
后轮转向系统及其控制方法.pdf

一吃****永贺

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
后轮转向系统及其控制方法.pdf
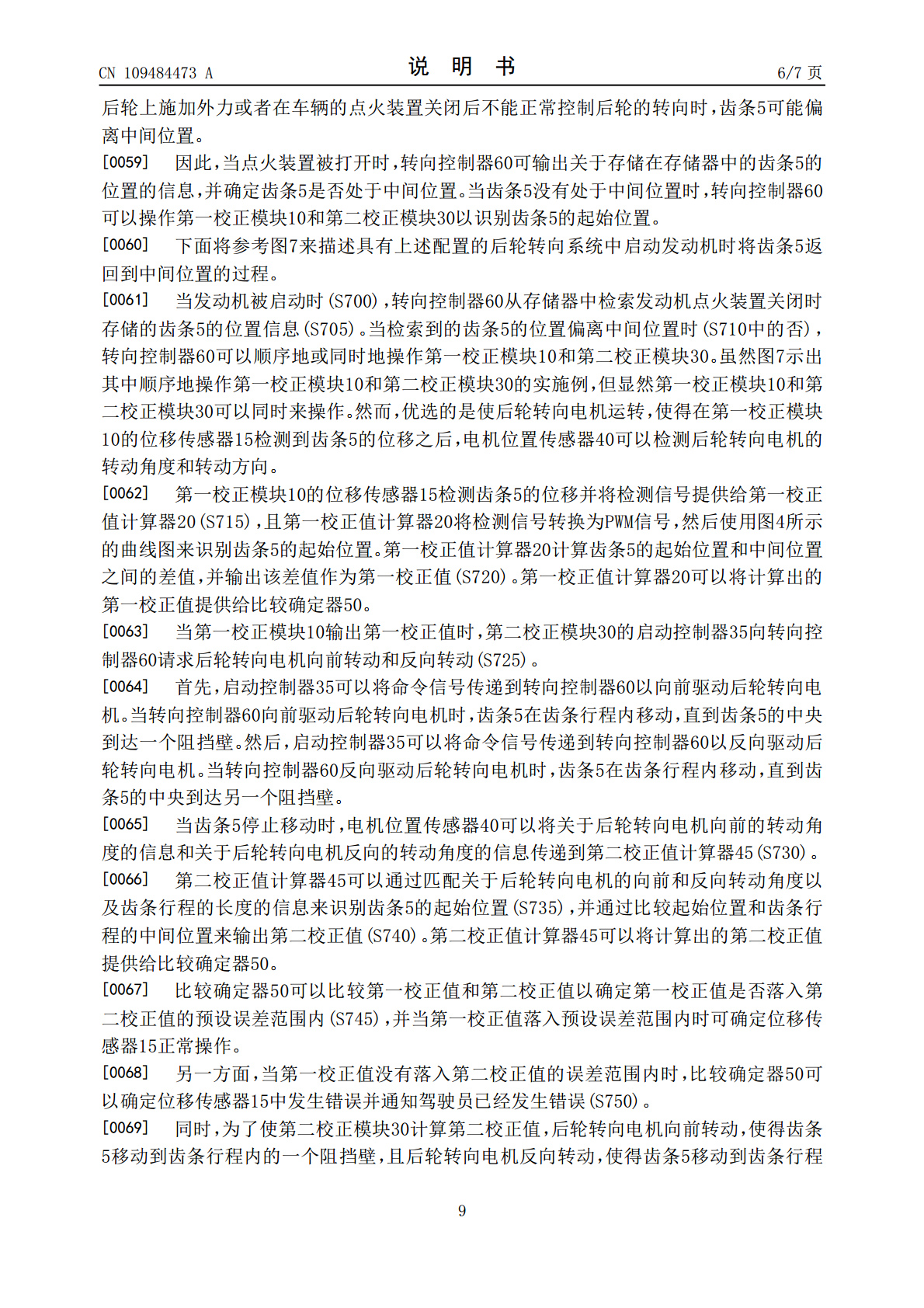
本公开涉及一种后轮转向系统及其控制方法。后轮转向系统包括:齿条,将后轮转向电机产生的驱动力传递到后轮;第一校正模块,在发动机被启动时,使用位移传感器检测齿条的位置,并计算第一校正值,该第一校正值是检测到的位置和中间位置之间的差值;第二校正模块,在发动机被启动时,使用检测后轮转向电机的转动角度的电机位置传感器来检测齿条的位置,并计算第二校正值,该第二校正值是检测到的位置和中间位置之间的差值;比较确定器,比较第一校正值和第二校正值以确定位移传感器是否发生故障;以及转向控制器,控制后轮转向电机的运转。因此,可以
后轮转向控制系统及其控制方法.pdf
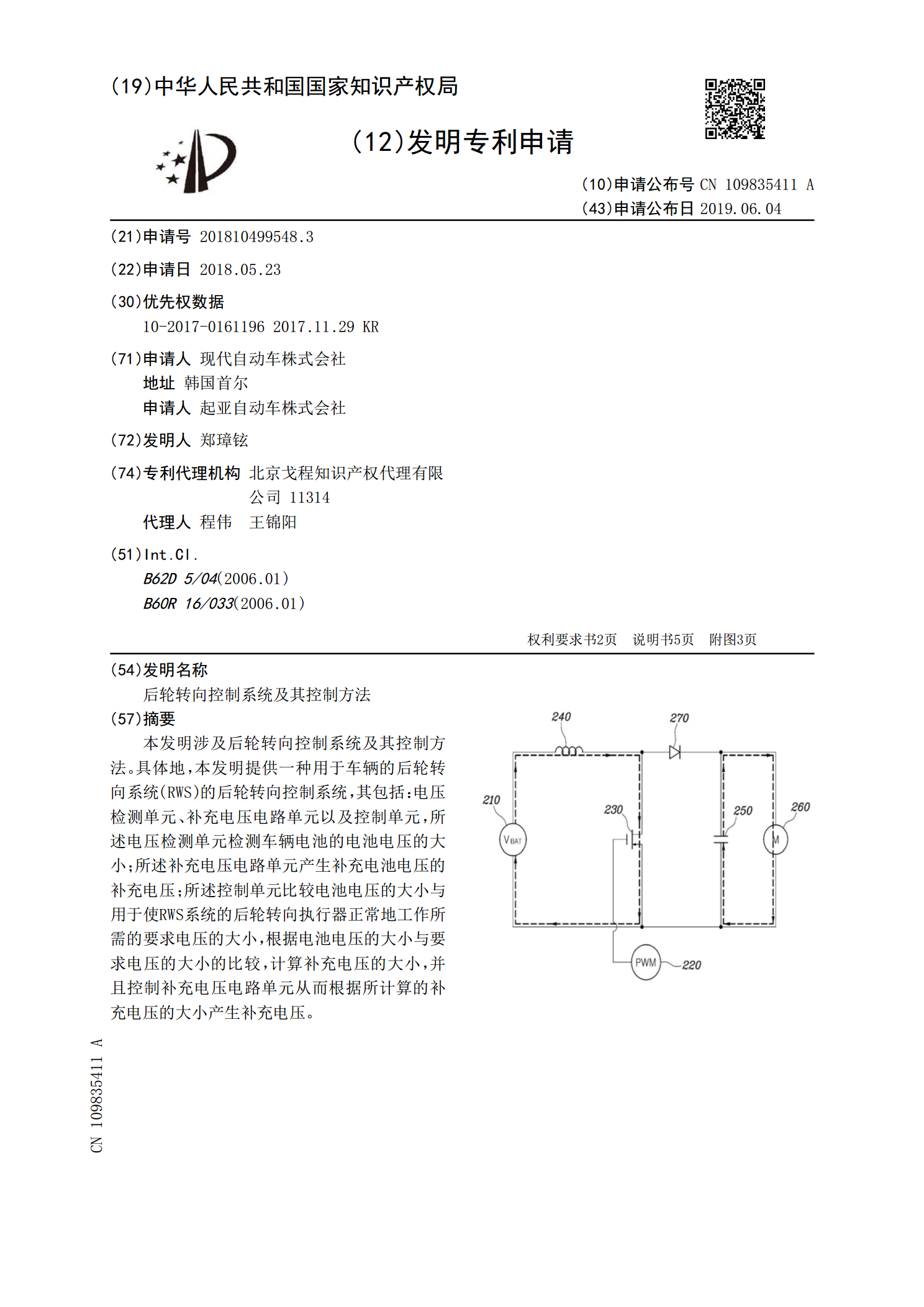
本发明涉及后轮转向控制系统及其控制方法。具体地,本发明提供一种用于车辆的后轮转向系统(RWS)的后轮转向控制系统,其包括:电压检测单元、补充电压电路单元以及控制单元,所述电压检测单元检测车辆电池的电池电压的大小;所述补充电压电路单元产生补充电池电压的补充电压;所述控制单元比较电池电压的大小与用于使RWS系统的后轮转向执行器正常地工作所需的要求电压的大小,根据电池电压的大小与要求电压的大小的比较,计算补充电压的大小,并且控制补充电压电路单元从而根据所计算的补充电压的大小产生补充电压。

车辆后轮辅助转向的控制系统及其控制方法.pdf
本发明涉及一种车辆后轮辅助转向的控制系统及其控制方法。解决了汽车过弯不安全的问题,技术方案为:包括控制器、数据执行模块、数据采集模块、后轮主动转向装置、车轮偏角测量仪和转速测量仪,车轮偏角测量仪安装在前轮处用于测试前轮的转向角度,转速测量仪也安装在前轮处用于测试前轮的速度,车轮偏角测量仪和转速测量仪的输出端与数据采集模块电连接,数据采集模块与控制器电连接,控制器与数据执行模块的控制端电连接,后轮主动转向装置安装在汽车后轮处,后轮主动转向装置的控制端与数据执行模块的输出端电连接,控制器与汽车的ECU电连接,
汽车后轮转向电控液压系统及其控制方法.pdf
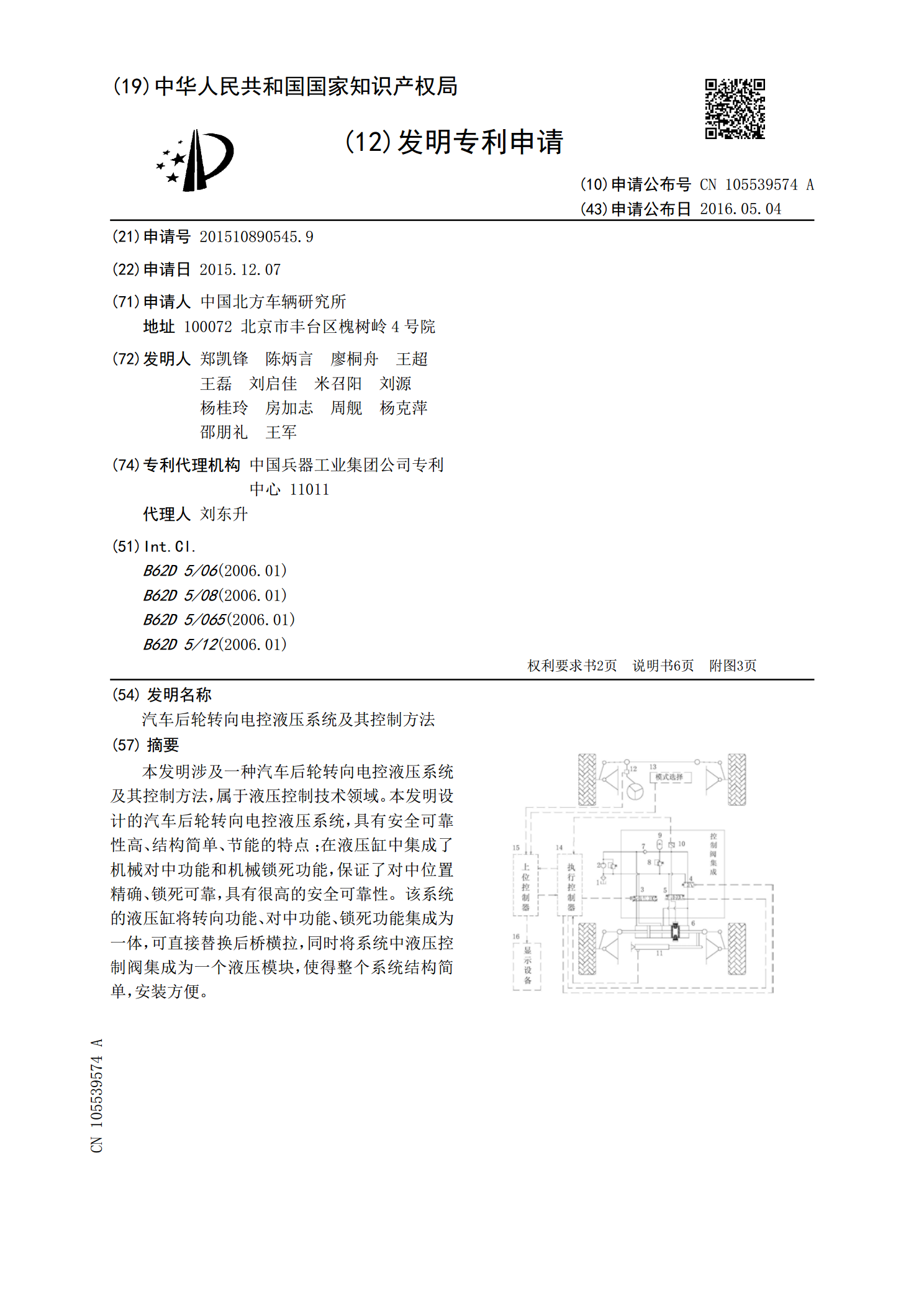
本发明涉及一种汽车后轮转向电控液压系统及其控制方法,属于液压控制技术领域。本发明设计的汽车后轮转向电控液压系统,具有安全可靠性高、结构简单、节能的特点;在液压缸中集成了机械对中功能和机械锁死功能,保证了对中位置精确、锁死可靠,具有很高的安全可靠性。该系统的液压缸将转向功能、对中功能、锁死功能集成为一体,可直接替换后桥横拉,同时将系统中液压控制阀集成为一个液压模块,使得整个系统结构简单,安装方便。

后轮转向装置及其控制方法.pdf
本发明提供一种后轮转向装置及其控制方法。本发明的后轮转向装置,其特征在于,包括:车速检测部,其在行驶时检测车速;转向角检测部,其检测对应于方向盘动作的转向角;小齿轮角检测部,其检测对应于方向盘动作的小齿轮角;后轮驱动部,其使后轮转向;以及,控制部,其分别从车速检测部、转向角检测部及小齿轮角检测部接收车速、转向角及小齿轮角并算出用于转向后轮的目标后轮转向角,根据转向角速度、车速及小齿轮角算出后轮的转向时点经过调整的最终后轮转向角并启动后轮驱动部。本发明的后轮转向装置能够在保持车辆稳定性的同时提高转向感,从而