
两轮联动平衡车及其控制方法.pdf

是来****文章

1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
两轮联动平衡车及其控制方法.pdf
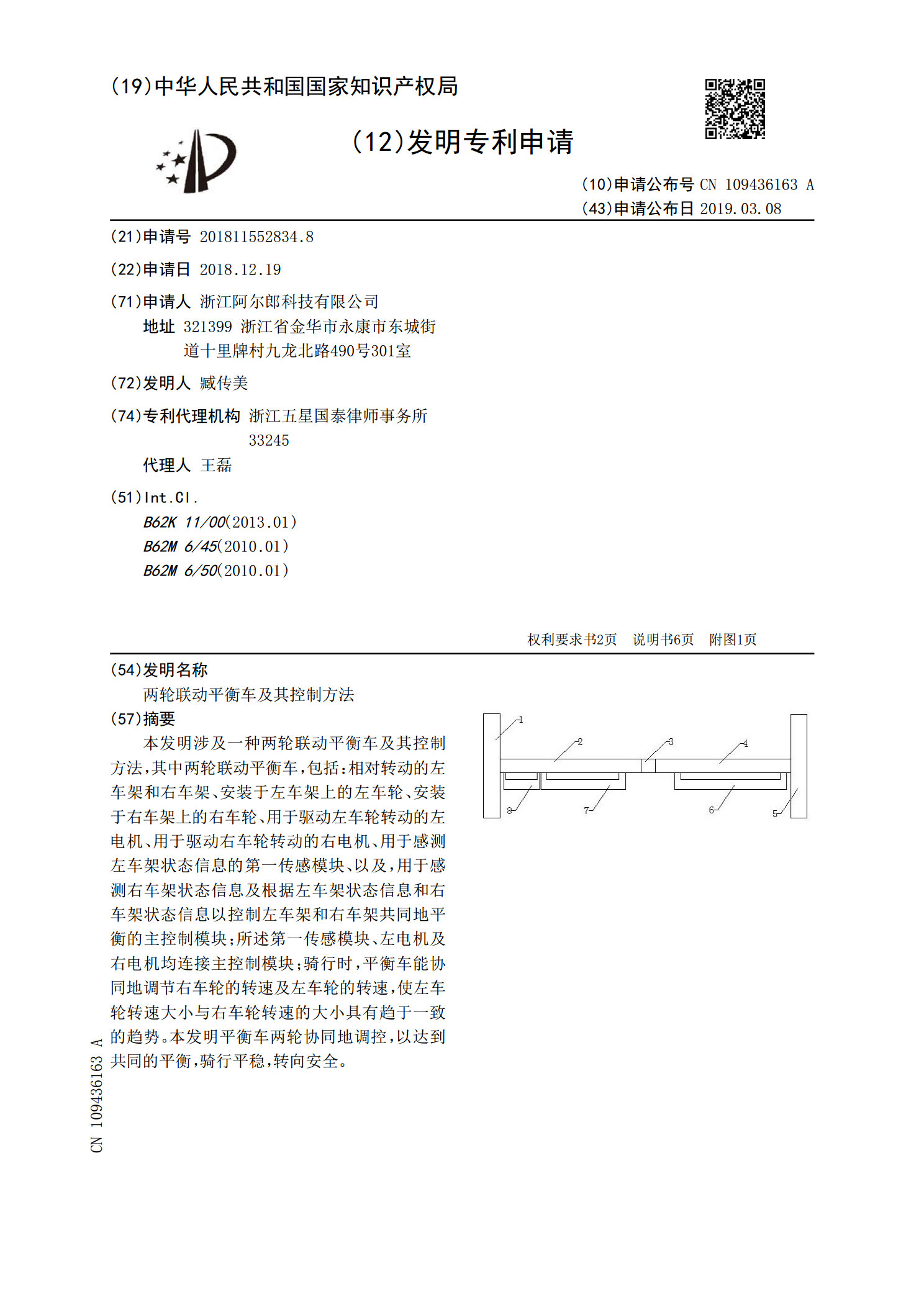
本发明涉及一种两轮联动平衡车及其控制方法,其中两轮联动平衡车,包括:相对转动的左车架和右车架、安装于左车架上的左车轮、安装于右车架上的右车轮、用于驱动左车轮转动的左电机、用于驱动右车轮转动的右电机、用于感测左车架状态信息的第一传感模块、以及,用于感测右车架状态信息及根据左车架状态信息和右车架状态信息以控制左车架和右车架共同地平衡的主控制模块;所述第一传感模块、左电机及右电机均连接主控制模块;骑行时,平衡车能协同地调节右车轮的转速及左车轮的转速,使左车轮转速大小与右车轮转速的大小具有趋于一致的趋势。本发明平
两轮电动平衡车及其控制方法.pdf
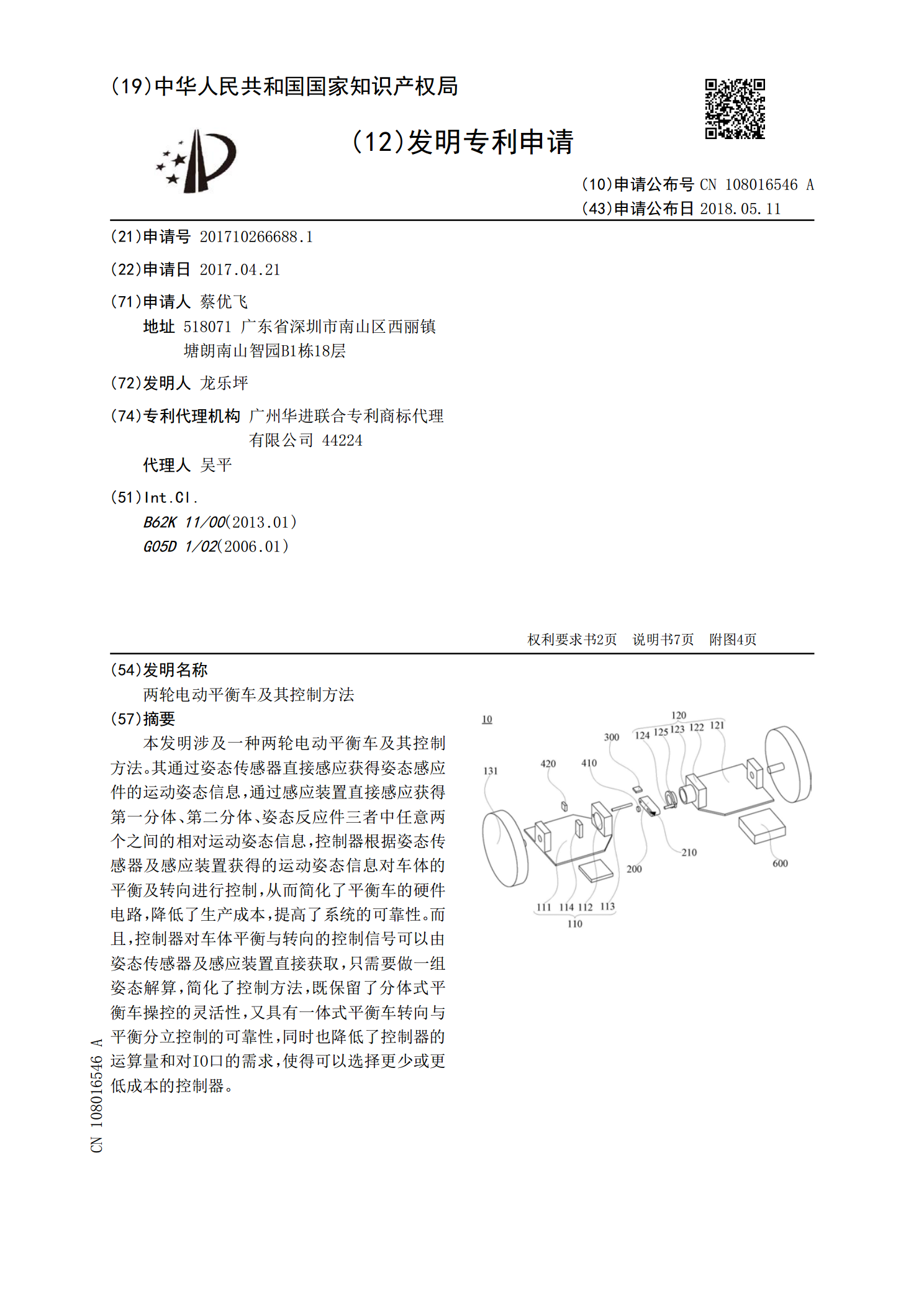
本发明涉及一种两轮电动平衡车及其控制方法。其通过姿态传感器直接感应获得姿态感应件的运动姿态信息,通过感应装置直接感应获得第一分体、第二分体、姿态反应件三者中任意两个之间的相对运动姿态信息,控制器根据姿态传感器及感应装置获得的运动姿态信息对车体的平衡及转向进行控制,从而简化了平衡车的硬件电路,降低了生产成本,提高了系统的可靠性。而且,控制器对车体平衡与转向的控制信号可以由姿态传感器及感应装置直接获取,只需要做一组姿态解算,简化了控制方法,既保留了分体式平衡车操控的灵活性,又具有一体式平衡车转向与平衡分立控制

两轮平衡车的控制方法.pdf
本发明提供一种两轮平衡车的控制方法,包括步骤:S1:控制器、定时器和传感器进入初始化;S2:传感器将采集的信号发送至控制器;S3:控制器处理采集的信号,得到车体当前的俯仰角度???????????????????????????????????????????????

一种两轮智能平衡车及其控制方法.pdf
本发明涉及一种两轮智能平衡车及其控制方法,包括主程序和定时中断程序,在主程序开始之后,执行定时中断程序,进入定时中断程序时,主程序暂停,定时中断程序结束后返回主程序暂停的位置;定时中断程序包括以下步骤:获取与平衡车两个车轮分别相连的两个电机的定子电压和绕组电流,分别计算获得电机转矩,通过电机转矩、磁链调节器以及矢量表生成两个电机所需要12路的PWM,进行直接转矩控制,输出到电机,完成平衡车的控制。本发明中采用直接转矩控制,输入量只需要定子电压和绕组电流,无需位置传感器,节约了成本并且稳定了性能;输出量是一

一种两轮平衡车及其转向控制方法.pdf
本发明涉及一种两轮平衡车,包括:平衡车主体,内置主控系统,其上端设有左踏板和右踏板,踏板设置有感知载人和空载状态的装置;无线摇杆,设置有转向摇杆和开关按键,无线摇杆与平衡车主体连接;无线接收装置,设置于所述平衡车主体,用于收到无线摇杆发出的转向信号后控制所述两轮平衡车转向。本发明还提供一种两轮平衡车的转向控制方法。本发明的优点体现在:利用无线摇杆替代了传统的扶杆转向系统,即减轻了平衡车的重量,减少了车体尺寸,在行驶中遇到紧急或危险情况时,也可方便的实现人车分离,安全性更高;另外,在遇到不适合驾驶的地带,用