
考虑车身侧倾的分布式驱动电动汽车防滑控制系统及方法.pdf

悠柔****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
考虑车身侧倾的分布式驱动电动汽车防滑控制系统及方法.pdf
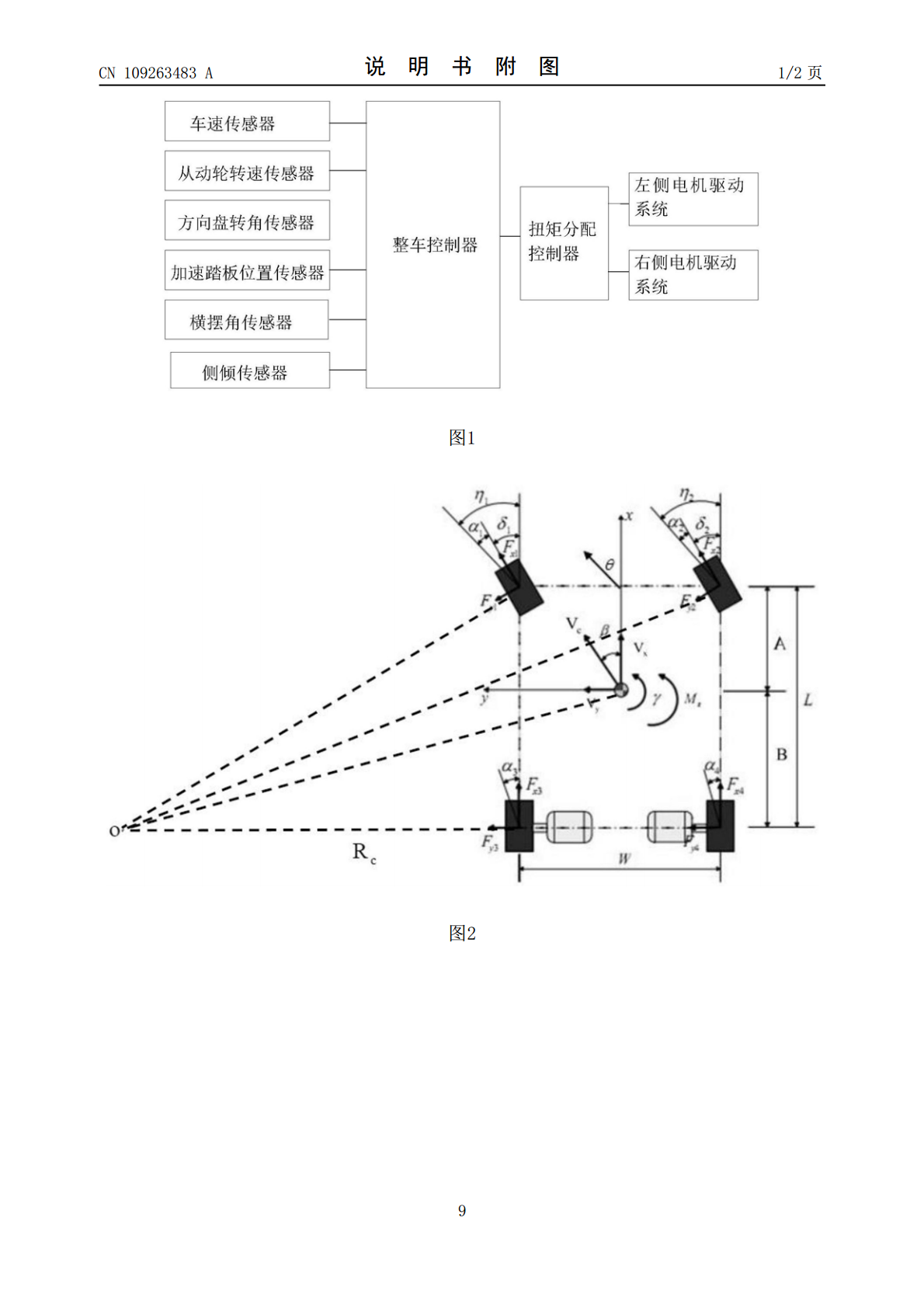
本发明公开了一种考虑车身侧倾的分布式驱动电动汽车防滑控制系统,包括整车控制器,与整车控制器连接的实测传感器,还包括驱动轮转矩分配计算模块,所述实测传感器包括侧倾传感器和横摆角传感器,所述驱动轮转矩分配计算模块根据车辆的实测数据及车辆的侧倾角度和横摆角速度,建立八自由度车辆模型,根据驱动轮的轮胎载荷转移计算驱动轮转矩比,根据期望输出转矩得到两驱动轮的输出转矩,由扭矩分配控制器进行驱动电机的转矩控制。当车辆在低附着系数路面上转弯时,考虑车身侧倾时车辆质心偏移产生的轮胎垂直载荷的侧向转移,通过防滑控制系统计算并
考虑驾驶员意图分布式驱动电动汽车防滑控制系统及方法.pdf
本发明涉及一种考虑驾驶员意图分布式驱动电动汽车防滑控制系统及方法,该系统包括电机控制器、驾驶员意图力矩获取单元、路面附着系数估计单元和驱动防滑控制单元,所述的电机控制器连接分布式驱动电动汽车的4个车轮的驱动电机,所述的驾驶员意图力矩获取单元和路面附着系数估计单元均连接驱动防滑控制单元,所述的驱动防滑控制单元连接电机控制器;所述的路面附着系数估计器获取车轮路面峰值附着系数,所述的驾驶员意图力矩获取单元获取驾驶员意图力矩,所述的驱动防滑控制器根据路面峰值附着系数和驾驶员意图力矩进行控制并输出控制力矩至电机控制

一种分布式驱动电动汽车路面自适应防滑控制系统及方法.pdf
本发明涉及一种分布式驱动电动汽车路面自适应防滑控制系统及方法,该系统包括电机控制器、电机力矩分配器、实测传感器单元、非线性路面估计单元、防滑控制选择性接入单元和驱动防滑控制单元,非线性路面估计单元用于获取每个车轮的路面峰值附着系数,驱动防滑控制单元根据非线性路面估计单元获取的车轮的路面峰值附着系数以及实测传感器单元的实测数据进行防滑控制输出控制力矩,防滑控制选择性接入单元根据驱动防滑控制单元输出控制力矩、电机力矩分配器的分配力矩以及实测传感器单元的实测数据进行逻辑判断进而输出控制力矩或分配力矩至电机控制器

车身侧倾驱动机构及应用该机构的车辆.pdf
本发明涉及车辆底盘技术领域,公开了一种车身侧倾驱动机构及应用该机构的车辆,车身侧倾驱动机构包括:车架、车身、左曲柄、左连杆、右曲柄、右连杆、左齿轮、中齿轮、右齿轮,车身与车架绕侧倾轴线转动连接,由左曲柄、左连杆和右曲柄、右连杆组成两组联接车身与车架的运动链,左、中、右三个齿轮啮合传动,左齿轮、左曲柄和右齿轮、右曲柄同方向等角度转动,致动器驱动中齿轮转动,通过双路串联运动链驱动车身侧倾运动,闭式传动回路消除传动间隙、减小运动冲击,提高侧倾过程车辆的稳定性和可靠性,应用于车辆在过弯时或者驶过倾斜路面时车身主动

分布式驱动电动汽车路面自适应驱动防滑控制方法及系统.pdf
本发明涉及一种分布式驱动电动汽车路面自适应驱动防滑控制方法及系统,属于车辆控制技术领域。本发明通过实时估算出当前路面峰值附着系数,根据当前路面峰值附着系数与当前路面最优滑移率对应的线性关系,得出当前路面的最优滑移率,再结合当前车轮的轮心速度,确定当前车轮的参考轮速,计算出实际轮速与参考轮速的差值,依据轮速差,利用滑模变结构控制器,对驱动状态下打滑的车轮进行力矩控制,保证了将车轮滑移率控制到当前路面最优滑移率。本发明将车轮滑移率控制到当前路面最优滑移率,实现对车轮的防滑驱动的自适控制。