
具有爬升杆的自动行走的地面处理设备.pdf

黛娥****ak


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
具有爬升杆的自动行走的地面处理设备.pdf
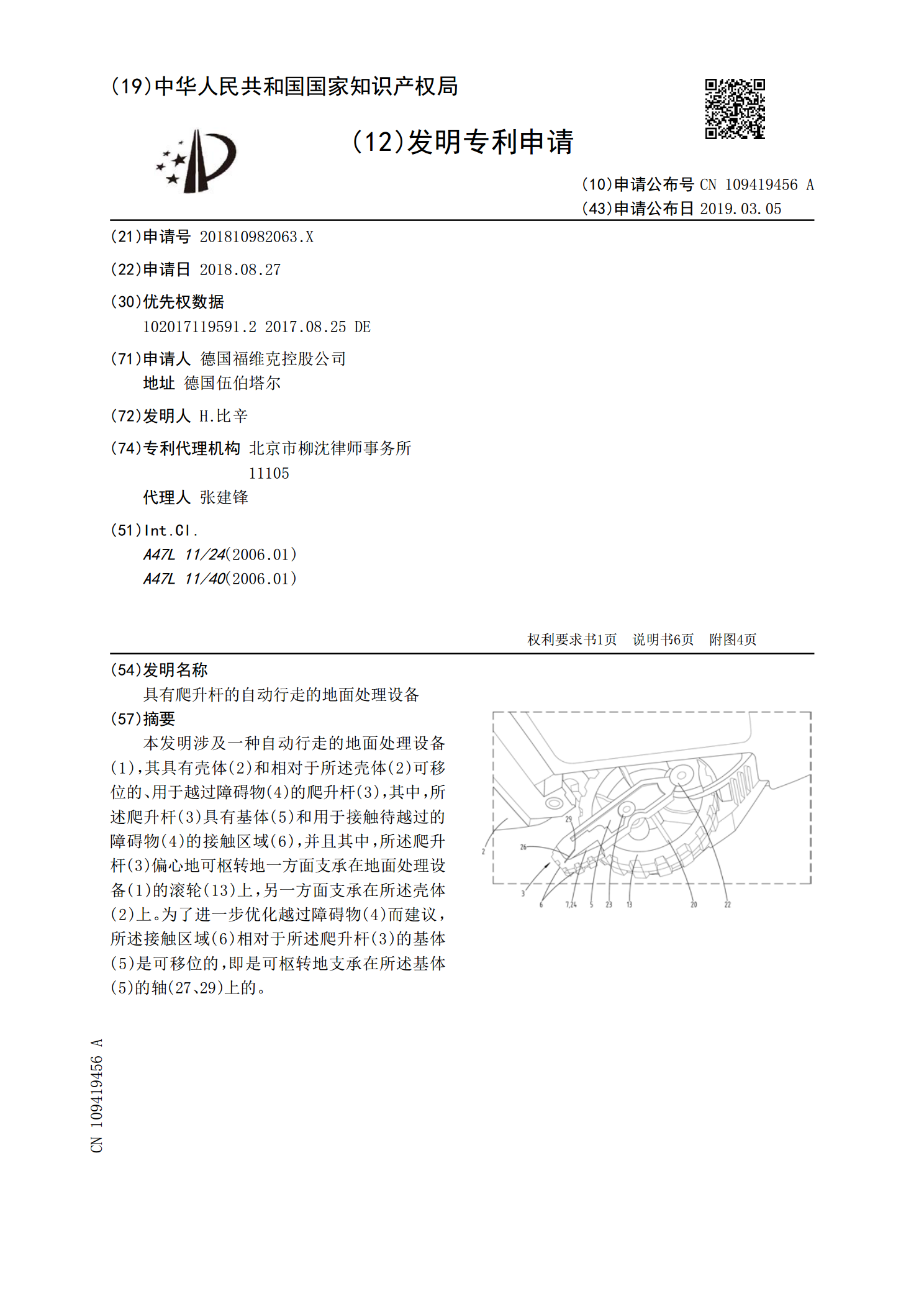
本发明涉及一种自动行走的地面处理设备(1),其具有壳体(2)和相对于所述壳体(2)可移位的、用于越过障碍物(4)的爬升杆(3),其中,所述爬升杆(3)具有基体(5)和用于接触待越过的障碍物(4)的接触区域(6),并且其中,所述爬升杆(3)偏心地可枢转地一方面支承在地面处理设备(1)的滚轮(13)上,另一方面支承在所述壳体(2)上。为了进一步优化越过障碍物(4)而建议,所述接触区域(6)相对于所述爬升杆(3)的基体(5)是可移位的,即是可枢转地支承在所述基体(5)的轴(27、29)上的。
自动行走的地面处理设备.pdf
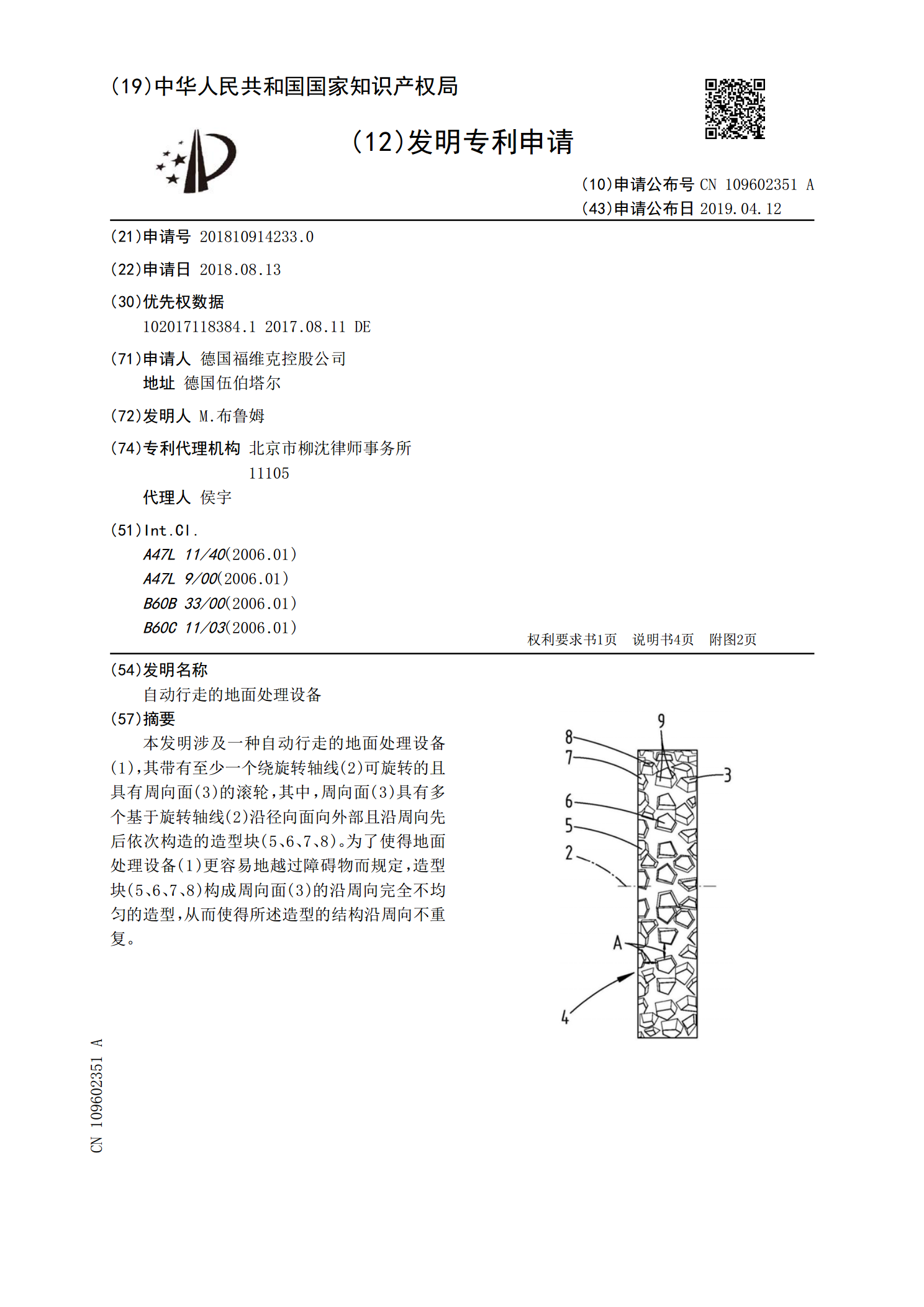
本发明涉及一种自动行走的地面处理设备(1),其带有至少一个绕旋转轴线(2)可旋转的且具有周向面(3)的滚轮,其中,周向面(3)具有多个基于旋转轴线(2)沿径向面向外部且沿周向先后依次构造的造型块(5、6、7、8)。为了使得地面处理设备(1)更容易地越过障碍物而规定,造型块(5、6、7、8)构成周向面(3)的沿周向完全不均匀的造型,从而使得所述造型的结构沿周向不重复。

一种自动爬升行走小车及爬升组件.pdf
本发明公开了一种自动爬升行走小车,包括车架、车轮、升降装置,升降装置中的花键轴设置了在丝母套内轴向限位的限位部,使丝母套能够将花键轴向外推或者向内拉。当花键轴向外延伸后,则能够与将行走小车抬升的装置,如本发明爬升组件中的升降立柱配合。与升降立柱配合后,通过升降电机驱动主动轴转动,从而带动花键轴转动。而花键轴与丝母套之间通过轴承配合,花键轴的转动与丝母套不会产生干涉。故可以通过花键轴的转动与立柱配合达到行走小车的升降状态。

一种具有防坠结构的电力杆架爬升设备.pdf
本实用新型提出一种具有防坠结构的电力杆架爬升设备,包括支承框架,该支承框架设有一对,各支承框架一端通过转动结构相连,其另一端通过转接结构相连,各支承框架底部分别设置有支承底板,该支承底板为弧形,其内侧边缘具有与电力杆架形状适配的配接凹口,其外侧边缘具有支承座板,支承座板向支承底板上方弯折,支承座板内壁安装有电动千斤顶,该电动千斤顶的顶杆沿支承底板的径向延伸,其末端安装有防坠夹板。该爬升设备在支承框架底部的支承底板上设置支承座板,并在支承座板内壁安装电动千斤顶,在电动千斤顶上安装防坠夹板,由电动千斤顶带动防

可自动行进的地面处理设备.pdf
本发明涉及一种可自动行进的地面处理设备(1),尤其一种清洁机器人,其具有地面处理元件(2)、至少两个电机驱动的滚轮(3、4)和用于识别待处理表面的地面类型的探测装置。为了以简单的方式和方法实现地面类型的优化识别而规定,所述探测装置具有摩擦阻力元件(6),在行进运动过程中所述摩擦阻力元件与该表面接触,从而使合成力在参考轴线(7)之外作用在地面处理设备(1)上,其中,所述参考轴线(7)相对于地面处理设备的通过滚轮(3、4)的定向所规定的主运动方向(8)平行地定向,并并且在垂直于所述参考轴线(7)的方向上在滚轮