
一种用于爬壁机器人的磁吸附轮.pdf

建英****66


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于永磁吸附爬壁机器人的磁轮.pdf
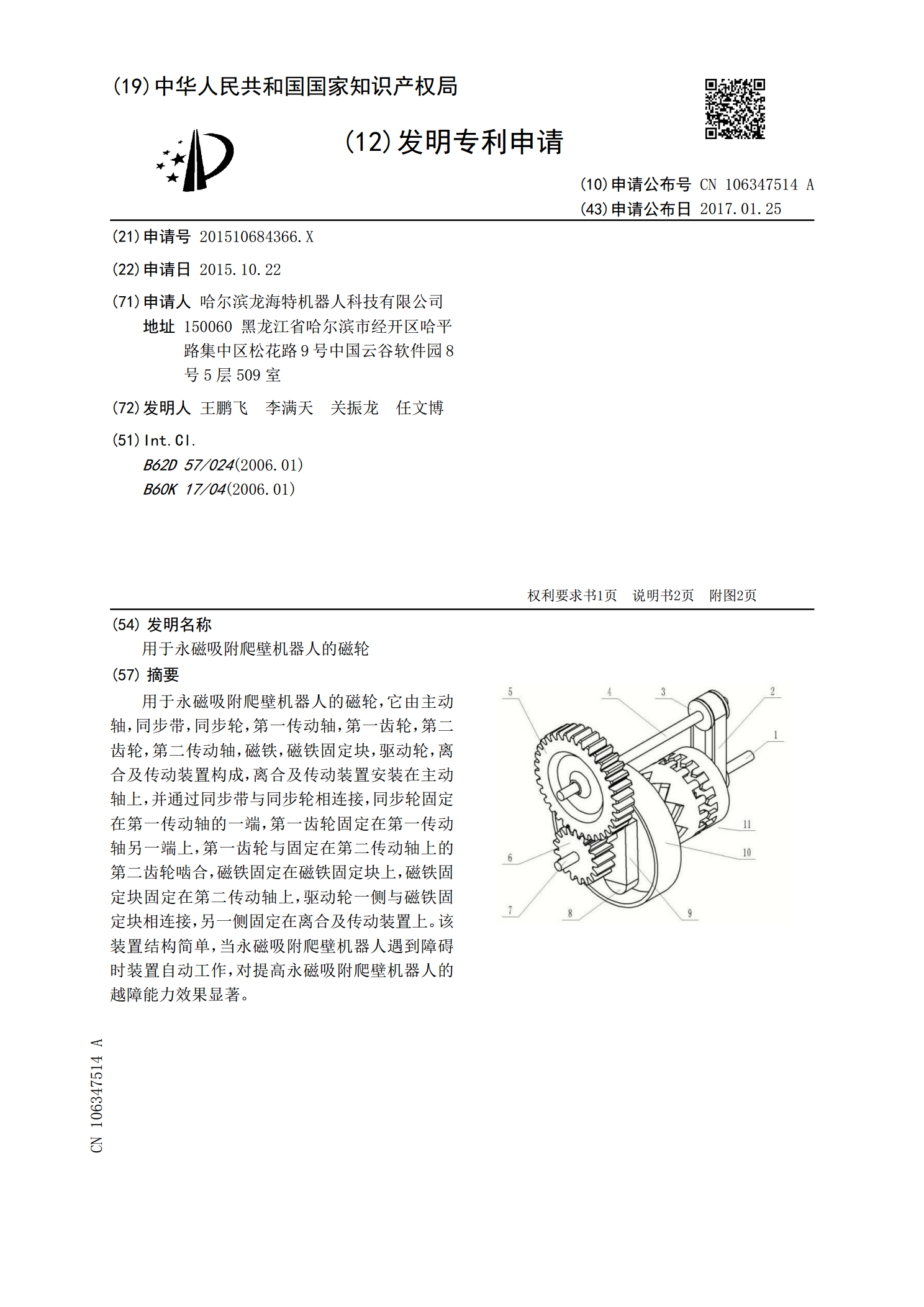
用于永磁吸附爬壁机器人的磁轮,它由主动轴,同步带,同步轮,第一传动轴,第一齿轮,第二齿轮,第二传动轴,磁铁,磁铁固定块,驱动轮,离合及传动装置构成,离合及传动装置安装在主动轴上,并通过同步带与同步轮相连接,同步轮固定在第一传动轴的一端,第一齿轮固定在第一传动轴另一端上,第一齿轮与固定在第二传动轴上的第二齿轮啮合,磁铁固定在磁铁固定块上,磁铁固定块固定在第二传动轴上,驱动轮一侧与磁铁固定块相连接,另一侧固定在离合及传动装置上。该装置结构简单,当永磁吸附爬壁机器人遇到障碍时装置自动工作,对提高永磁吸附爬壁机器

一种用于爬壁机器人的磁吸附轮.pdf
一种用于爬壁机器人的磁吸附轮,在转轴外固定有阵列磁环,阵列磁环包括若干组磁阵列单元,每组磁阵列单元依次包括N极向心到S极的径向磁块、N极到S极的顺时针环向磁块、N极外向心到S极的径向磁块,N板到S极的逆时针环向磁块。磁吸附轮通过内部的永磁单元Halbach阵列原理进行排列,而通过本发明这种排列,可以最大化地增强磁吸附力。
一种用于磁吸附爬壁机器人的磁吸附舵轮.pdf
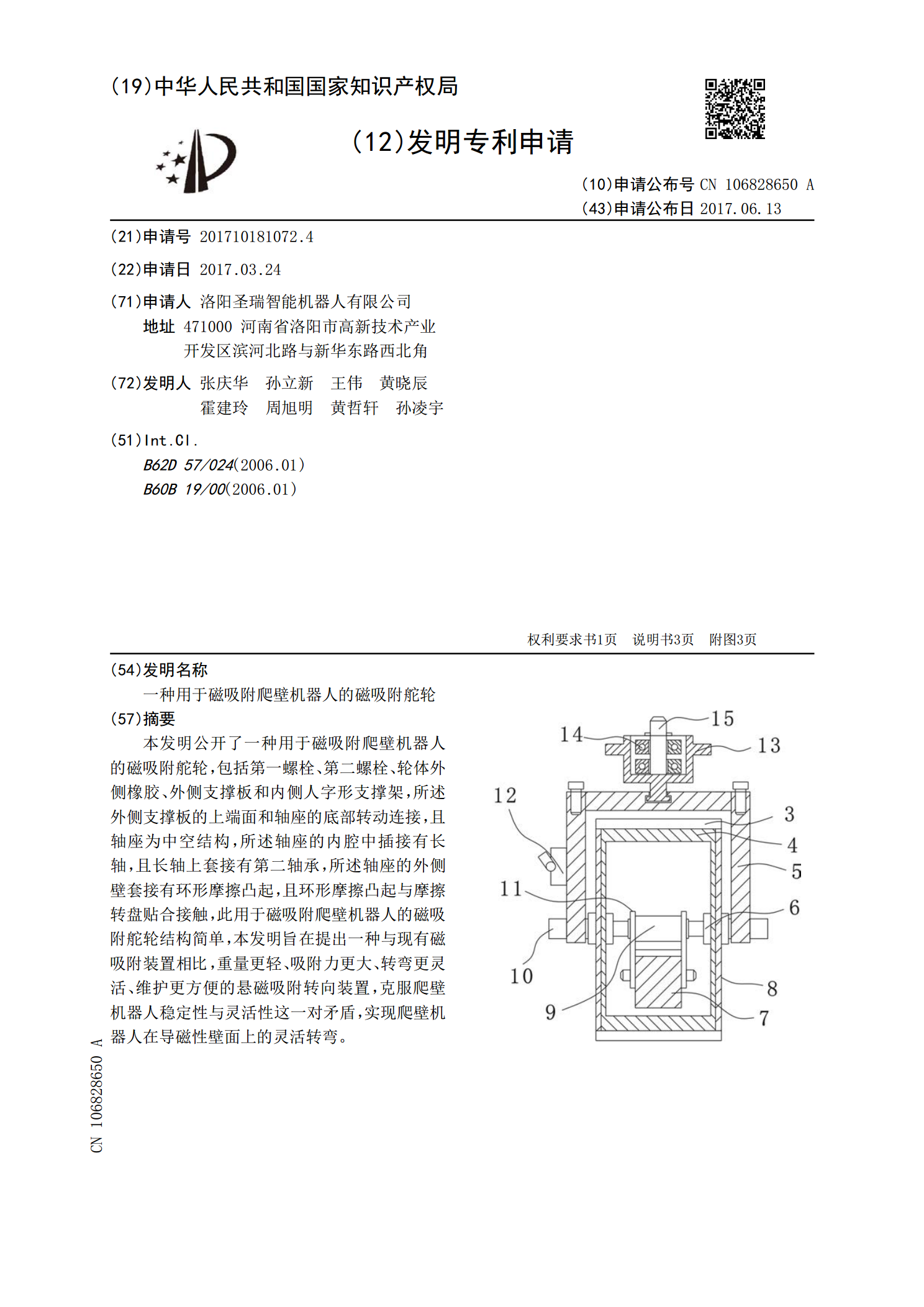
本发明公开了一种用于磁吸附爬壁机器人的磁吸附舵轮,包括第一螺栓、第二螺栓、轮体外侧橡胶、外侧支撑板和内侧人字形支撑架,所述外侧支撑板的上端面和轴座的底部转动连接,且轴座为中空结构,所述轴座的内腔中插接有长轴,且长轴上套接有第二轴承,所述轴座的外侧壁套接有环形摩擦凸起,且环形摩擦凸起与摩擦转盘贴合接触,此用于磁吸附爬壁机器人的磁吸附舵轮结构简单,本发明旨在提出一种与现有磁吸附装置相比,重量更轻、吸附力更大、转弯更灵活、维护更方便的悬磁吸附转向装置,克服爬壁机器人稳定性与灵活性这一对矛盾,实现爬壁机器人在导磁
用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人.pdf
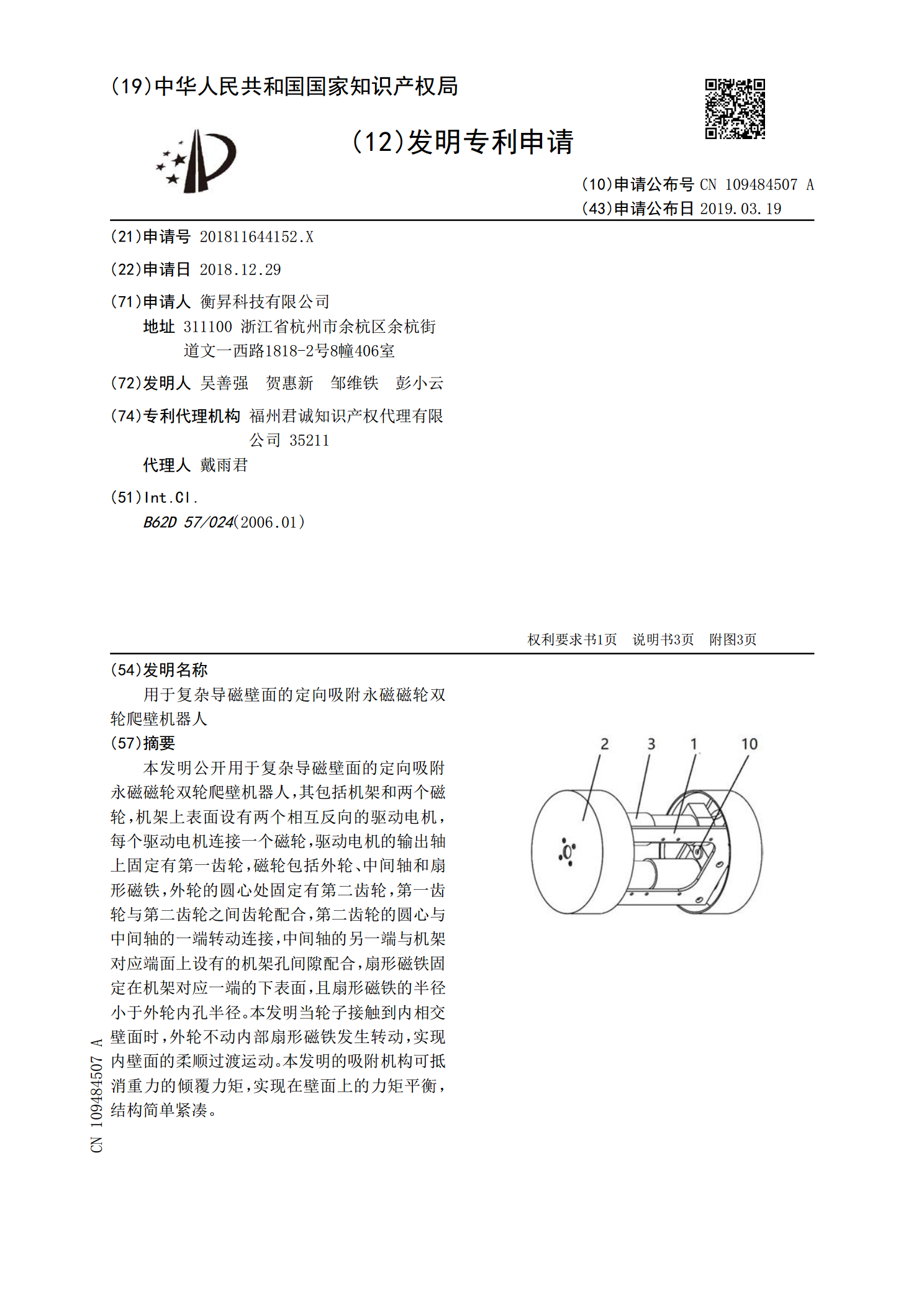
本发明公开用于复杂导磁壁面的定向吸附永磁磁轮双轮爬壁机器人,其包括机架和两个磁轮,机架上表面设有两个相互反向的驱动电机,每个驱动电机连接一个磁轮,驱动电机的输出轴上固定有第一齿轮,磁轮包括外轮、中间轴和扇形磁铁,外轮的圆心处固定有第二齿轮,第一齿轮与第二齿轮之间齿轮配合,第二齿轮的圆心与中间轴的一端转动连接,中间轴的另一端与机架对应端面上设有的机架孔间隙配合,扇形磁铁固定在机架对应一端的下表面,且扇形磁铁的半径小于外轮内孔半径。本发明当轮子接触到内相交壁面时,外轮不动内部扇形磁铁发生转动,实现内壁面的柔顺

一种用于磁吸附爬壁机器人的新型万向滚动磁轮装置.pdf
本发明属于机器人技术领域,具体来说是用于磁吸附爬壁机器人的一种用于磁吸附爬壁机器人的新型万向滚动磁轮装置,包括环形永磁体,所述的环形永磁体两侧设置有全方位轮,所述全方位轮包括有依次设置的第一轮毂、辊子、套筒、辊子轴、第二轮毂;全方位轮的结构为:在轮毂的外缘设置有可绕自身轴线旋转的辊子,辊子均匀分布于轮毂周围,辊子轴线与轮毂轴线正交,两侧的全方位轮交错布置,使得一侧全方位轮的辊子的轴向投影位于另一侧全方位轮的两个辊子中间。本发明优点当车轮具有沿车轮轴向的运动趋势时两侧全方位轮与地面接触的辊子绕自身轴线转动,