
一种可控变刚度柔性肘关节康复机器人.pdf

鸿朗****ka

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可控变刚度柔性肘关节康复机器人.pdf
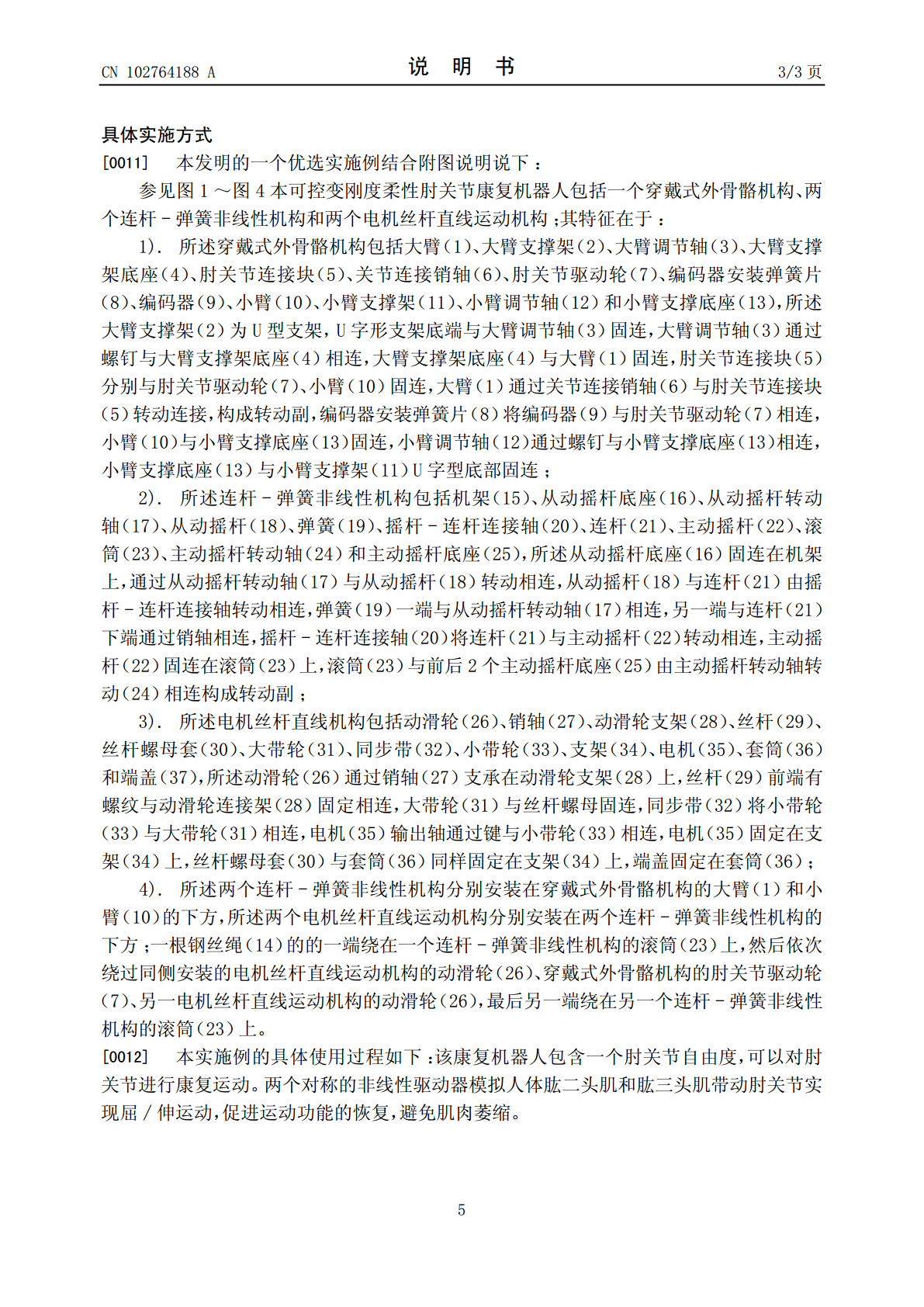
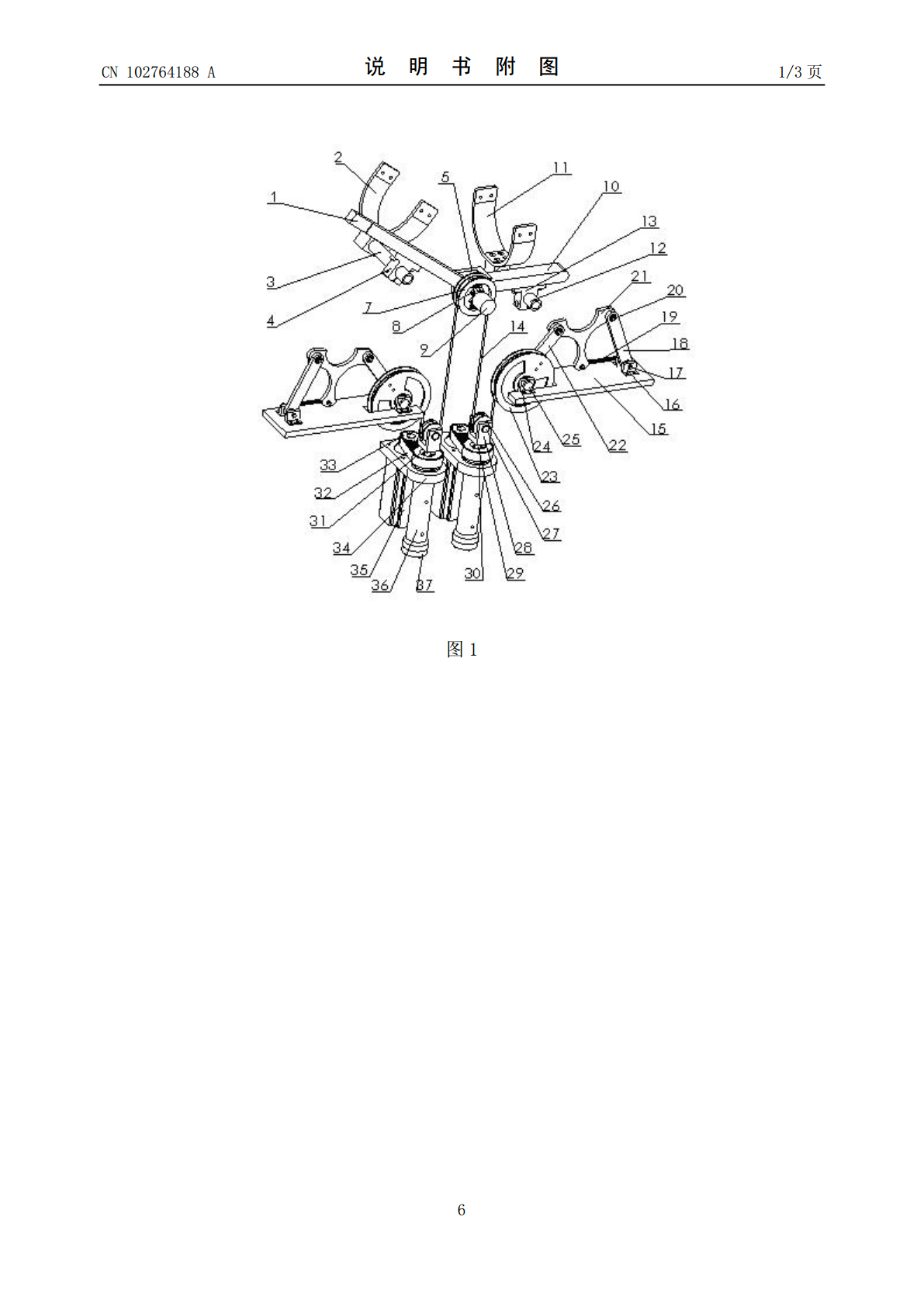
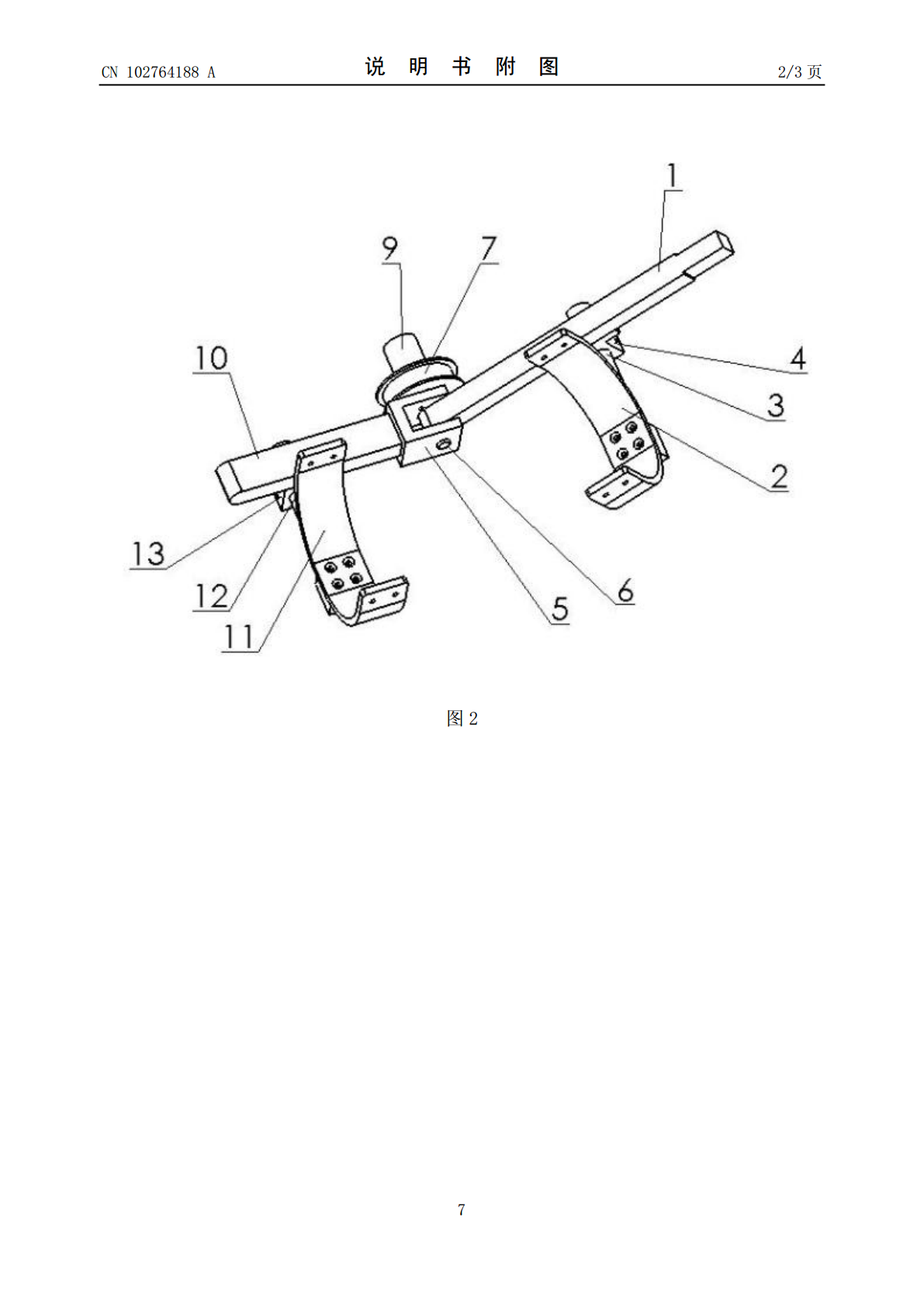
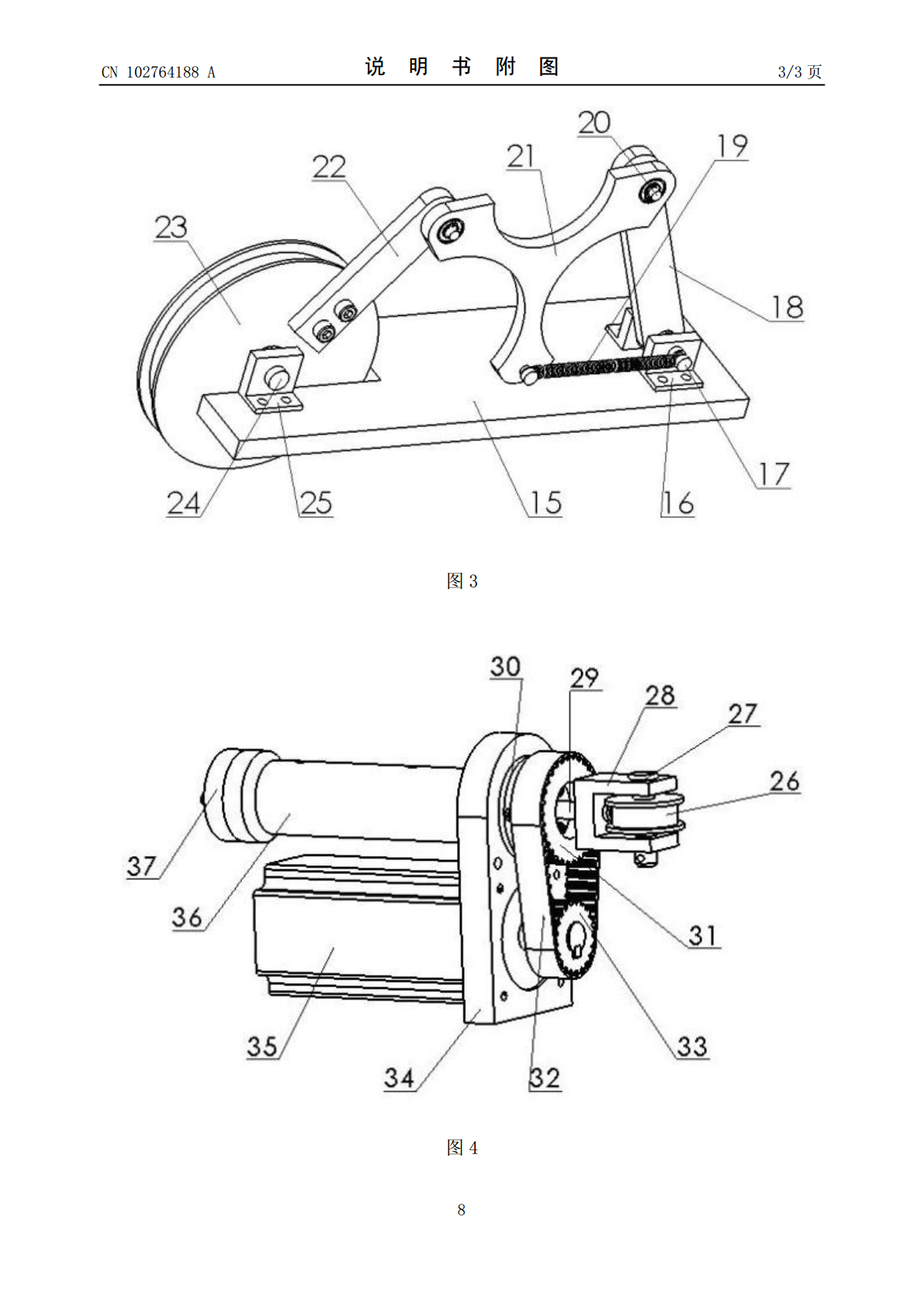
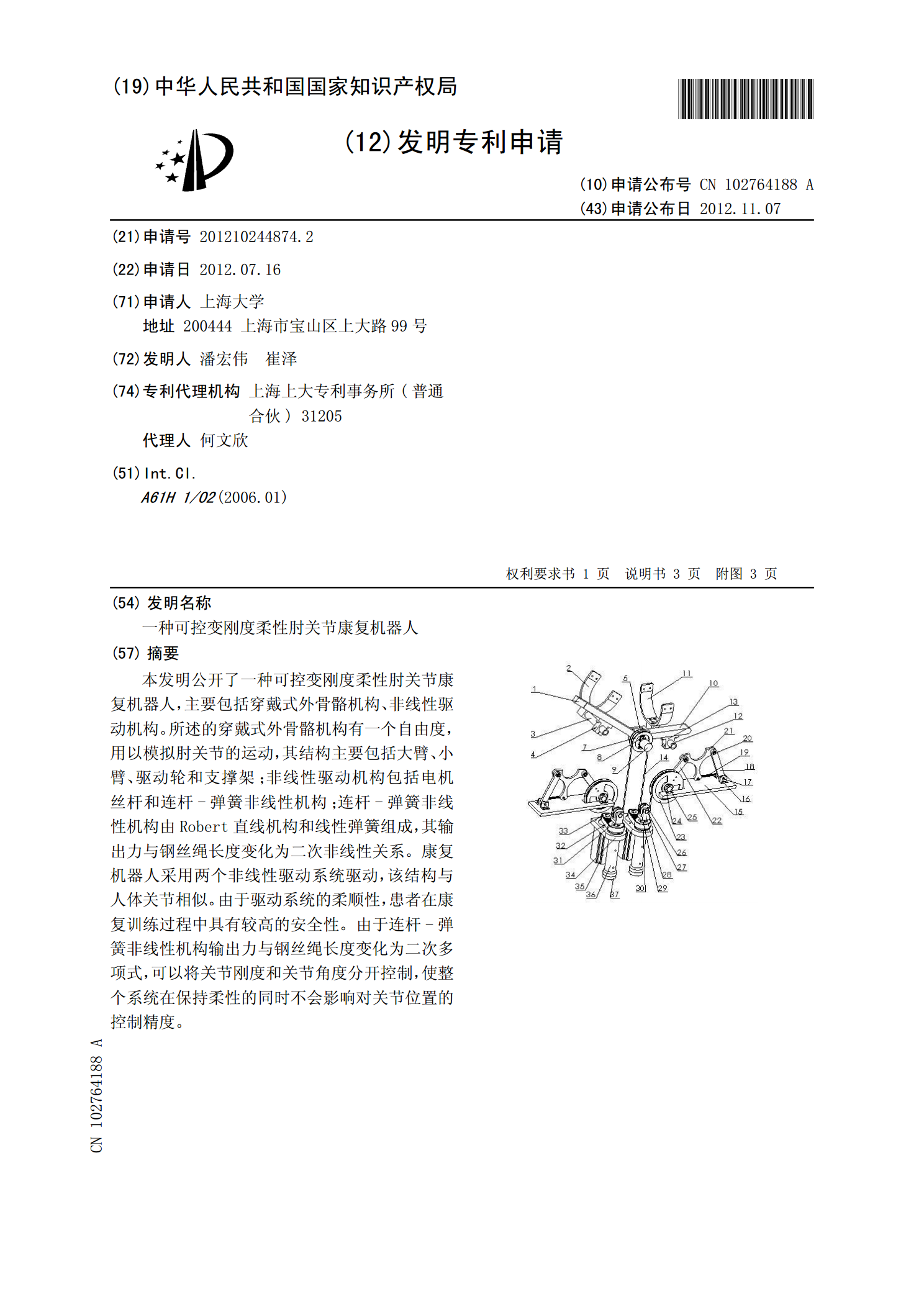
本发明公开了一种可控变刚度柔性肘关节康复机器人,主要包括穿戴式外骨骼机构、非线性驱动机构。所述的穿戴式外骨骼机构有一个自由度,用以模拟肘关节的运动,其结构主要包括大臂、小臂、驱动轮和支撑架;非线性驱动机构包括电机丝杆和连杆-弹簧非线性机构;连杆-弹簧非线性机构由Robert直线机构和线性弹簧组成,其输出力与钢丝绳长度变化为二次非线性关系。康复机器人采用两个非线性驱动系统驱动,该结构与人体关节相似。由于驱动系统的柔顺性,患者在康复训练过程中具有较高的安全性。由于连杆-弹簧非线性机构输出力与钢丝绳长度变化为二
空间可控时变刚度柔性关节装置.pdf
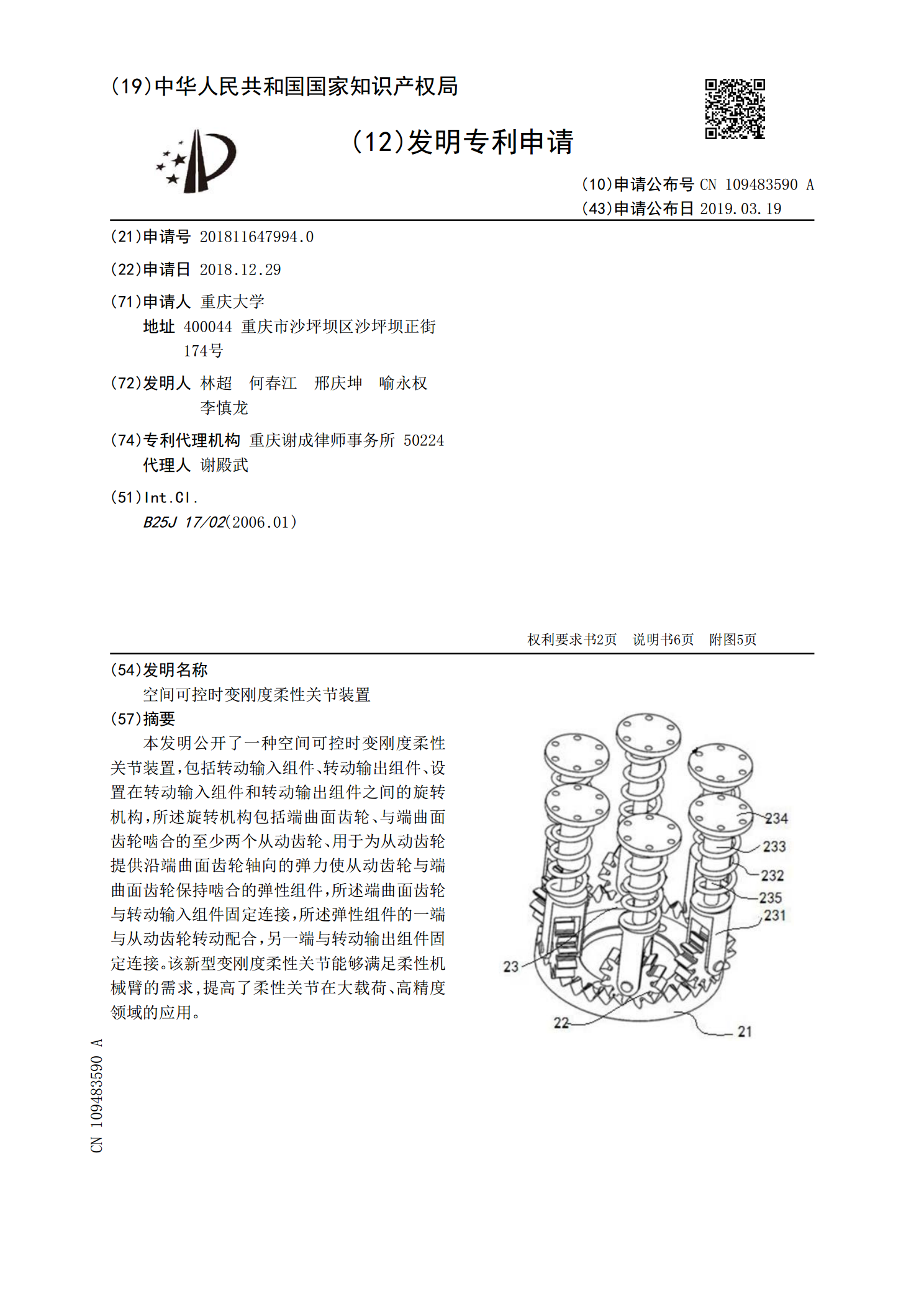
本发明公开了一种空间可控时变刚度柔性关节装置,包括转动输入组件、转动输出组件、设置在转动输入组件和转动输出组件之间的旋转机构,所述旋转机构包括端曲面齿轮、与端曲面齿轮啮合的至少两个从动齿轮、用于为从动齿轮提供沿端曲面齿轮轴向的弹力使从动齿轮与端曲面齿轮保持啮合的弹性组件,所述端曲面齿轮与转动输入组件固定连接,所述弹性组件的一端与从动齿轮转动配合,另一端与转动输出组件固定连接。该新型变刚度柔性关节能够满足柔性机械臂的需求,提高了柔性关节在大载荷、高精度领域的应用。
一种柔性机器人变刚度关节.pdf
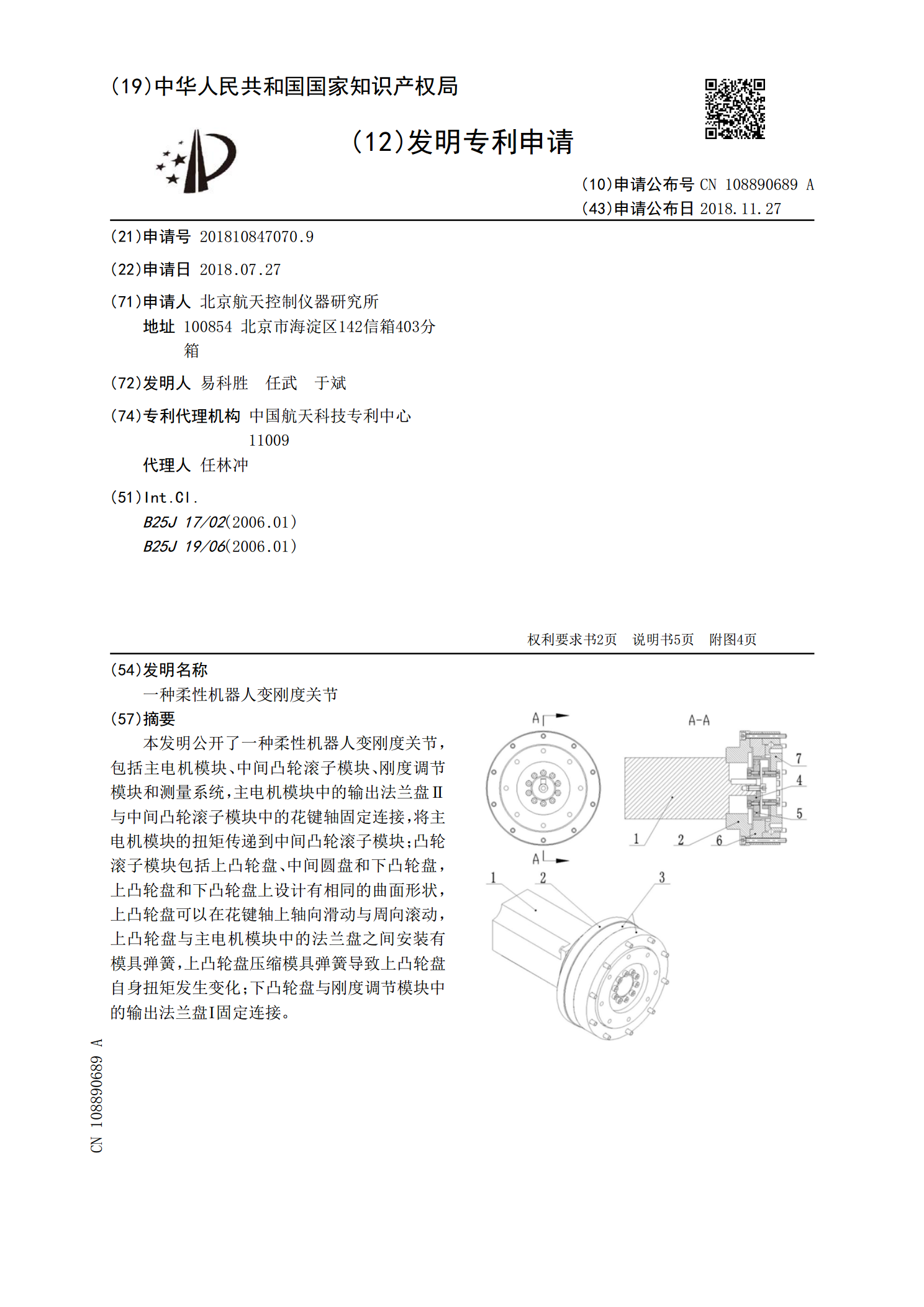
本发明公开了一种柔性机器人变刚度关节,包括主电机模块、中间凸轮滚子模块、刚度调节模块和测量系统,主电机模块中的输出法兰盘Ⅱ与中间凸轮滚子模块中的花键轴固定连接,将主电机模块的扭矩传递到中间凸轮滚子模块;凸轮滚子模块包括上凸轮盘、中间圆盘和下凸轮盘,上凸轮盘和下凸轮盘上设计有相同的曲面形状,上凸轮盘可以在花键轴上轴向滑动与周向滚动,上凸轮盘与主电机模块中的法兰盘之间安装有模具弹簧,上凸轮盘压缩模具弹簧导致上凸轮盘自身扭矩发生变化;下凸轮盘与刚度调节模块中的输出法兰盘Ⅰ固定连接。
仿人肘关节型机器人变刚度关节.pdf
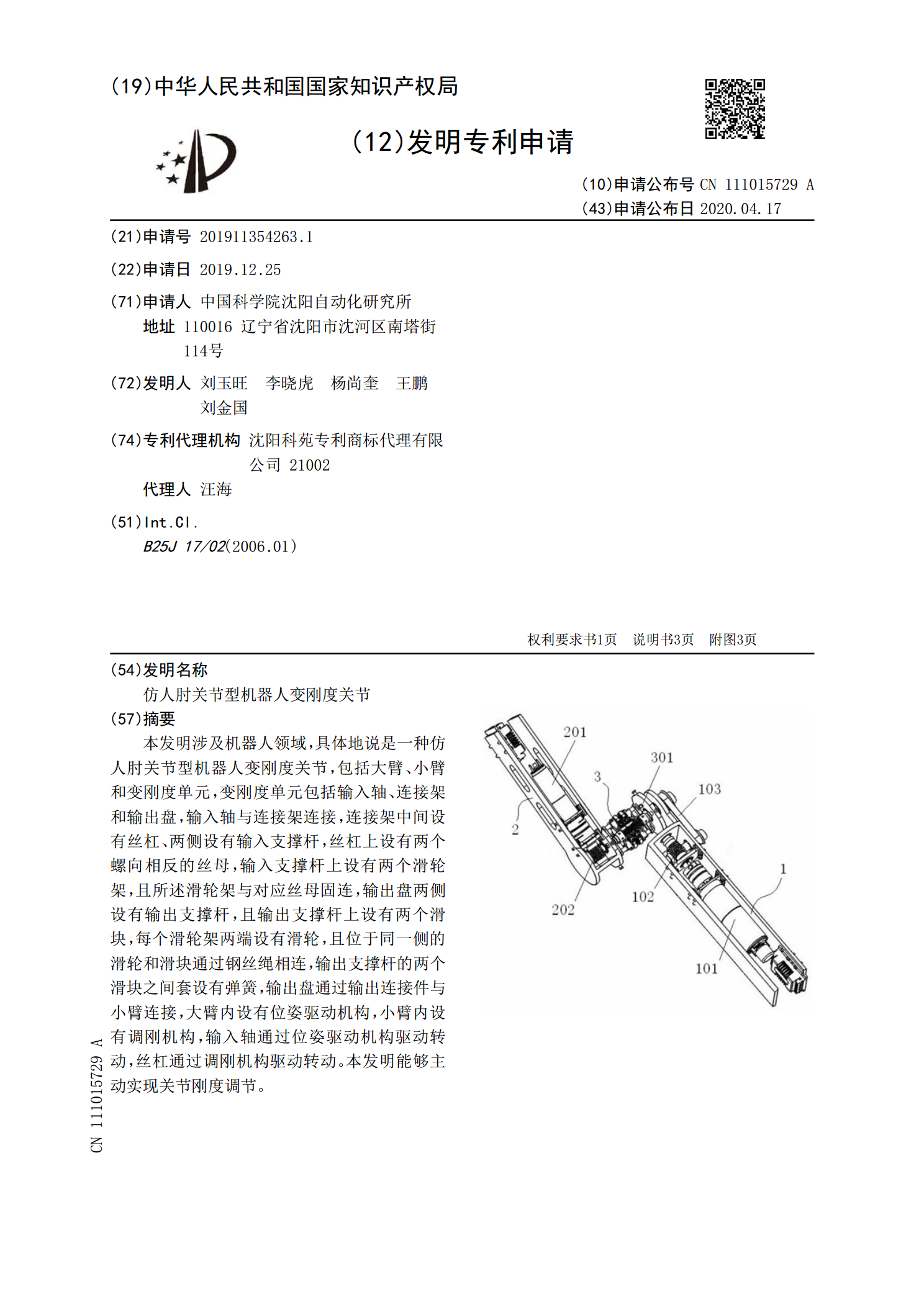
本发明涉及机器人领域,具体地说是一种仿人肘关节型机器人变刚度关节,包括大臂、小臂和变刚度单元,变刚度单元包括输入轴、连接架和输出盘,输入轴与连接架连接,连接架中间设有丝杠、两侧设有输入支撑杆,丝杠上设有两个螺向相反的丝母,输入支撑杆上设有两个滑轮架,且所述滑轮架与对应丝母固连,输出盘两侧设有输出支撑杆,且输出支撑杆上设有两个滑块,每个滑轮架两端设有滑轮,且位于同一侧的滑轮和滑块通过钢丝绳相连,输出支撑杆的两个滑块之间套设有弹簧,输出盘通过输出连接件与小臂连接,大臂内设有位姿驱动机构,小臂内设有调刚机构,输
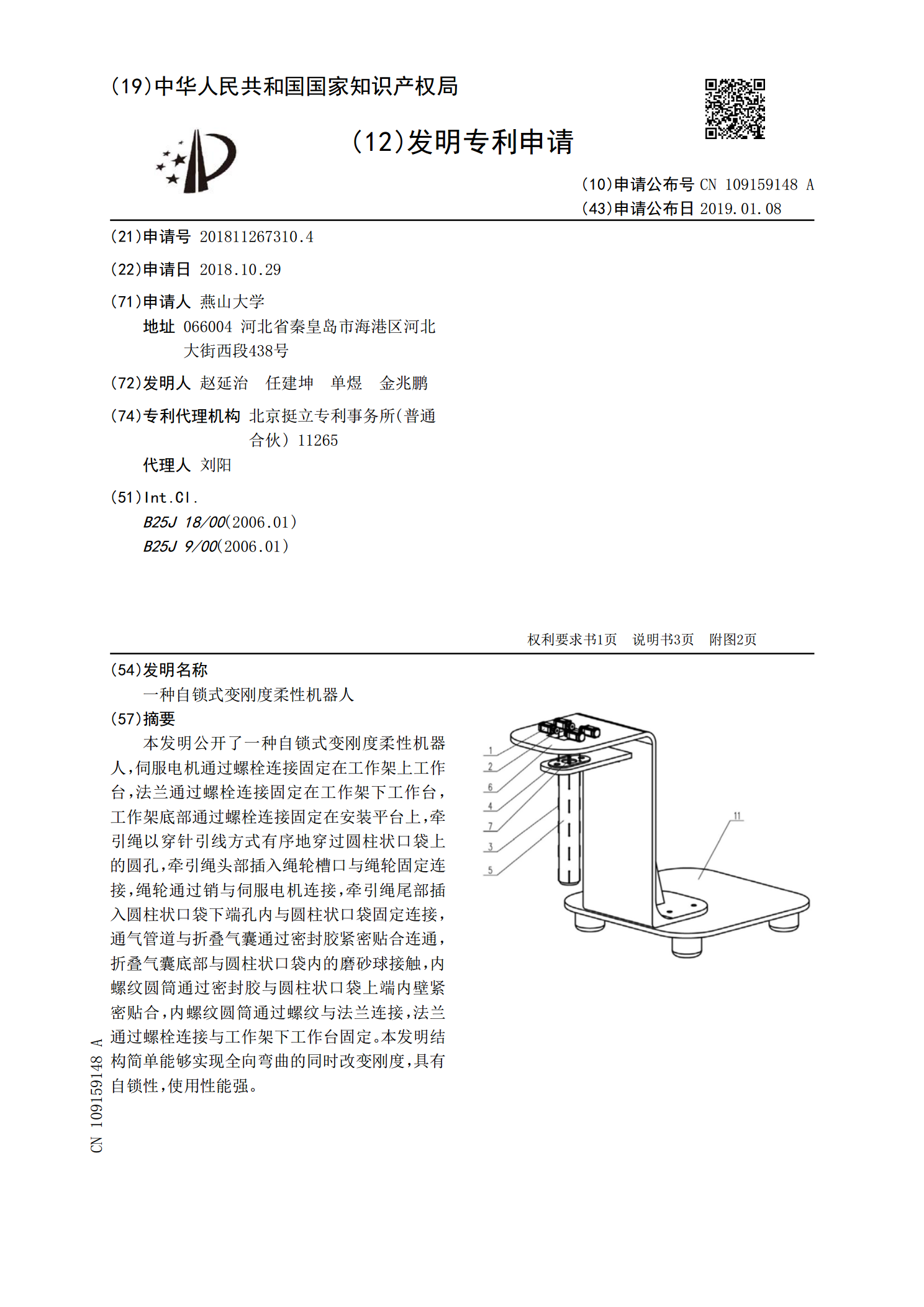
一种自锁式变刚度柔性机器人.pdf
本发明公开了一种自锁式变刚度柔性机器人,伺服电机通过螺栓连接固定在工作架上工作台,法兰通过螺栓连接固定在工作架下工作台,工作架底部通过螺栓连接固定在安装平台上,牵引绳以穿针引线方式有序地穿过圆柱状口袋上的圆孔,牵引绳头部插入绳轮槽口与绳轮固定连接,绳轮通过销与伺服电机连接,牵引绳尾部插入圆柱状口袋下端孔内与圆柱状口袋固定连接,通气管道与折叠气囊通过密封胶紧密贴合连通,折叠气囊底部与圆柱状口袋内的磨砂球接触,内螺纹圆筒通过密封胶与圆柱状口袋上端内壁紧密贴合,内螺纹圆筒通过螺纹与法兰连接,法兰通过螺栓连接与工