
分布式驱动电动汽车路面自适应驱动防滑控制方法及系统.pdf

葫芦****io


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

分布式驱动电动汽车路面自适应驱动防滑控制方法及系统.pdf
本发明涉及一种分布式驱动电动汽车路面自适应驱动防滑控制方法及系统,属于车辆控制技术领域。本发明通过实时估算出当前路面峰值附着系数,根据当前路面峰值附着系数与当前路面最优滑移率对应的线性关系,得出当前路面的最优滑移率,再结合当前车轮的轮心速度,确定当前车轮的参考轮速,计算出实际轮速与参考轮速的差值,依据轮速差,利用滑模变结构控制器,对驱动状态下打滑的车轮进行力矩控制,保证了将车轮滑移率控制到当前路面最优滑移率。本发明将车轮滑移率控制到当前路面最优滑移率,实现对车轮的防滑驱动的自适控制。

一种分布式驱动电动汽车路面自适应防滑控制系统及方法.pdf
本发明涉及一种分布式驱动电动汽车路面自适应防滑控制系统及方法,该系统包括电机控制器、电机力矩分配器、实测传感器单元、非线性路面估计单元、防滑控制选择性接入单元和驱动防滑控制单元,非线性路面估计单元用于获取每个车轮的路面峰值附着系数,驱动防滑控制单元根据非线性路面估计单元获取的车轮的路面峰值附着系数以及实测传感器单元的实测数据进行防滑控制输出控制力矩,防滑控制选择性接入单元根据驱动防滑控制单元输出控制力矩、电机力矩分配器的分配力矩以及实测传感器单元的实测数据进行逻辑判断进而输出控制力矩或分配力矩至电机控制器
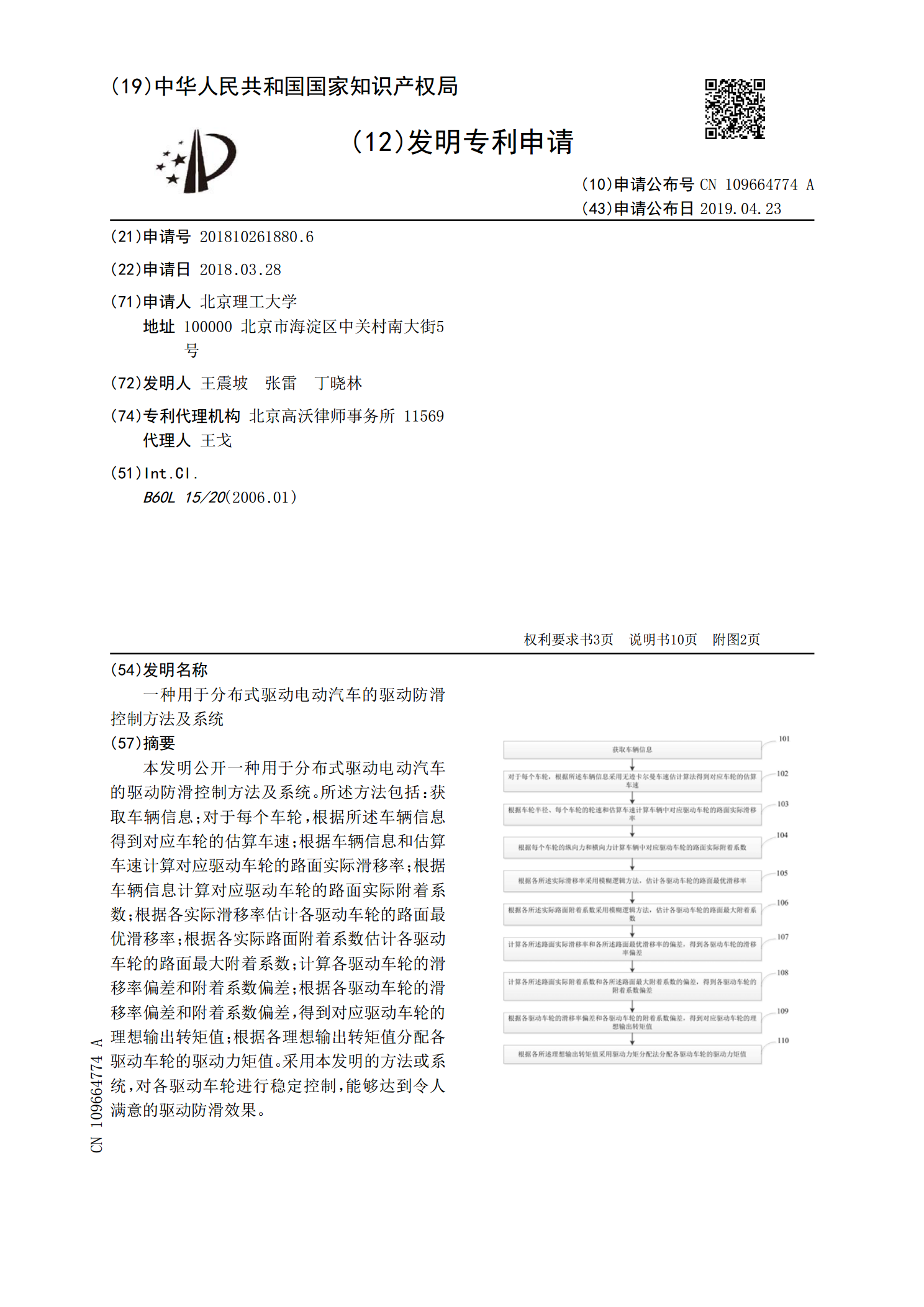
一种用于分布式驱动电动汽车的驱动防滑控制方法及系统.pdf
本发明公开一种用于分布式驱动电动汽车的驱动防滑控制方法及系统。所述方法包括:获取车辆信息;对于每个车轮,根据所述车辆信息得到对应车轮的估算车速;根据车辆信息和估算车速计算对应驱动车轮的路面实际滑移率;根据车辆信息计算对应驱动车轮的路面实际附着系数;根据各实际滑移率估计各驱动车轮的路面最优滑移率;根据各实际路面附着系数估计各驱动车轮的路面最大附着系数;计算各驱动车轮的滑移率偏差和附着系数偏差;根据各驱动车轮的滑移率偏差和附着系数偏差,得到对应驱动车轮的理想输出转矩值;根据各理想输出转矩值分配各驱动车轮的驱动
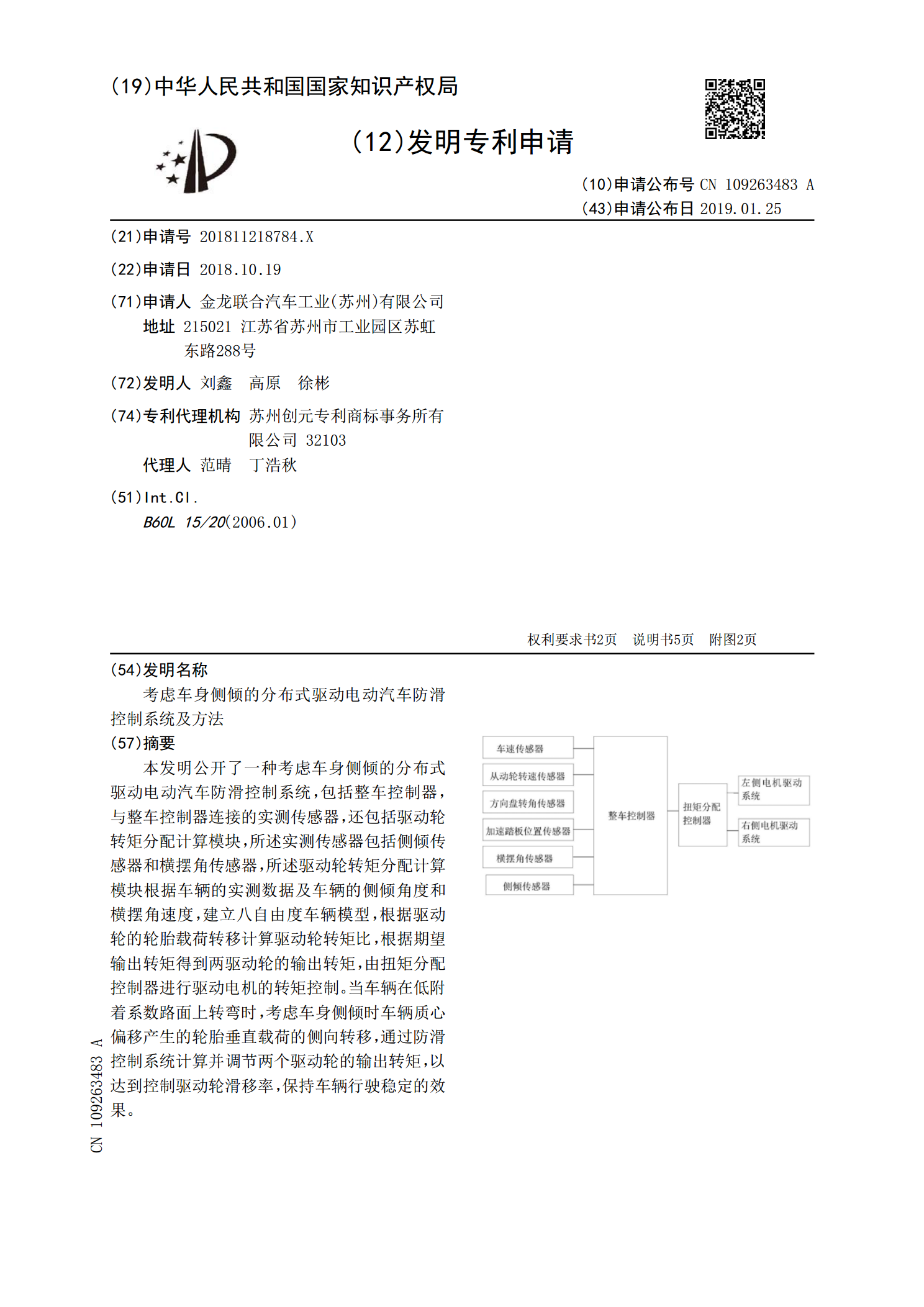
考虑车身侧倾的分布式驱动电动汽车防滑控制系统及方法.pdf
本发明公开了一种考虑车身侧倾的分布式驱动电动汽车防滑控制系统,包括整车控制器,与整车控制器连接的实测传感器,还包括驱动轮转矩分配计算模块,所述实测传感器包括侧倾传感器和横摆角传感器,所述驱动轮转矩分配计算模块根据车辆的实测数据及车辆的侧倾角度和横摆角速度,建立八自由度车辆模型,根据驱动轮的轮胎载荷转移计算驱动轮转矩比,根据期望输出转矩得到两驱动轮的输出转矩,由扭矩分配控制器进行驱动电机的转矩控制。当车辆在低附着系数路面上转弯时,考虑车身侧倾时车辆质心偏移产生的轮胎垂直载荷的侧向转移,通过防滑控制系统计算并

分布式驱动电动汽车的驱动防滑研究的开题报告.docx
分布式驱动电动汽车的驱动防滑研究的开题报告一、研究背景随着电动汽车的快速发展,越来越多的人开始选择购买这种环保、低碳、经济的出行方式。然而,电动汽车在实际驾驶过程中,仍然存在着一些技术难题,其中之一就是驱动防滑方面的问题。因此,本文旨在研究分布式驱动电动汽车的驱动防滑技术,以提高电动汽车的行驶安全性和驾驶体验。二、研究目的本文旨在研究分布式驱动电动汽车的驱动防滑技术,探讨其原理及应用,通过实验对该技术进行验证和分析,最终得出该技术的可行性和优越性,为电动汽车的发展提供具有实际应用价值的参考意见。三、研究内