
一种用于船舶喷砂除锈的新型磁吸附式爬壁机器人.pdf

羽沫****魔王

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于船舶喷砂除锈的新型磁吸附式爬壁机器人.pdf
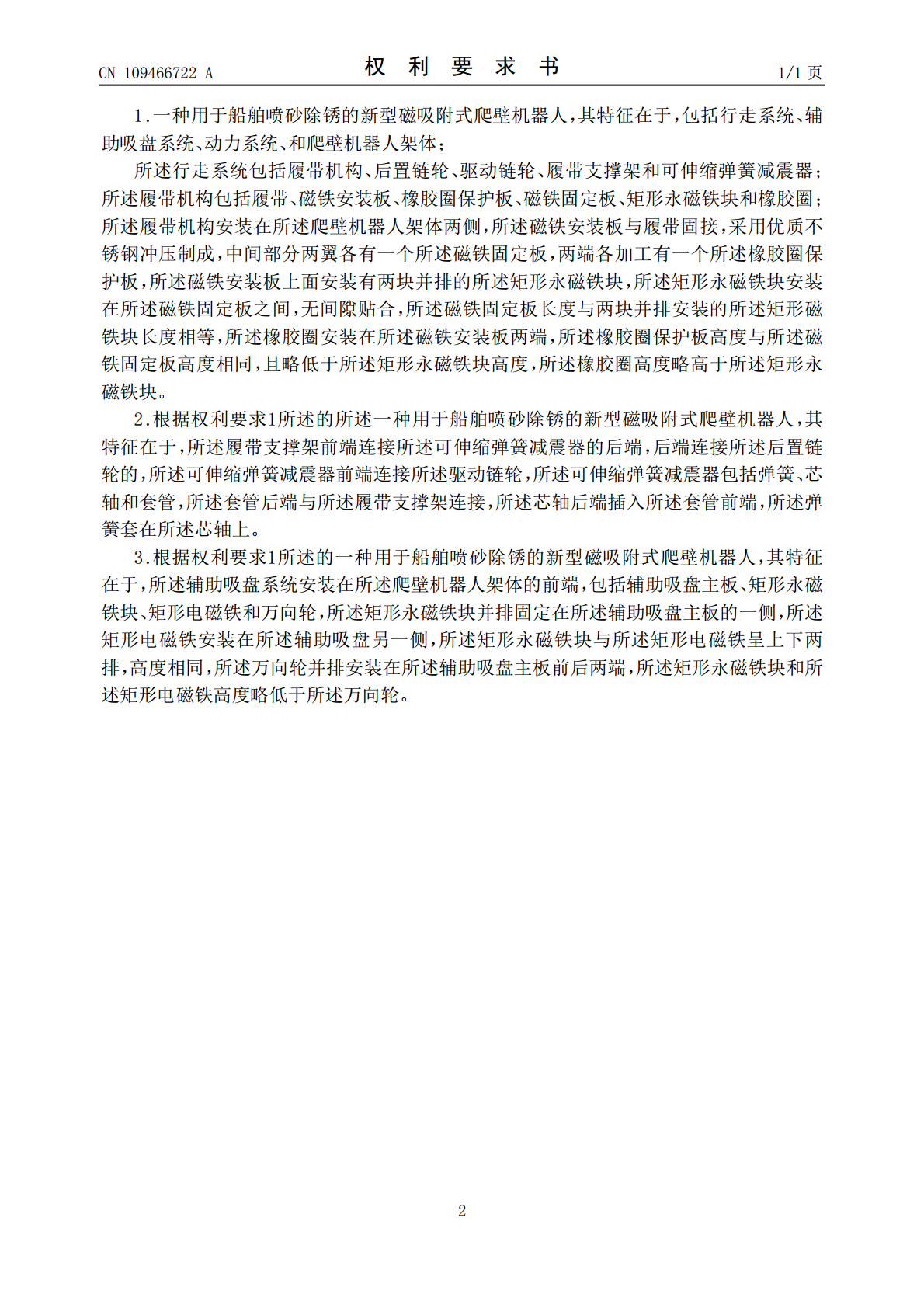
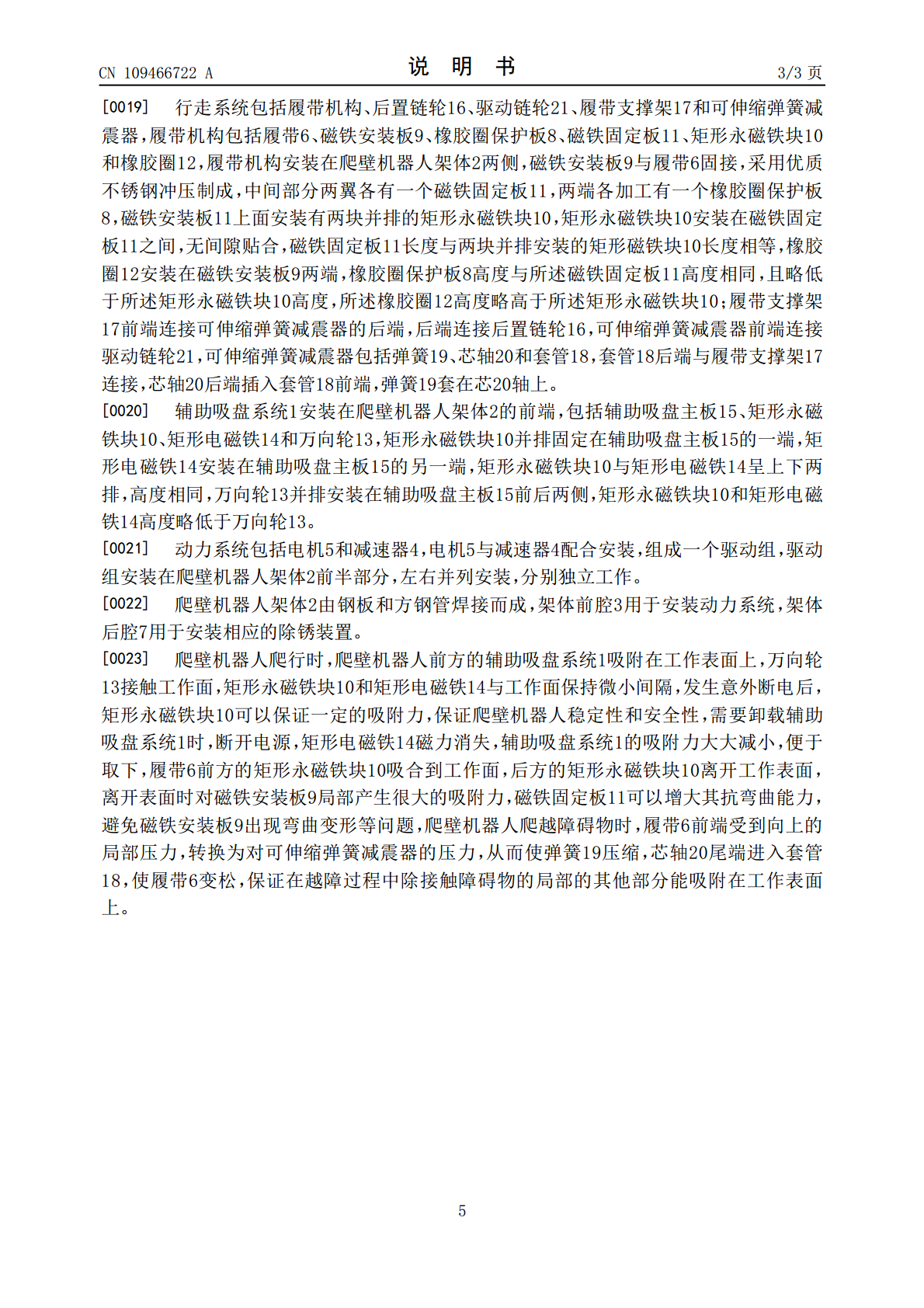
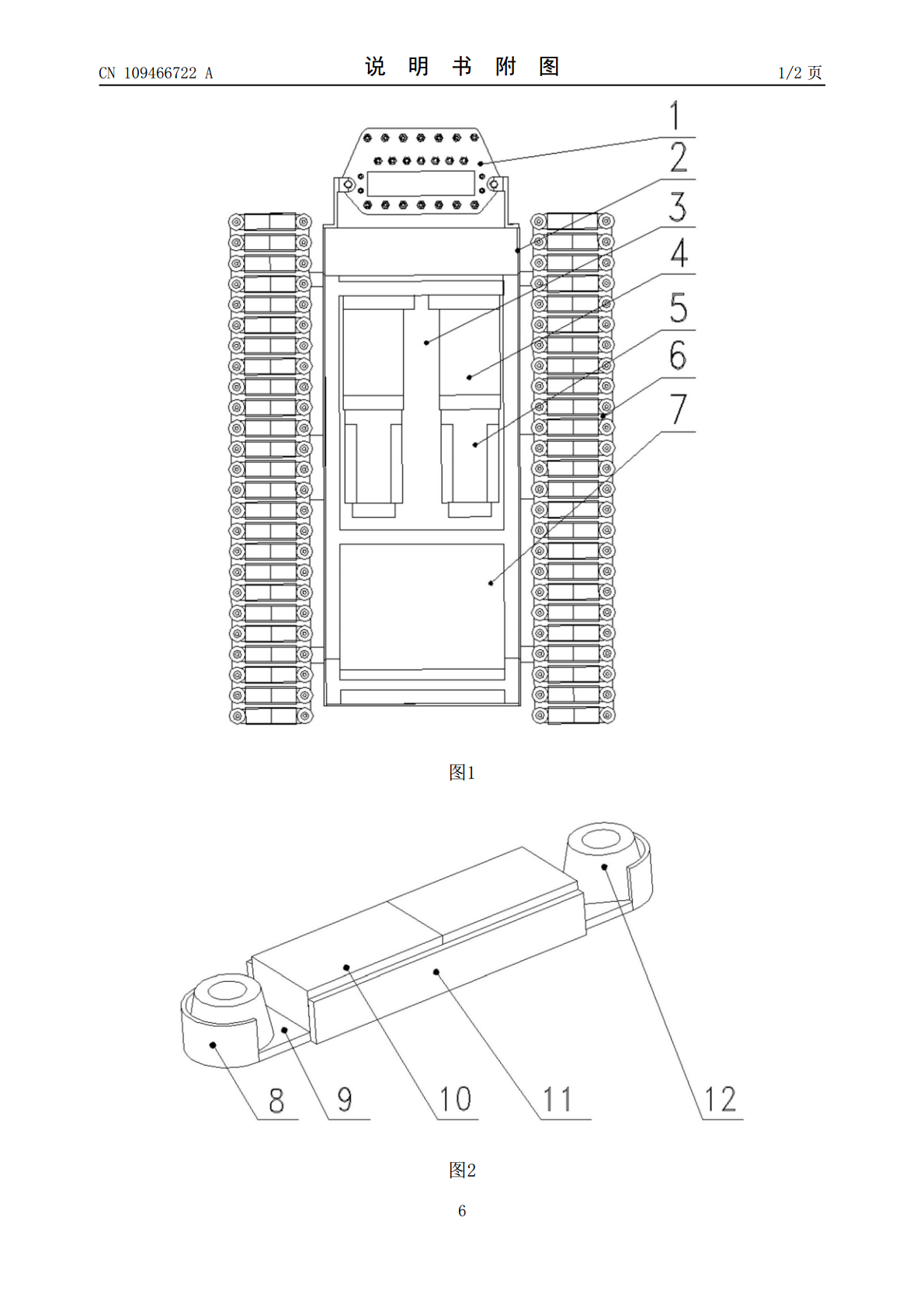
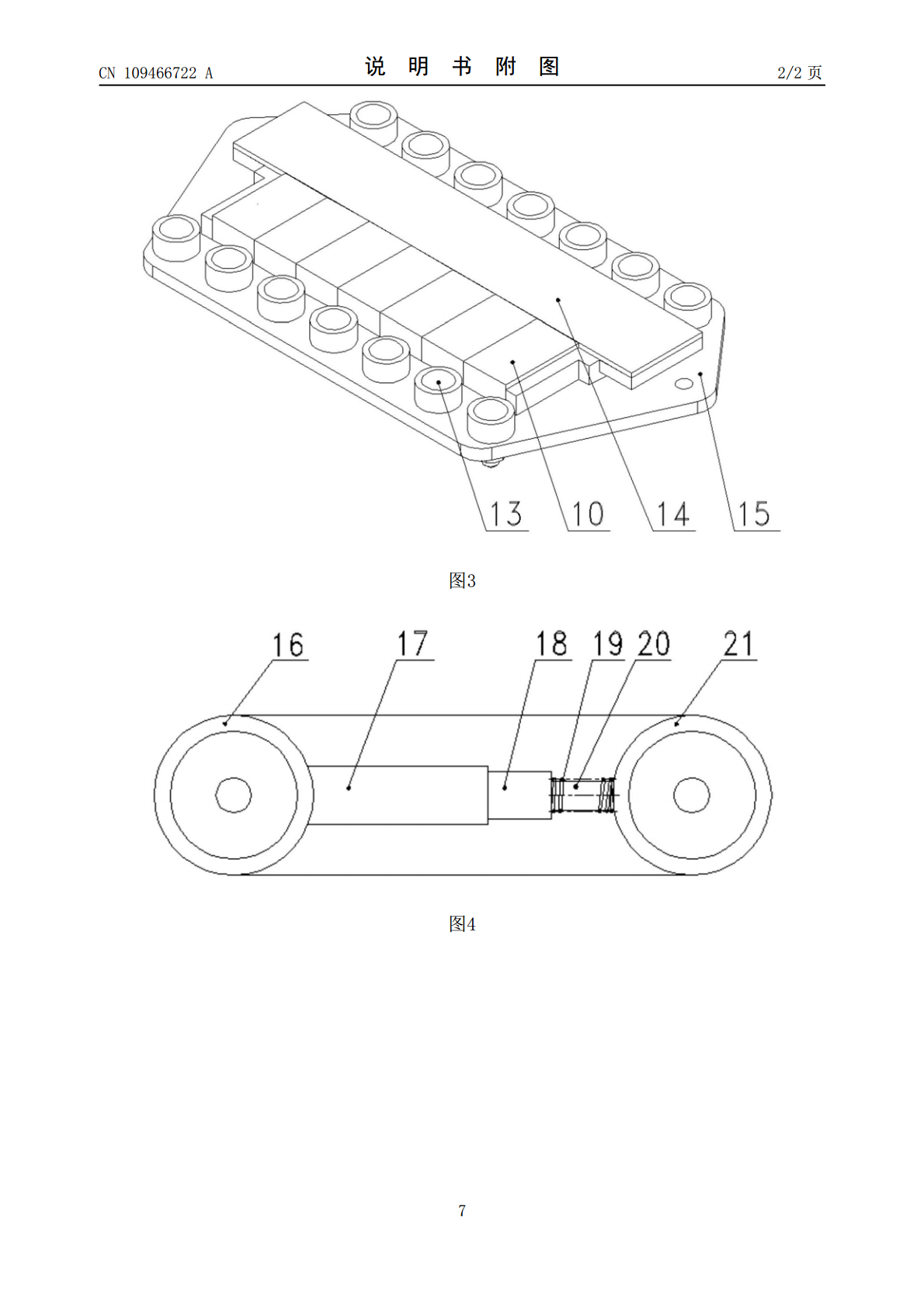
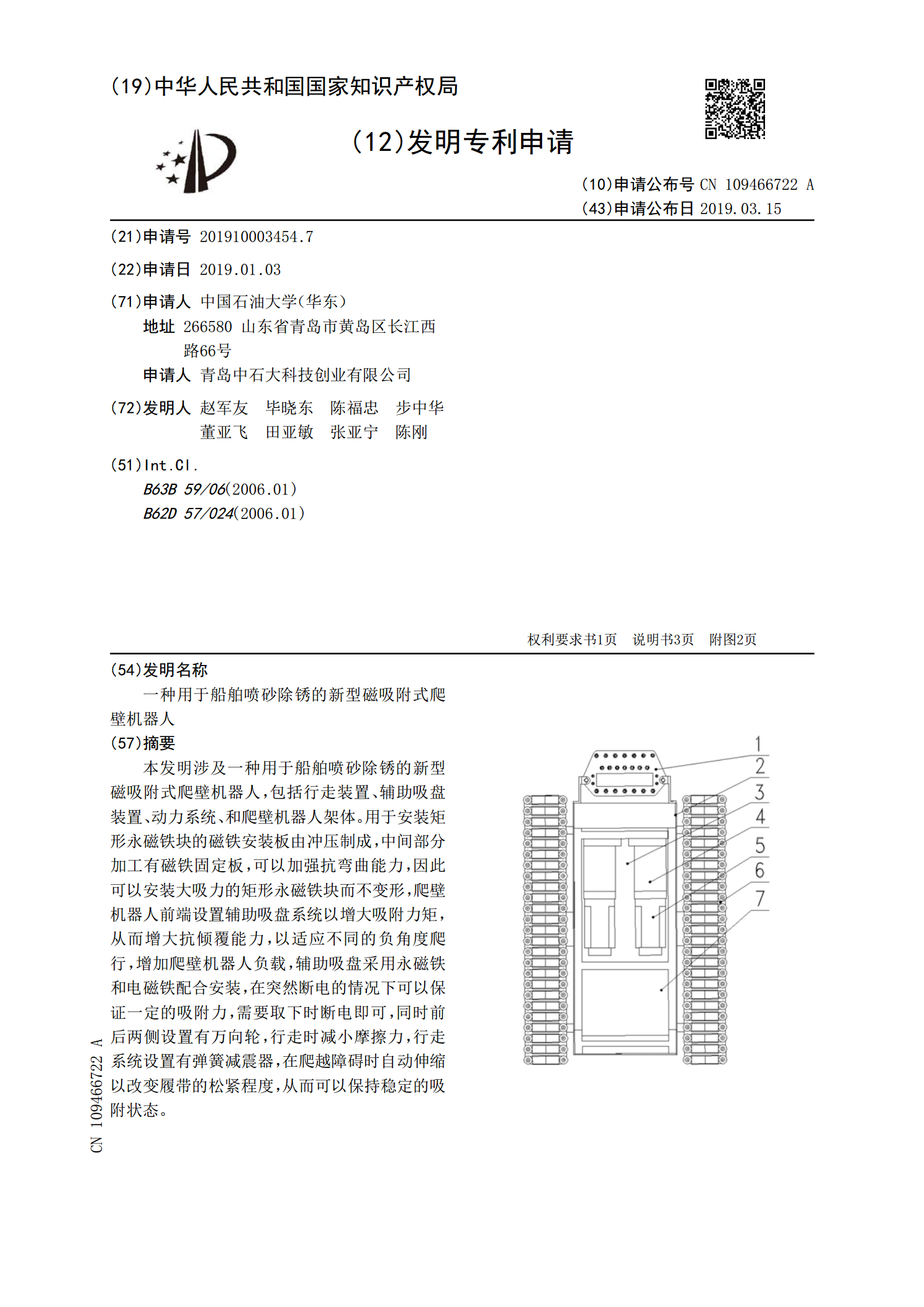
本发明涉及一种用于船舶喷砂除锈的新型磁吸附式爬壁机器人,包括行走装置、辅助吸盘装置、动力系统、和爬壁机器人架体。用于安装矩形永磁铁块的磁铁安装板由冲压制成,中间部分加工有磁铁固定板,可以加强抗弯曲能力,因此可以安装大吸力的矩形永磁铁块而不变形,爬壁机器人前端设置辅助吸盘系统以增大吸附力矩,从而增大抗倾覆能力,以适应不同的负角度爬行,增加爬壁机器人负载,辅助吸盘采用永磁铁和电磁铁配合安装,在突然断电的情况下可以保证一定的吸附力,需要取下时断电即可,同时前后两侧设置有万向轮,行走时减小摩擦力,行走系统设置有弹

一种爬壁式船舶喷砂除锈设备的控制系统.pdf
本发明涉及一种爬壁式船舶喷砂除锈设备的控制系统,包括信息采集模块、地面遥控器、驱动装置控制模块、喷砂及回收控制模块、辅助吊装卷扬机控制模块、急停控制模块。所述信息采集模块用于采集外部输入信息,包括两个微型摄像机,分别安装在爬壁机器人前后两端,所述地面遥控器置于地面,通过无线信号分别连接各个模块,所述驱动装置控制模块包括第一无线接收器、PLC、左驱动装置、右驱动装置、钢丝刷驱动装置。本发明操作简单,可以统筹控制各部分之间的协调配合,整套设备安全可靠,大大提高工作效率,爬壁机器人上设置有微型摄像机,在视线盲区
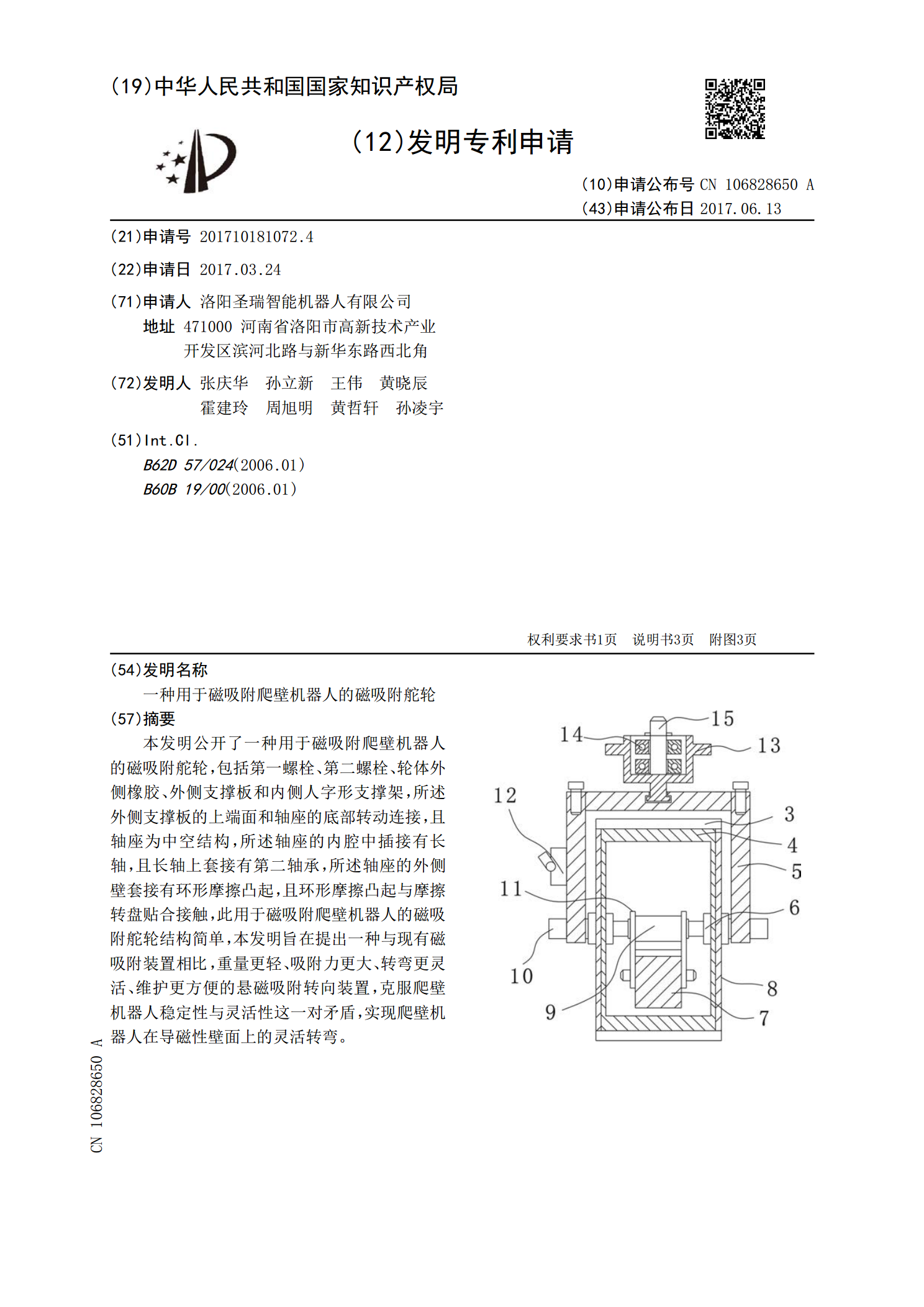
一种用于磁吸附爬壁机器人的磁吸附舵轮.pdf
本发明公开了一种用于磁吸附爬壁机器人的磁吸附舵轮,包括第一螺栓、第二螺栓、轮体外侧橡胶、外侧支撑板和内侧人字形支撑架,所述外侧支撑板的上端面和轴座的底部转动连接,且轴座为中空结构,所述轴座的内腔中插接有长轴,且长轴上套接有第二轴承,所述轴座的外侧壁套接有环形摩擦凸起,且环形摩擦凸起与摩擦转盘贴合接触,此用于磁吸附爬壁机器人的磁吸附舵轮结构简单,本发明旨在提出一种与现有磁吸附装置相比,重量更轻、吸附力更大、转弯更灵活、维护更方便的悬磁吸附转向装置,克服爬壁机器人稳定性与灵活性这一对矛盾,实现爬壁机器人在导磁
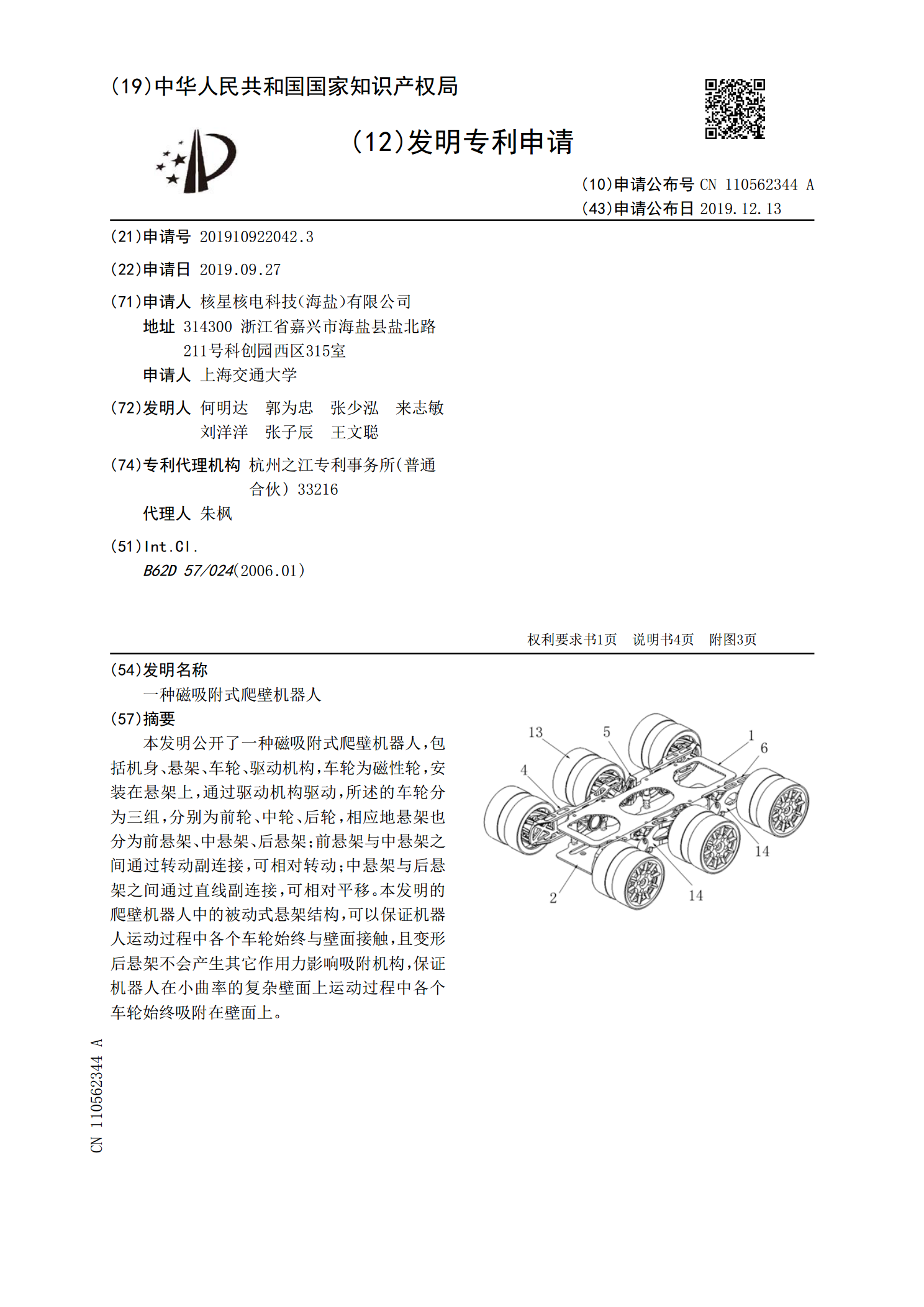
一种磁吸附式爬壁机器人.pdf
本发明公开了一种磁吸附式爬壁机器人,包括机身、悬架、车轮、驱动机构,车轮为磁性轮,安装在悬架上,通过驱动机构驱动,所述的车轮分为三组,分别为前轮、中轮、后轮,相应地悬架也分为前悬架、中悬架、后悬架;前悬架与中悬架之间通过转动副连接,可相对转动;中悬架与后悬架之间通过直线副连接,可相对平移。本发明的爬壁机器人中的被动式悬架结构,可以保证机器人运动过程中各个车轮始终与壁面接触,且变形后悬架不会产生其它作用力影响吸附机构,保证机器人在小曲率的复杂壁面上运动过程中各个车轮始终吸附在壁面上。

一种用于爬壁机器人的磁吸附轮.pdf
一种用于爬壁机器人的磁吸附轮,在转轴外固定有阵列磁环,阵列磁环包括若干组磁阵列单元,每组磁阵列单元依次包括N极向心到S极的径向磁块、N极到S极的顺时针环向磁块、N极外向心到S极的径向磁块,N板到S极的逆时针环向磁块。磁吸附轮通过内部的永磁单元Halbach阵列原理进行排列,而通过本发明这种排列,可以最大化地增强磁吸附力。