
用于车辆到车辆通信和全轮驱动断开的系统和方法.pdf

文阁****23

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于车辆到车辆通信和全轮驱动断开的系统和方法.pdf
提供用于确定车辆中全轮驱动(AWD)组件的连接状态的方法、设备和系统。方法包括,由车辆接收指示危险和道路上危险位置的消息,以及确定从车辆到危险位置的距离。响应于距危险位置的距离低于第一阈值距离,将车辆中的AWD组件的状态设置为连接状态。响应于距危险位置的距离高于第一阈值,确定车辆到达危险位置的时间。如果到达危险位置的时间低于阈值AWD连接时间,将AWD组件的状态设置为连接状态。
用于车辆的驱动系统和车辆.pdf
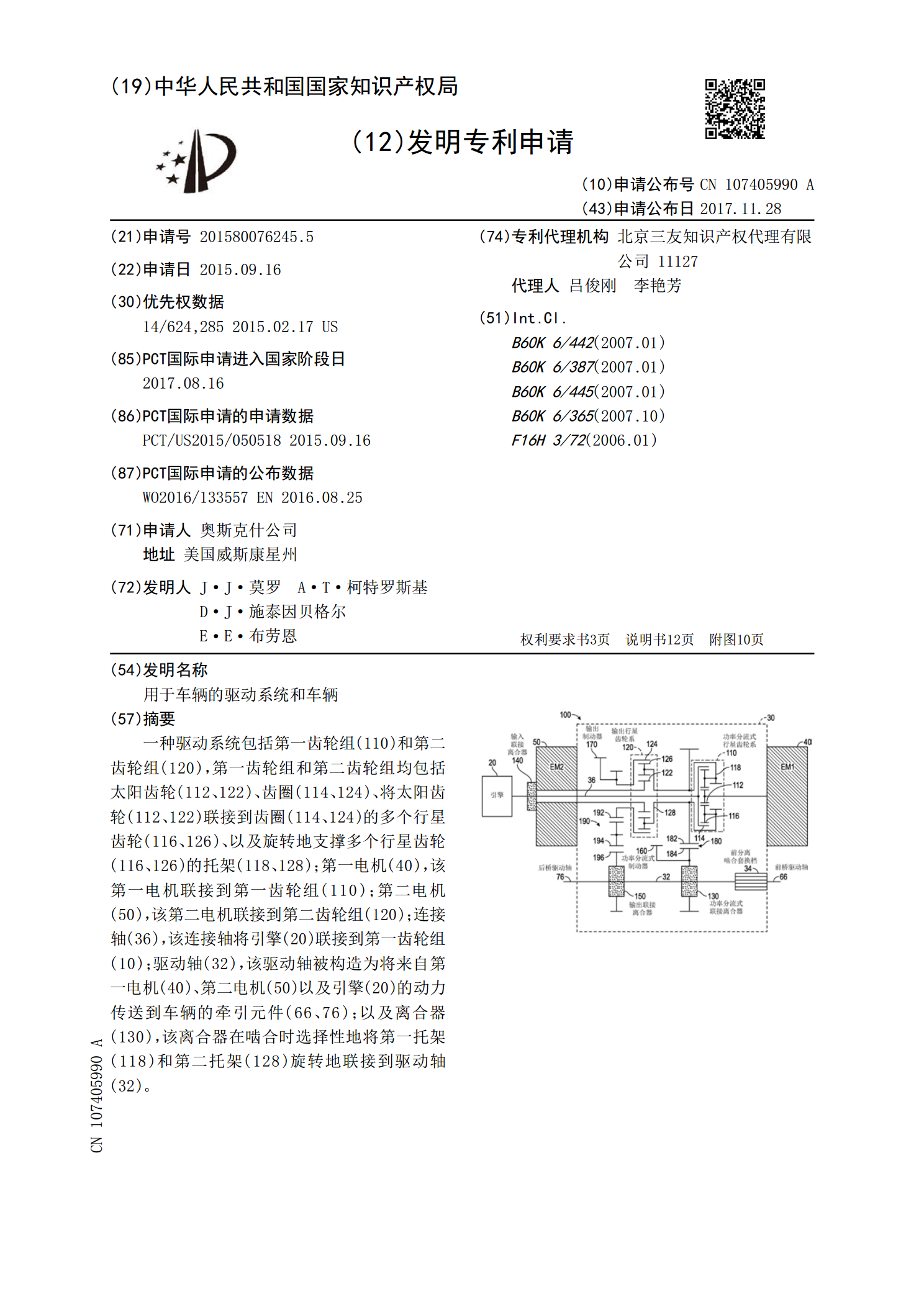
一种驱动系统包括第一齿轮组(110)和第二齿轮组(120),第一齿轮组和第二齿轮组均包括太阳齿轮(112、122)、齿圈(114、124)、将太阳齿轮(112、122)联接到齿圈(114、124)的多个行星齿轮(116、126)、以及旋转地支撑多个行星齿轮(116、126)的托架(118、128);第一电机(40),该第一电机联接到第一齿轮组(110);第二电机(50),该第二电机联接到第二齿轮组(120);连接轴(36),该连接轴将引擎(20)联接到第一齿轮组(10);驱动轴(32),该驱动轴被构造为将

车辆的驱动装置和用于驱动车辆的方法.pdf
本发明涉及一种车辆的驱动装置(1),包括两个经由一行星齿轮传动机构(6)接合的电机(2、3)以及一个与所述行星齿轮传动机构(6)接合的用于车轮驱动的车轴驱动单元(10),其中,用于行星齿轮传动机构(6)的太阳轮(7)的驱动轴(4)与第一电机(2)相接合,而用于行星齿轮传动机构(6)的内齿轮(8)的驱动轴(5)与第二电机(3)相接合。在按照本发明的用于驱动车辆的方法中,所述太阳轮(7)和所述内齿轮(8)在一个起动阶段彼此反向旋转。由此使得各电机在启动之前便已经在一特性曲线区域内以较高的转矩运行,这样,在相对

用于控制四轮驱动车辆的系统和方法.pdf
本发明涉及一种四轮驱动混合车辆,该车辆在每个车轮副上设置有至少一个动力传动系,即包括至少一个热机的第一动力传动系(1)和包括至少一个电动机的第二动力传动系(2),该车辆还设置有传感器(7)和位于每个驱动车轮上的摩擦制动系统。该控制系统包括:用于在摩擦制动系统与动力传动系的至少一个电动机之间分配制动请求的装置(9),所述电动机能传递阻抗转矩;转矩指令调整装置(10),其用于根据来自传感器的信号调整用于制动系统和用于动力传动系的转矩指令;动力传动系控制装置(8);所述分配装置(9)、转矩指令调整装置(10)和

用于四轮驱动车辆传动系的方法和系统.pdf
本发明公开了一种改善混合动力车辆的运转的系统和方法。在一个示例中,响应于以四轮驱动低速挡位范围运转混合动力车辆而可以调节传动系运转。该方法可以改善车辆驾驶性能并减小传动系劣化。