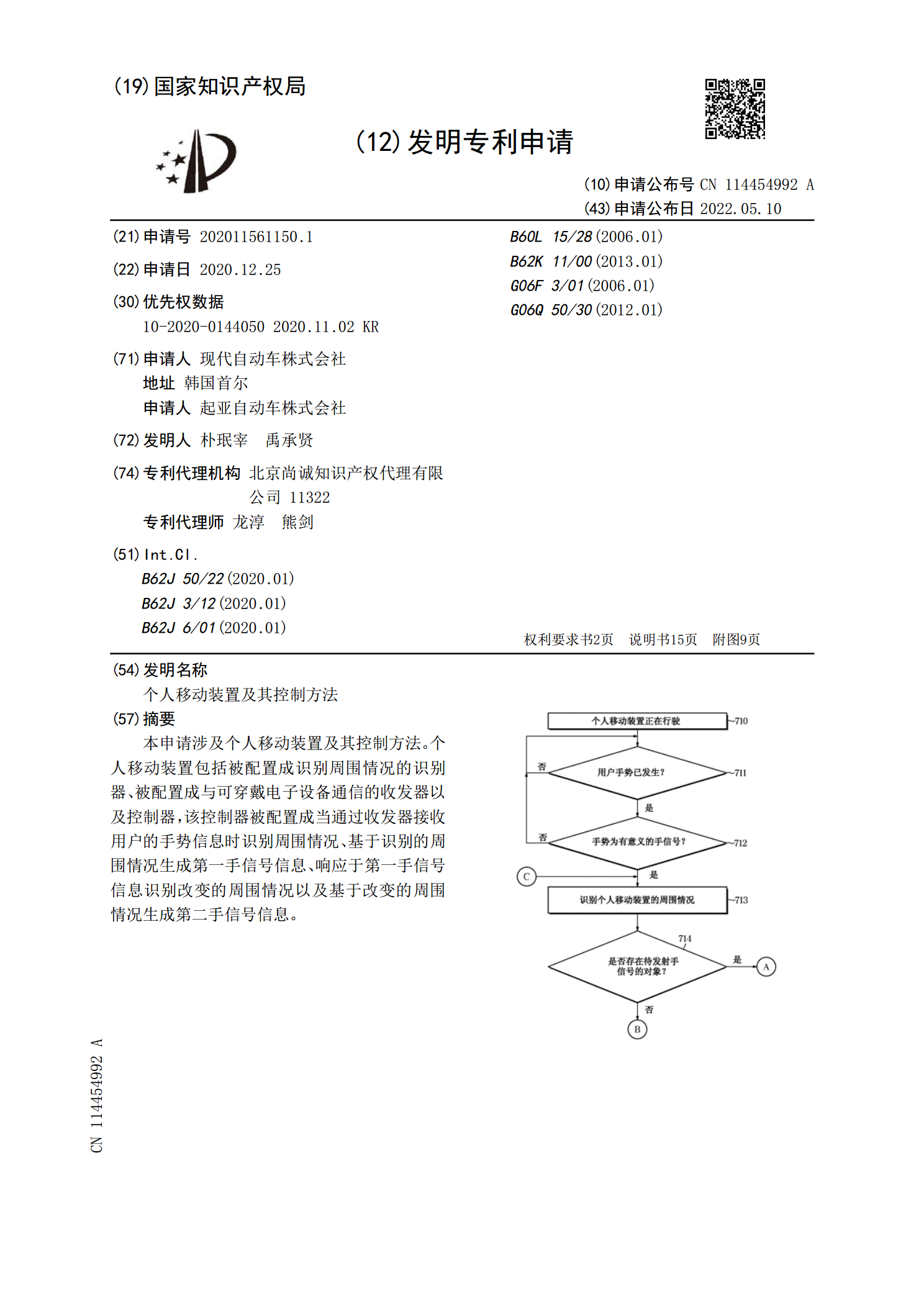
本公开的一方面在于提供一种能够根据个人移动装置的耐久性降低的程度来自适应地调整每小时租金的个人移动装置及其控制方法。根据本公开的一个方面,一种个人移动装置包括:传感器,被配置为感测个人移动装置的内部环境信息;收发器,被配置为接收与个人移动装置的行驶道路相对应的道路环境信息;以及控制器,被配置为基于道路环境信息和内部环境信息调整每小时租金。
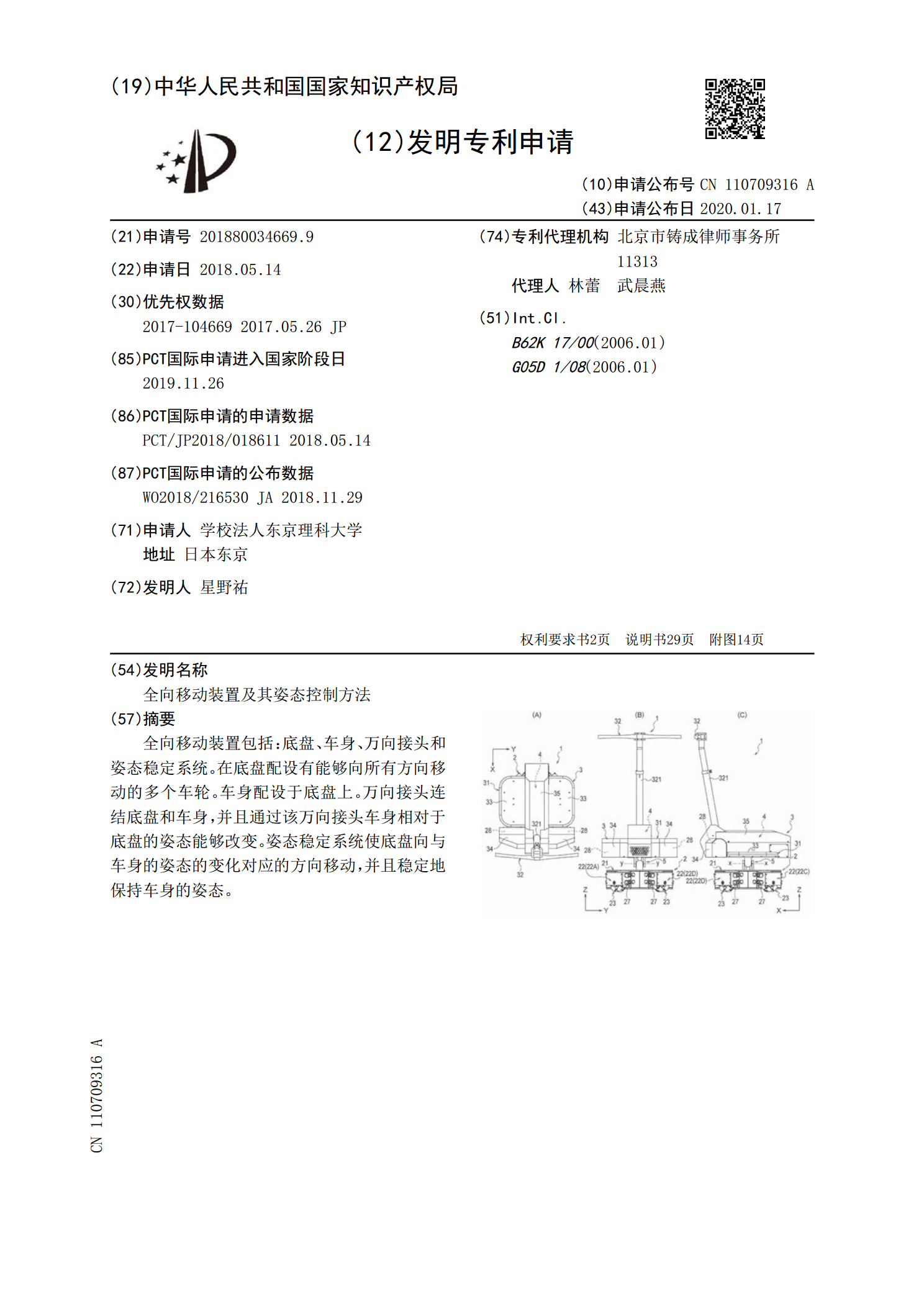
全向移动装置及其姿态控制方法.pdf
全向移动装置包括:底盘、车身、万向接头和姿态稳定系统。在底盘配设有能够向所有方向移动的多个车轮。车身配设于底盘上。万向接头连结底盘和车身,并且通过该万向接头车身相对于底盘的姿态能够改变。姿态稳定系统使底盘向与车身的姿态的变化对应的方向移动,并且稳定地保持车身的姿态。
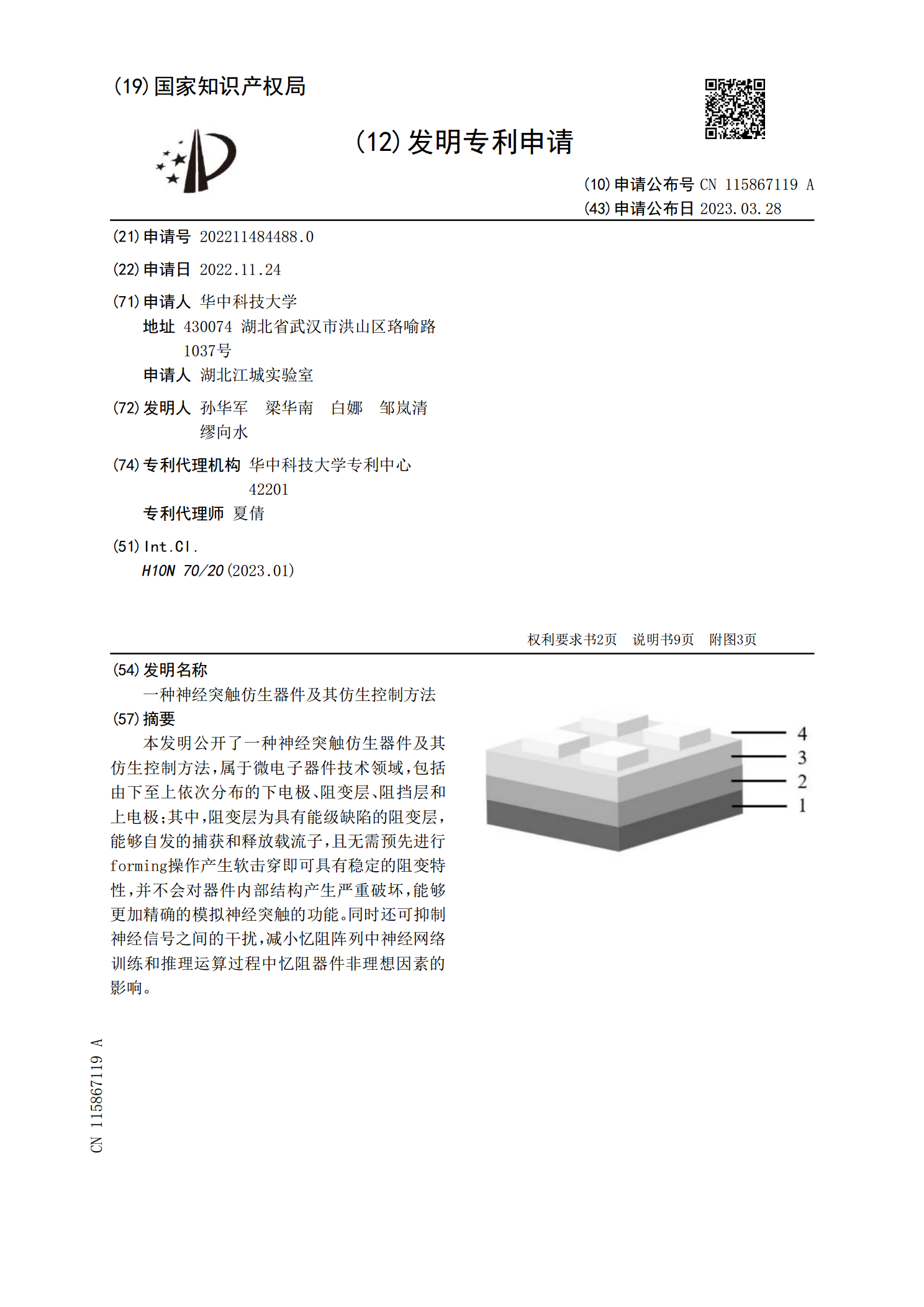
一种神经突触仿生器件及其仿生控制方法.pdf
本发明公开了一种神经突触仿生器件及其仿生控制方法,属于微电子器件技术领域,包括由下至上依次分布的下电极、阻变层、阻挡层和上电极;其中,阻变层为具有能级缺陷的阻变层,能够自发的捕获和释放载流子,且无需预先进行forming操作产生软击穿即可具有稳定的阻变特性,并不会对器件内部结构产生严重破坏,能够更加精确的模拟神经突触的功能。同时还可抑制神经信号之间的干扰,减小忆阻阵列中神经网络训练和推理运算过程中忆阻器件非理想因素的影响。