
柔性机械臂变刚度关节的设计与仿真研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔性机械臂变刚度关节的设计与仿真研究.docx
柔性机械臂变刚度关节的设计与仿真研究柔性机械臂变刚度关节的设计与仿真研究摘要:柔性机械臂由于其灵活性和适应性,已经成为机器人领域的研究热点。然而,传统的刚性关节限制了机械臂的灵活性和适应性。因此,研究柔性机械臂变刚度关节的设计与仿真具有重要意义。本文介绍了柔性机械臂的工作原理和现有的关节设计方法,然后提出了一种基于力感知技术的柔性机械臂变刚度关节设计方法,并进行了仿真验证。结果表明,该设计方法有效地提高了柔性机械臂的适应性和控制精度。关键词:柔性机械臂、变刚度关节、设计、仿真1.引言柔性机械臂是一种具有灵

柔性关节机械臂刚度的研究.docx
柔性关节机械臂刚度的研究随着机器人技术的不断发展,机器人在各个领域都有着广泛应用,机器人的关节结构是机器人中最重要的部分之一。关节的刚度是机器人能够完成复杂任务的关键因素之一。本次论文将主要对柔性关节机械臂刚度进行研究。一、柔性关节机械臂柔性关节机械臂是一种新型的机械臂,它与传统刚性机械臂相比,主要区别在于其具有柔性关节,这种设计可以有效地减小机械臂在工作时的惯性力和摩擦力,从而提高机械臂的运动速度和精度。柔性关节机械臂通常是由弯曲传感器和柔性电缆等组成,这些组件可以大大增强机器人的稳定性和精度。二、柔性

机械臂柔性关节SEA设计与仿真分析.pptx
汇报人:/目录0102SEA设计原理柔性关节结构设计材料选择与优化制造工艺与实现03有限元分析动力学建模与仿真优化设计与分析性能评估与改进04测试方案与流程测试结果与数据分析与传统关节的比较性能优势与局限性05在机器人领域的应用在航空航天领域的应用在医疗器械领域的应用在其他领域的应用前景汇报人:
一种新型通用变刚度机械臂关节.pdf
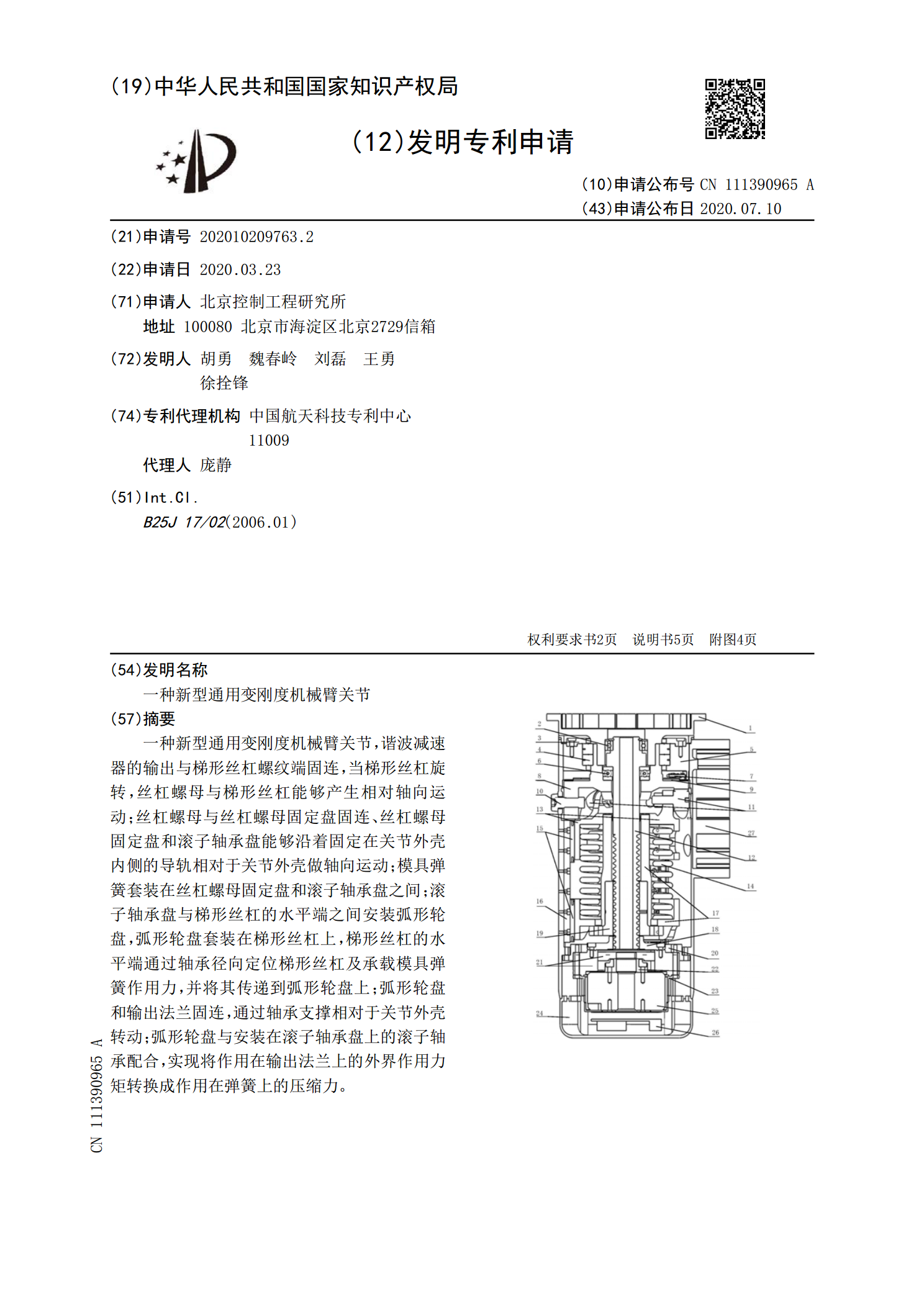
一种新型通用变刚度机械臂关节,谐波减速器的输出与梯形丝杠螺纹端固连,当梯形丝杠旋转,丝杠螺母与梯形丝杠能够产生相对轴向运动;丝杠螺母与丝杠螺母固定盘固连、丝杠螺母固定盘和滚子轴承盘能够沿着固定在关节外壳内侧的导轨相对于关节外壳做轴向运动;模具弹簧套装在丝杠螺母固定盘和滚子轴承盘之间;滚子轴承盘与梯形丝杠的水平端之间安装弧形轮盘,弧形轮盘套装在梯形丝杠上,梯形丝杠的水平端通过轴承径向定位梯形丝杠及承载模具弹簧作用力,并将其传递到弧形轮盘上;弧形轮盘和输出法兰固连,通过轴承支撑相对于关节外壳转动;弧形轮盘与安

柔性关节机械臂振动抑制研究.docx
柔性关节机械臂振动抑制研究柔性关节机械臂振动抑制研究摘要:柔性关节机械臂具有较高的自由度和灵活性,但在操作过程中常伴随着振动问题,影响着其精准性和稳定性。本文针对柔性关节机械臂振动抑制问题,从振动机理、振动分析和振动控制等方面进行综述和研究,并提出相应的解决方案。通过分析机械臂振动的来源,可以明确振动问题是由柔性关节系统的固有振动、外界扰动以及非线性特性引起的。在振动分析方面,采用模态分析和有限元分析等方法,识别关键振动模态,并确定振动频率和幅值的特性。在振动控制方面,通过选择合适的控制策略、设计合理的控