
一种用于管道内爬行的仿生尺蠖.pdf

飞飙****ng


1/9

2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于管道内爬行的仿生尺蠖.pdf
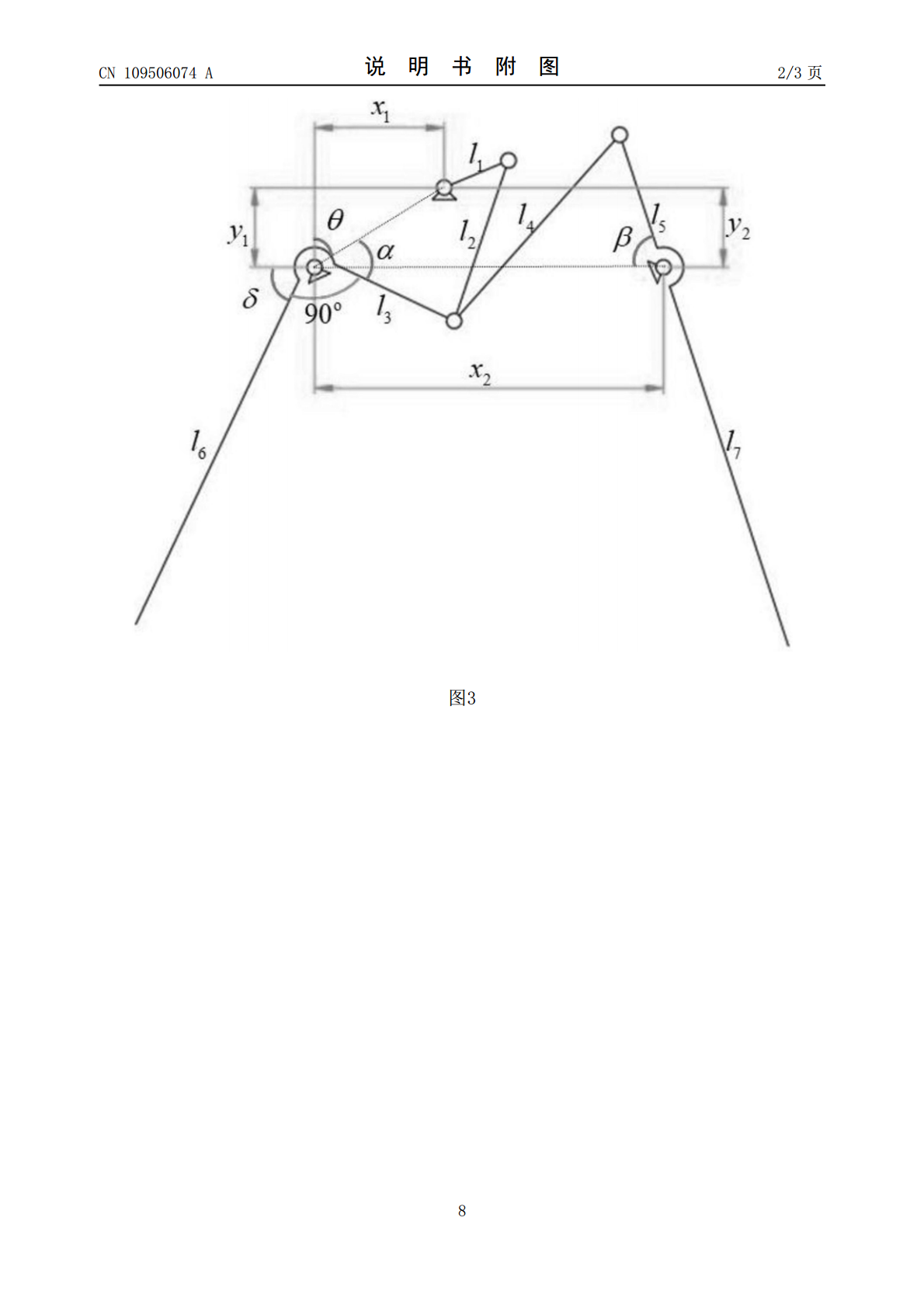
本发明公开一种用于管道内爬行的仿生尺蠖,所述仿生尺蠖包括:驱动机构、传动系统、执行机构,通过所述驱动机构对所述执行机构提供动力,实现所述仿生尺蠖前行探索的任务;所述执行机构为曲柄摇杆机构和双摇杆机构,搭载带棘轮机构的轮子,通过曲柄摇杆和双摇杆机构的组合模仿“尺蠖”躯干的伸缩动作,利用棘轮机构来实现“前部”和“后部”的轮流制动,通过蜗轮蜗杆的传动系统实现减速并达到指定传动比,由此制作出可以在一般较为平直的管道中稳定、快速前进的仿生尺蠖装置。
一种仿生蠕动型管道内爬行器及其爬行方法.pdf
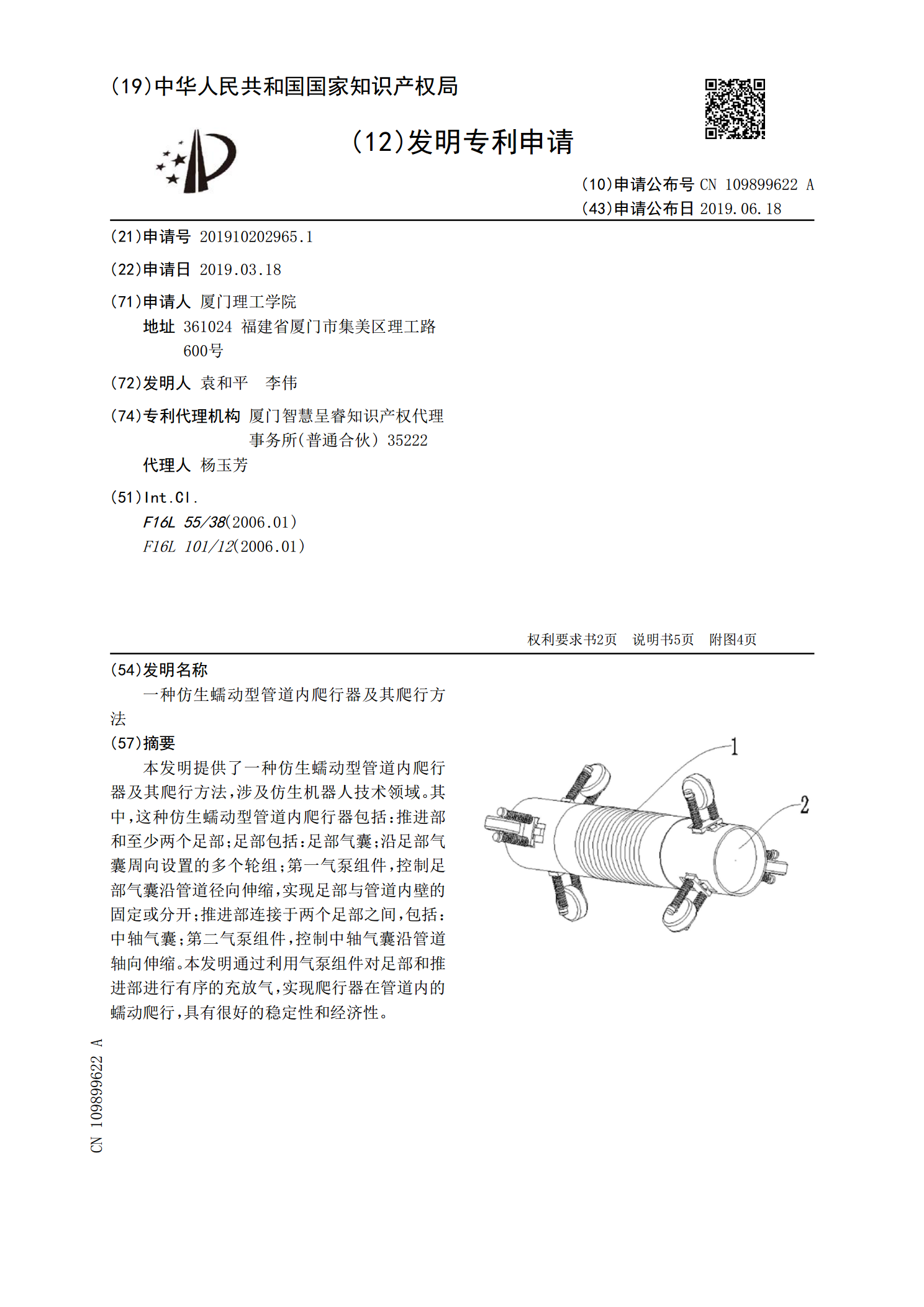
本发明提供了一种仿生蠕动型管道内爬行器及其爬行方法,涉及仿生机器人技术领域。其中,这种仿生蠕动型管道内爬行器包括:推进部和至少两个足部;足部包括:足部气囊;沿足部气囊周向设置的多个轮组;第一气泵组件,控制足部气囊沿管道径向伸缩,实现足部与管道内壁的固定或分开;推进部连接于两个足部之间,包括:中轴气囊;第二气泵组件,控制中轴气囊沿管道轴向伸缩。本发明通过利用气泵组件对足部和推进部进行有序的充放气,实现爬行器在管道内的蠕动爬行,具有很好的稳定性和经济性。

用于管道内爬行机器人的行走装置.pdf
本发明公开了用于管道内爬行机器人的行走装置,包括固定壳、液压装置和伸缩器,其所述固定壳矩形空腔体,且固定壳内部设置有液压装置,所述液压装置由液压撑杆、液压动力单元、液压伸缩杆和连接器,所述液压撑杆设置于固定壳内腔前后两端,且两支液压撑杆通过连接器相连接,所述连接器为液压连接管,且连接器右部设置有液压动力单元;所述液压撑杆通过连接杆与液压伸缩杆相连接,且液压伸缩杆下部设置有伸缩器,所述伸缩器通过伸缩杆与驱动电机相连接,且驱动电机驱动轴上设置有车轮。本发明用于解决机器人在管道内遇到障碍物时难以通过的问题,同时

一种用于结构件探伤的仿生尺蠖机器人.pdf
本发明公开了一种用于结构件探伤的仿生尺蠖机器人,涉及智能机器人技术领域,包括承载板,承载板的两端对称设置有支腿装置,支腿装置包括依次设置的第一舵机、伸缩机构、第二舵机和回转机构;回转机构包括回转座、回转舵机和连接板,回转舵机固定设置于回转座上,回转舵机的输出轴与连接板的一端固定连接;伸缩机构的一端通过第一舵机与承载板可转动的连接,伸缩机构的另一端通过第二舵机与连接板的一端可转动连接,第一舵机的输出轴和第二舵机的输出轴相互平行,第二舵机的输出轴与回转舵机的输出轴呈空间垂直关系。该仿生尺蠖机器人,其可取代人工
管道内自爬行装置.pdf
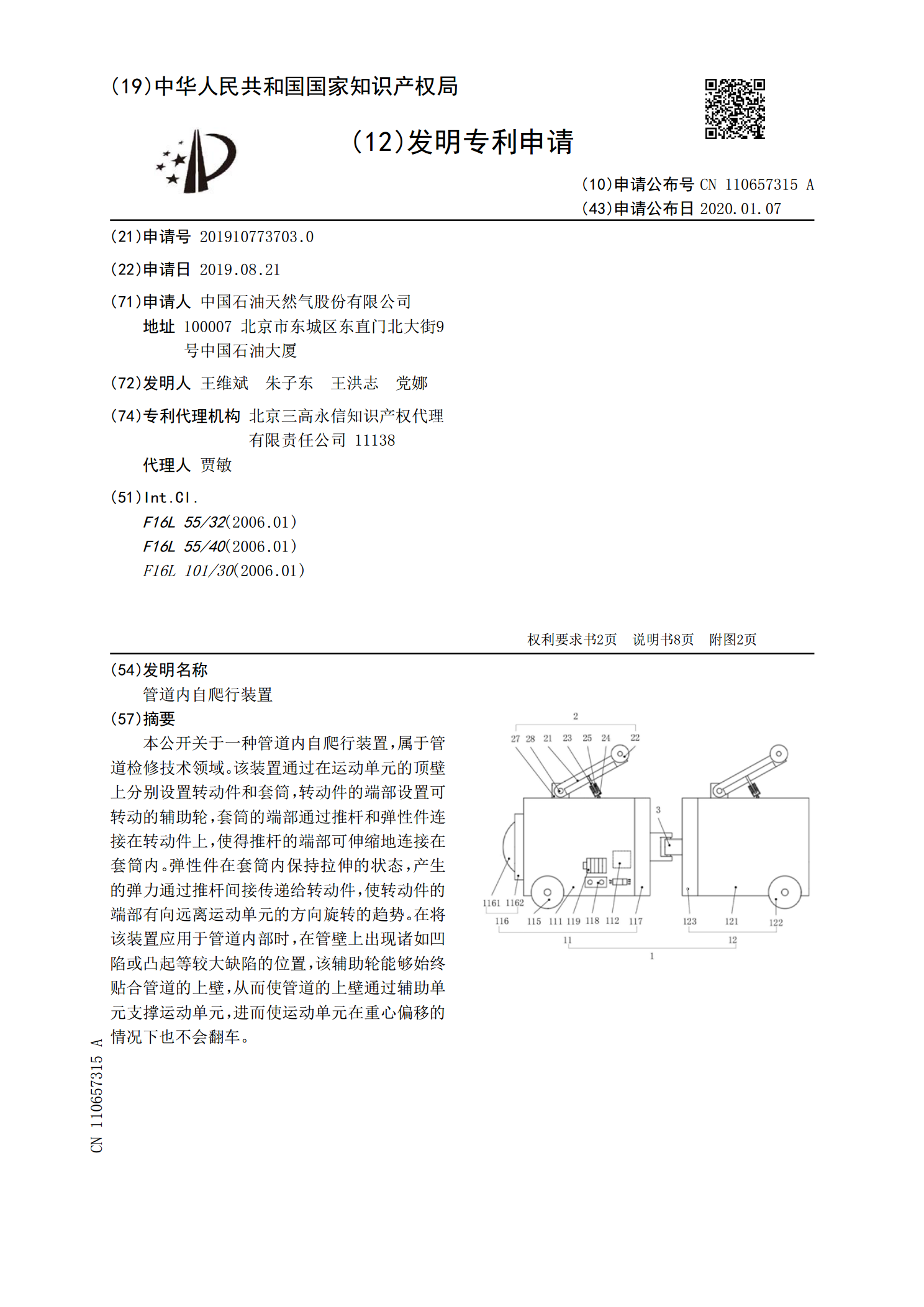
本公开关于一种管道内自爬行装置,属于管道检修技术领域。该装置通过在运动单元的顶壁上分别设置转动件和套筒,转动件的端部设置可转动的辅助轮,套筒的端部通过推杆和弹性件连接在转动件上,使得推杆的端部可伸缩地连接在套筒内。弹性件在套筒内保持拉伸的状态,产生的弹力通过推杆间接传递给转动件,使转动件的端部有向远离运动单元的方向旋转的趋势。在将该装置应用于管道内部时,在管壁上出现诸如凹陷或凸起等较大缺陷的位置,该辅助轮能够始终贴合管道的上壁,从而使管道的上壁通过辅助单元支撑运动单元,进而使运动单元在重心偏移的情况下也不