
自动行走的地面处理设备.pdf

睿德****找我

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动行走的地面处理设备.pdf
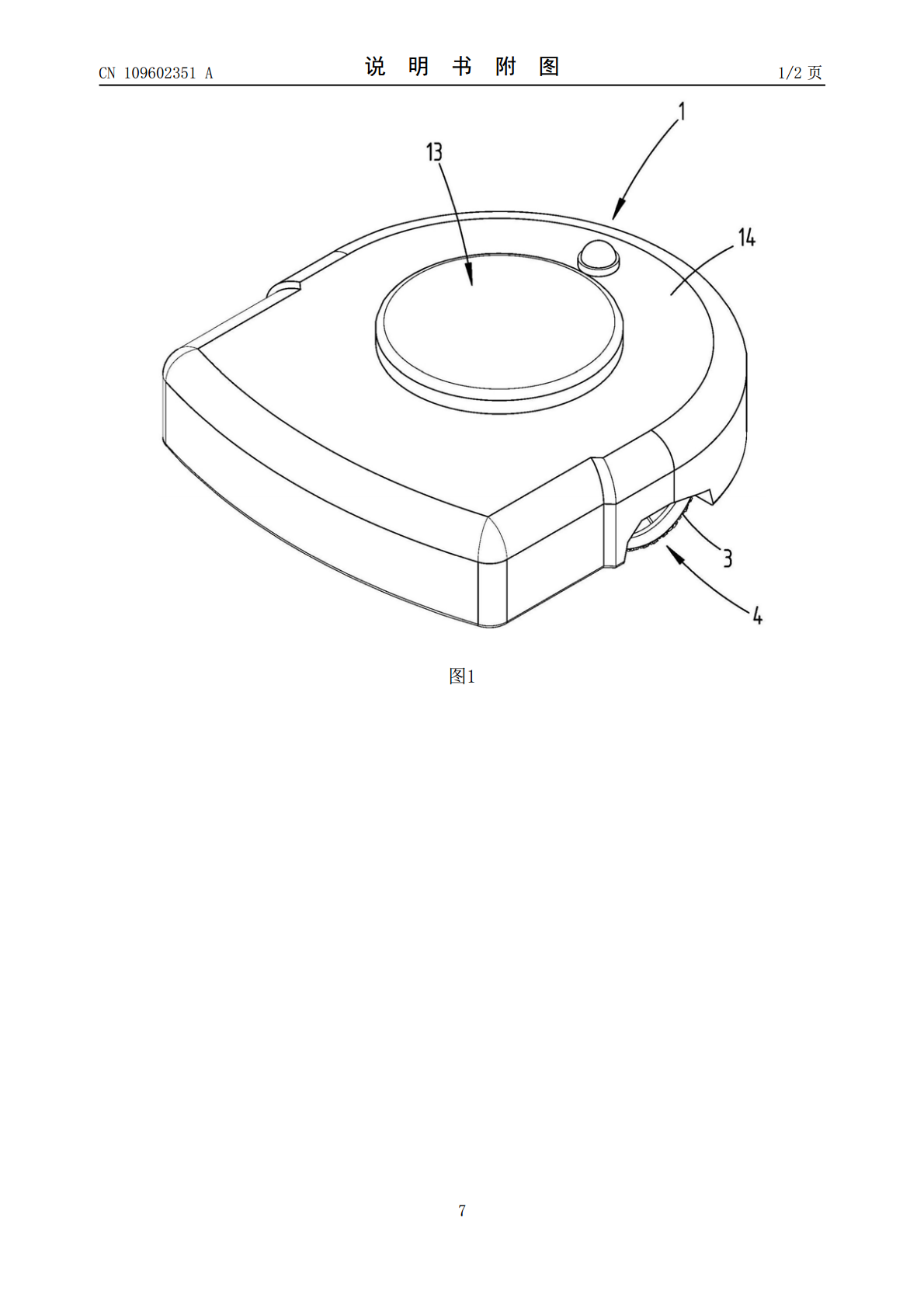
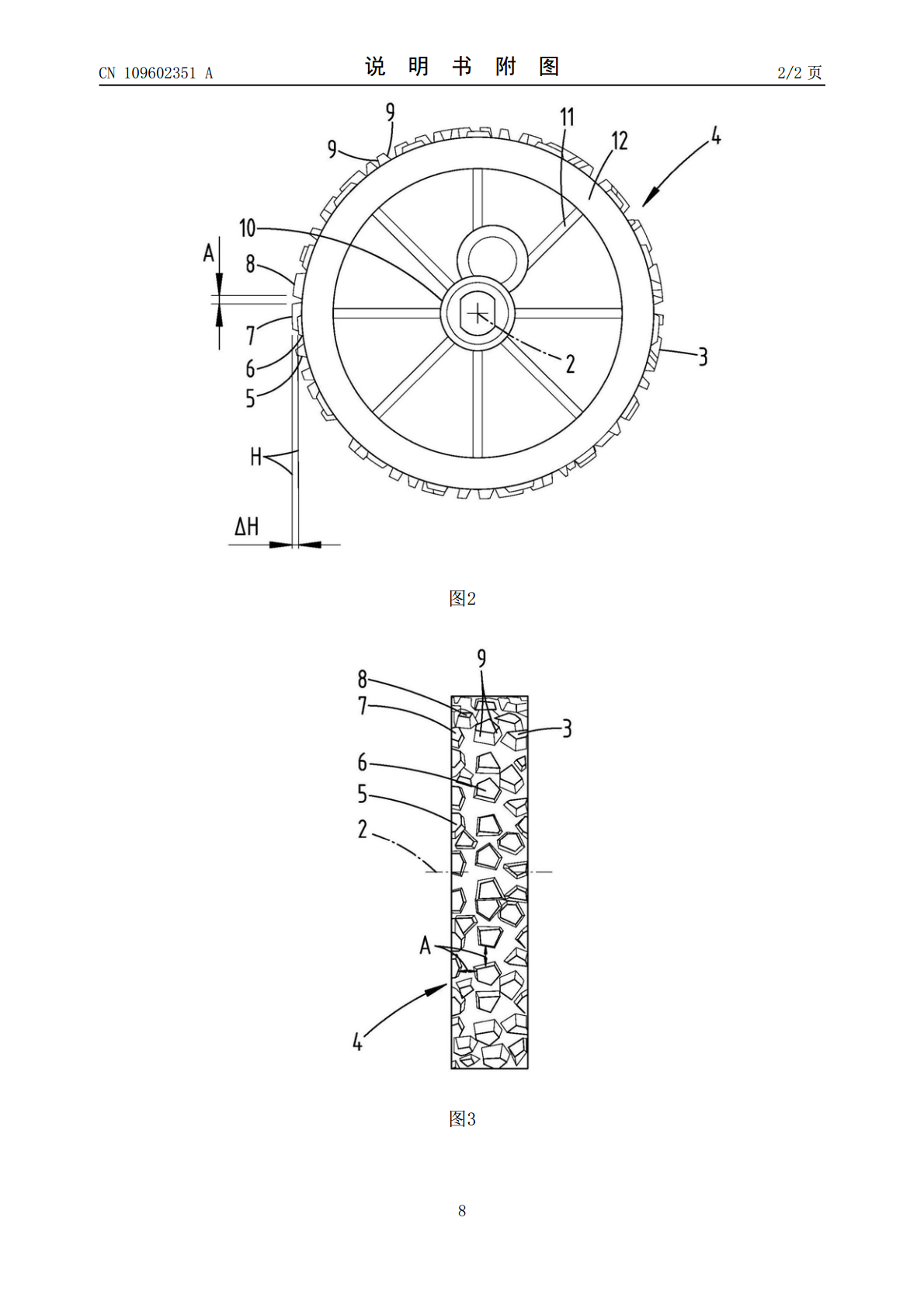
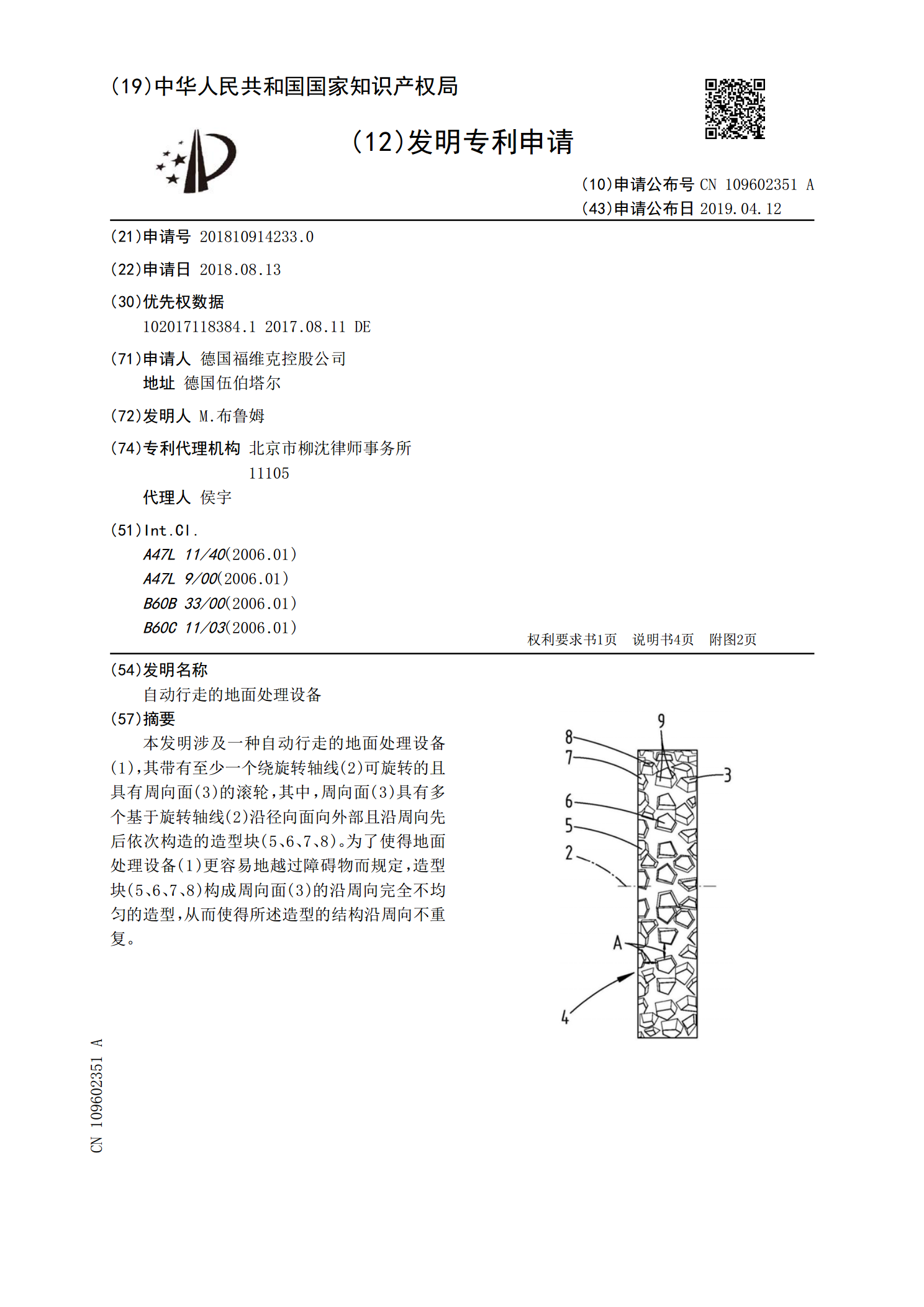
本发明涉及一种自动行走的地面处理设备(1),其带有至少一个绕旋转轴线(2)可旋转的且具有周向面(3)的滚轮,其中,周向面(3)具有多个基于旋转轴线(2)沿径向面向外部且沿周向先后依次构造的造型块(5、6、7、8)。为了使得地面处理设备(1)更容易地越过障碍物而规定,造型块(5、6、7、8)构成周向面(3)的沿周向完全不均匀的造型,从而使得所述造型的结构沿周向不重复。
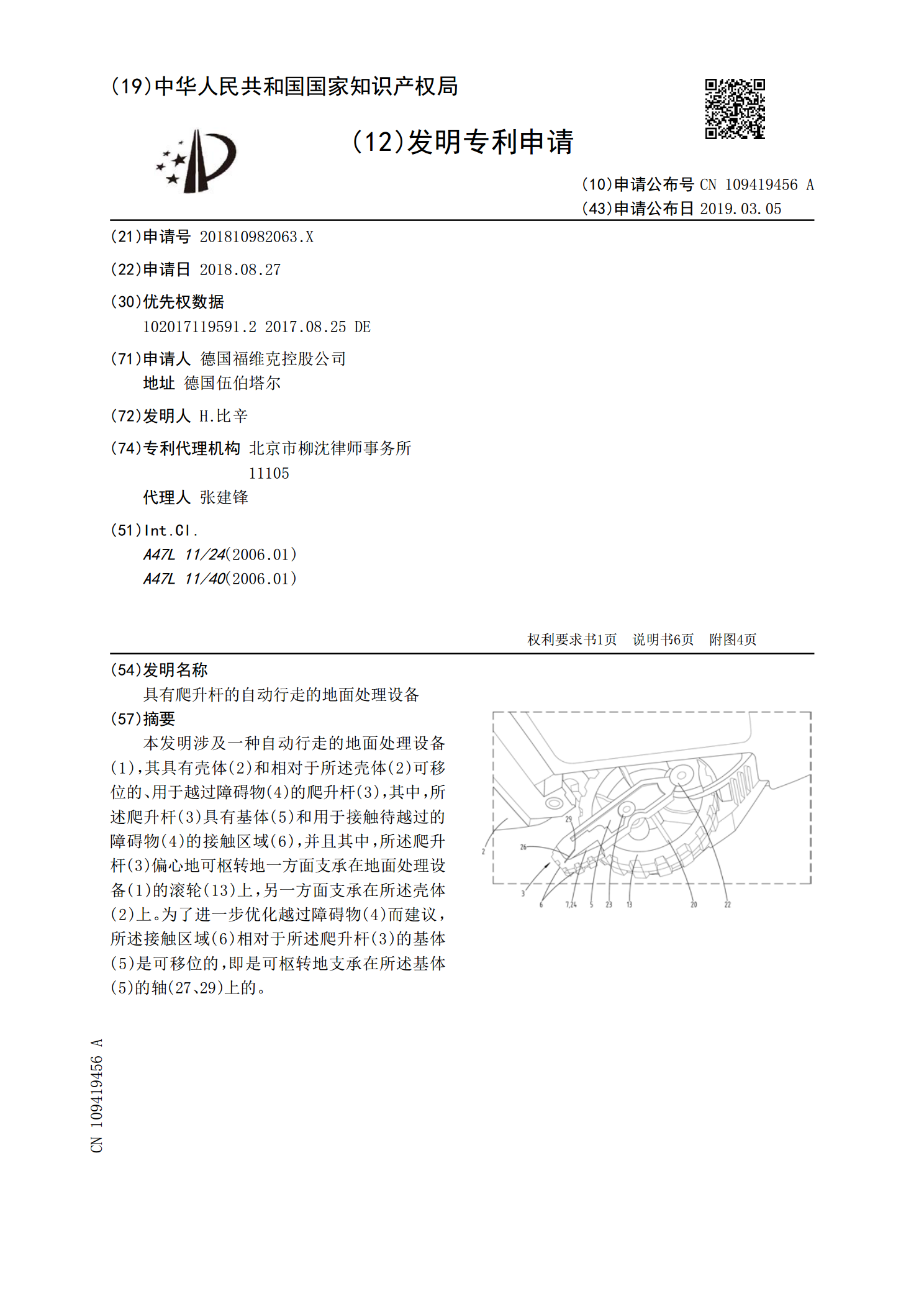
具有爬升杆的自动行走的地面处理设备.pdf
本发明涉及一种自动行走的地面处理设备(1),其具有壳体(2)和相对于所述壳体(2)可移位的、用于越过障碍物(4)的爬升杆(3),其中,所述爬升杆(3)具有基体(5)和用于接触待越过的障碍物(4)的接触区域(6),并且其中,所述爬升杆(3)偏心地可枢转地一方面支承在地面处理设备(1)的滚轮(13)上,另一方面支承在所述壳体(2)上。为了进一步优化越过障碍物(4)而建议,所述接触区域(6)相对于所述爬升杆(3)的基体(5)是可移位的,即是可枢转地支承在所述基体(5)的轴(27、29)上的。

可自动行进的地面处理设备.pdf
本发明涉及一种可自动行进的地面处理设备(1),尤其一种清洁机器人,其具有地面处理元件(2)、至少两个电机驱动的滚轮(3、4)和用于识别待处理表面的地面类型的探测装置。为了以简单的方式和方法实现地面类型的优化识别而规定,所述探测装置具有摩擦阻力元件(6),在行进运动过程中所述摩擦阻力元件与该表面接触,从而使合成力在参考轴线(7)之外作用在地面处理设备(1)上,其中,所述参考轴线(7)相对于地面处理设备的通过滚轮(3、4)的定向所规定的主运动方向(8)平行地定向,并并且在垂直于所述参考轴线(7)的方向上在滚轮

自动行走设备.pdf
一种自动行走设备,包括:机身;控制模块;驱动轮;驱动装置,驱动所述驱动轮转动;驱动轮监测装置,监测所述驱动轮的运动状态并将表征所述驱动轮的运动状态的参数发送给控制模块;机身监测装置,监测所述机身的运动状态,并将表征所述机身的运动状态的参数发送给控制模块,控制模块包括对比部分和控制部分,所述对比部分将驱动轮的运动状态和机身的运动状态与预设的打滑判断条件对比,并将对比结果传递给控制部分。与现有技术相比,本发明的有益效果是:通过设置驱动轮监测装置和辅助轮监测装置,以及相应的控制模块,有效识别自动行走设备是否陷入
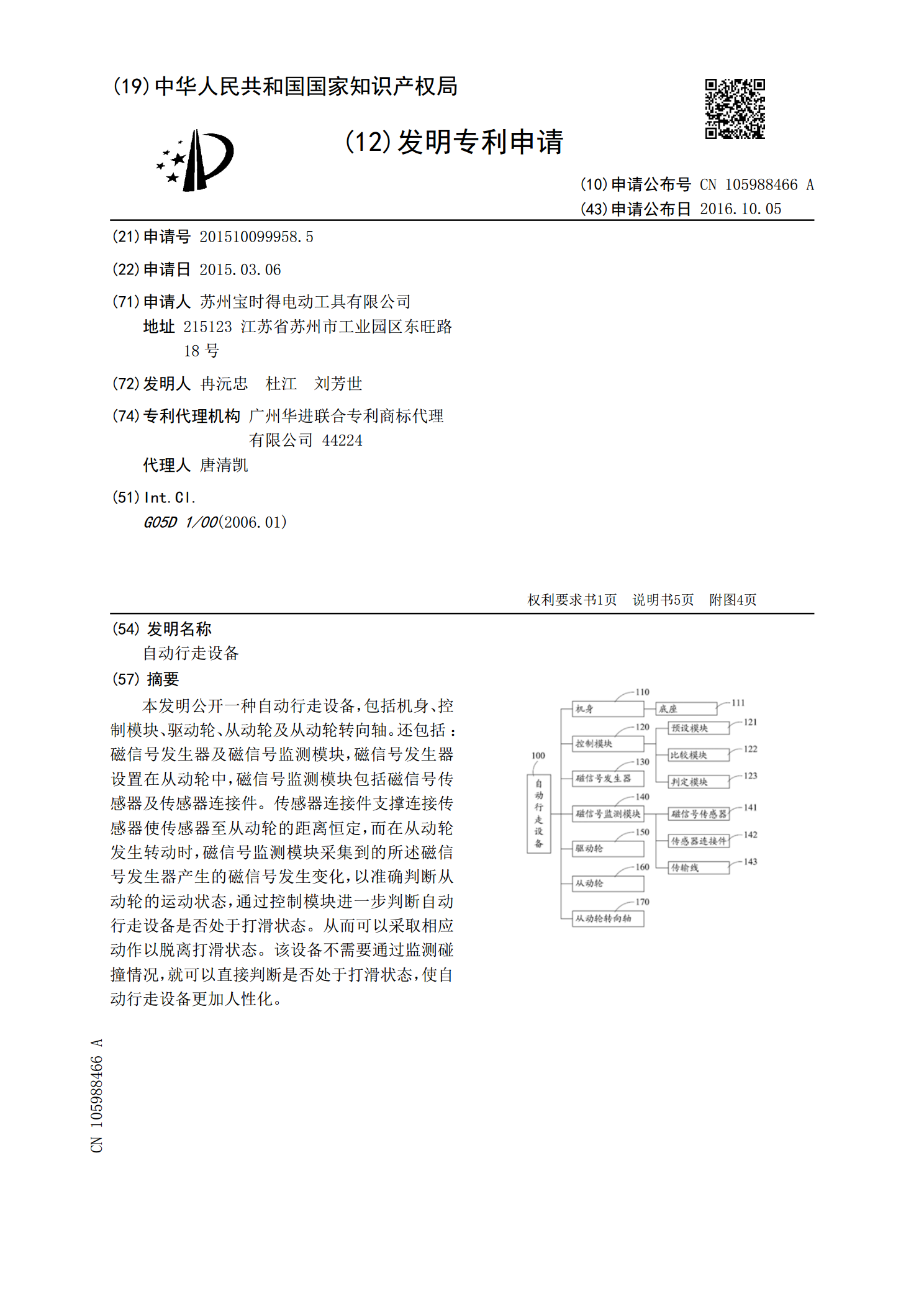
自动行走设备.pdf
本发明公开一种自动行走设备,包括机身、控制模块、驱动轮、从动轮及从动轮转向轴。还包括:磁信号发生器及磁信号监测模块,磁信号发生器设置在从动轮中,磁信号监测模块包括磁信号传感器及传感器连接件。传感器连接件支撑连接传感器使传感器至从动轮的距离恒定,而在从动轮发生转动时,磁信号监测模块采集到的所述磁信号发生器产生的磁信号发生变化,以准确判断从动轮的运动状态,通过控制模块进一步判断自动行走设备是否处于打滑状态。从而可以采取相应动作以脱离打滑状态。该设备不需要通过监测碰撞情况,就可以直接判断是否处于打滑状态,使自动