
一种仿生蠕动型管道内爬行器及其爬行方法.pdf

淑然****by

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仿生蠕动型管道内爬行器及其爬行方法.pdf
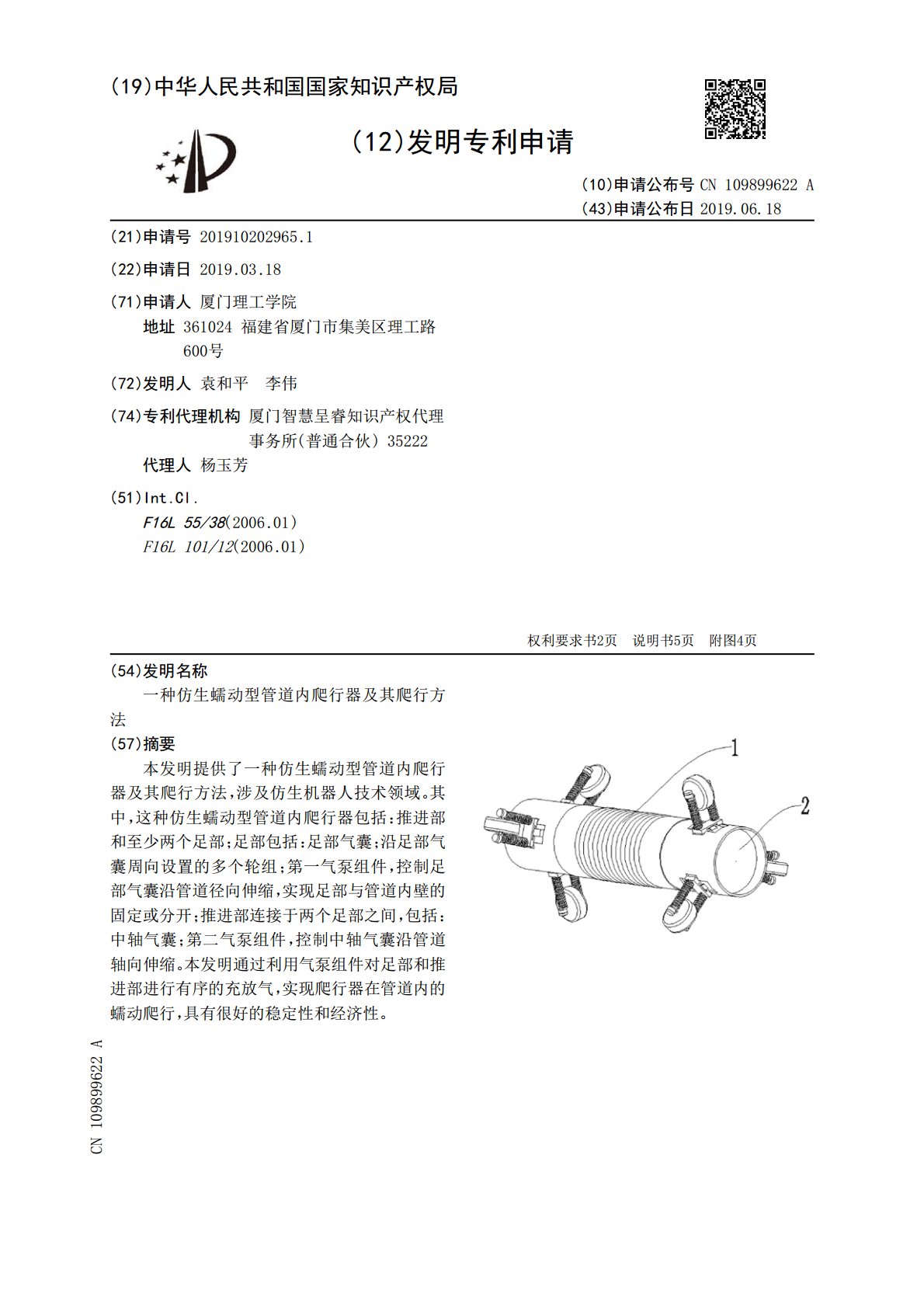
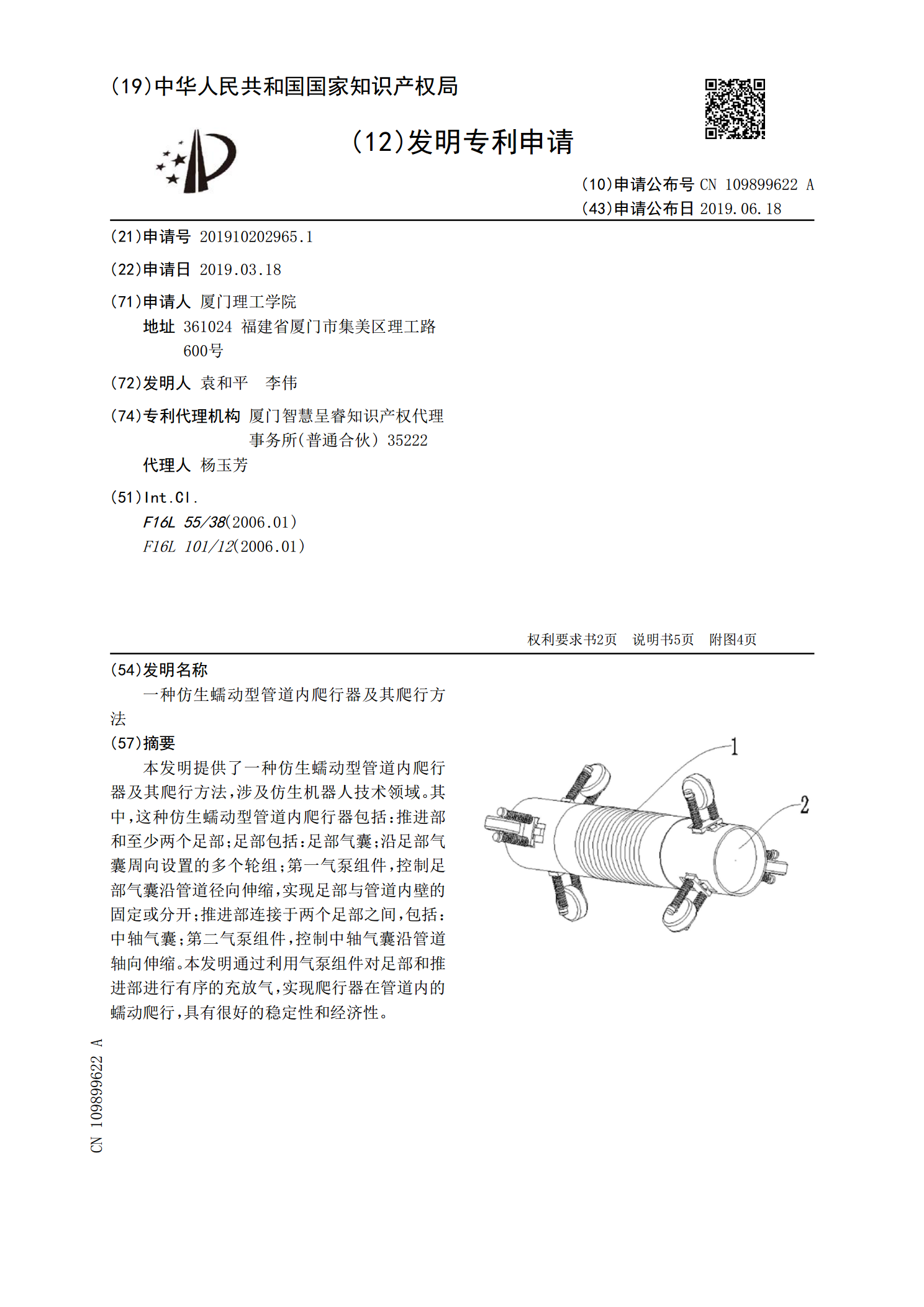
本发明提供了一种仿生蠕动型管道内爬行器及其爬行方法,涉及仿生机器人技术领域。其中,这种仿生蠕动型管道内爬行器包括:推进部和至少两个足部;足部包括:足部气囊;沿足部气囊周向设置的多个轮组;第一气泵组件,控制足部气囊沿管道径向伸缩,实现足部与管道内壁的固定或分开;推进部连接于两个足部之间,包括:中轴气囊;第二气泵组件,控制中轴气囊沿管道轴向伸缩。本发明通过利用气泵组件对足部和推进部进行有序的充放气,实现爬行器在管道内的蠕动爬行,具有很好的稳定性和经济性。
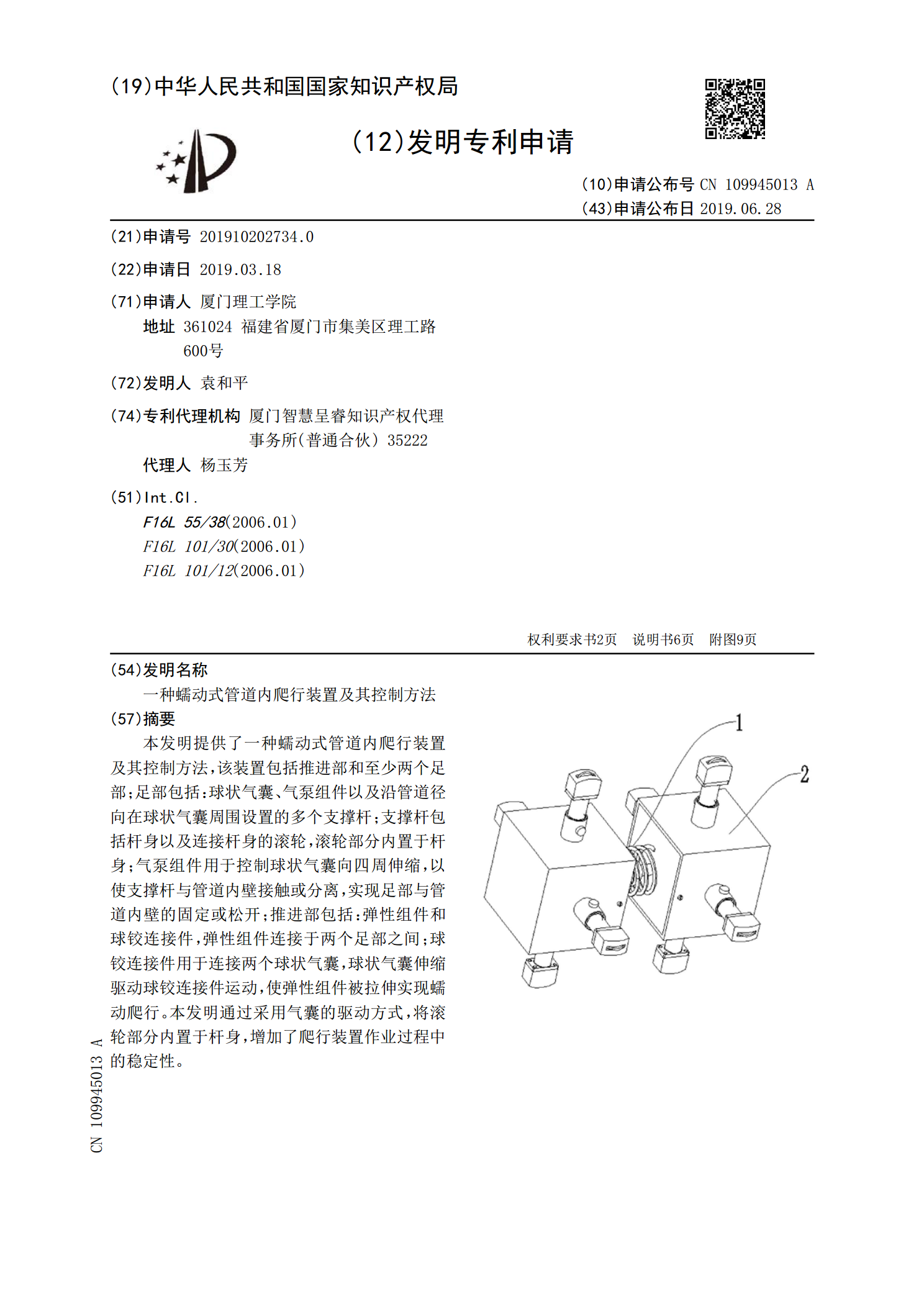
一种蠕动式管道内爬行装置及其控制方法.pdf
本发明提供了一种蠕动式管道内爬行装置及其控制方法,该装置包括推进部和至少两个足部;足部包括:球状气囊、气泵组件以及沿管道径向在球状气囊周围设置的多个支撑杆;支撑杆包括杆身以及连接杆身的滚轮,滚轮部分内置于杆身;气泵组件用于控制球状气囊向四周伸缩,以使支撑杆与管道内壁接触或分离,实现足部与管道内壁的固定或松开;推进部包括:弹性组件和球铰连接件,弹性组件连接于两个足部之间;球铰连接件用于连接两个球状气囊,球状气囊伸缩驱动球铰连接件运动,使弹性组件被拉伸实现蠕动爬行。本发明通过采用气囊的驱动方式,将滚轮部分内置

一种用于管道内爬行的仿生尺蠖.pdf
本发明公开一种用于管道内爬行的仿生尺蠖,所述仿生尺蠖包括:驱动机构、传动系统、执行机构,通过所述驱动机构对所述执行机构提供动力,实现所述仿生尺蠖前行探索的任务;所述执行机构为曲柄摇杆机构和双摇杆机构,搭载带棘轮机构的轮子,通过曲柄摇杆和双摇杆机构的组合模仿“尺蠖”躯干的伸缩动作,利用棘轮机构来实现“前部”和“后部”的轮流制动,通过蜗轮蜗杆的传动系统实现减速并达到指定传动比,由此制作出可以在一般较为平直的管道中稳定、快速前进的仿生尺蠖装置。
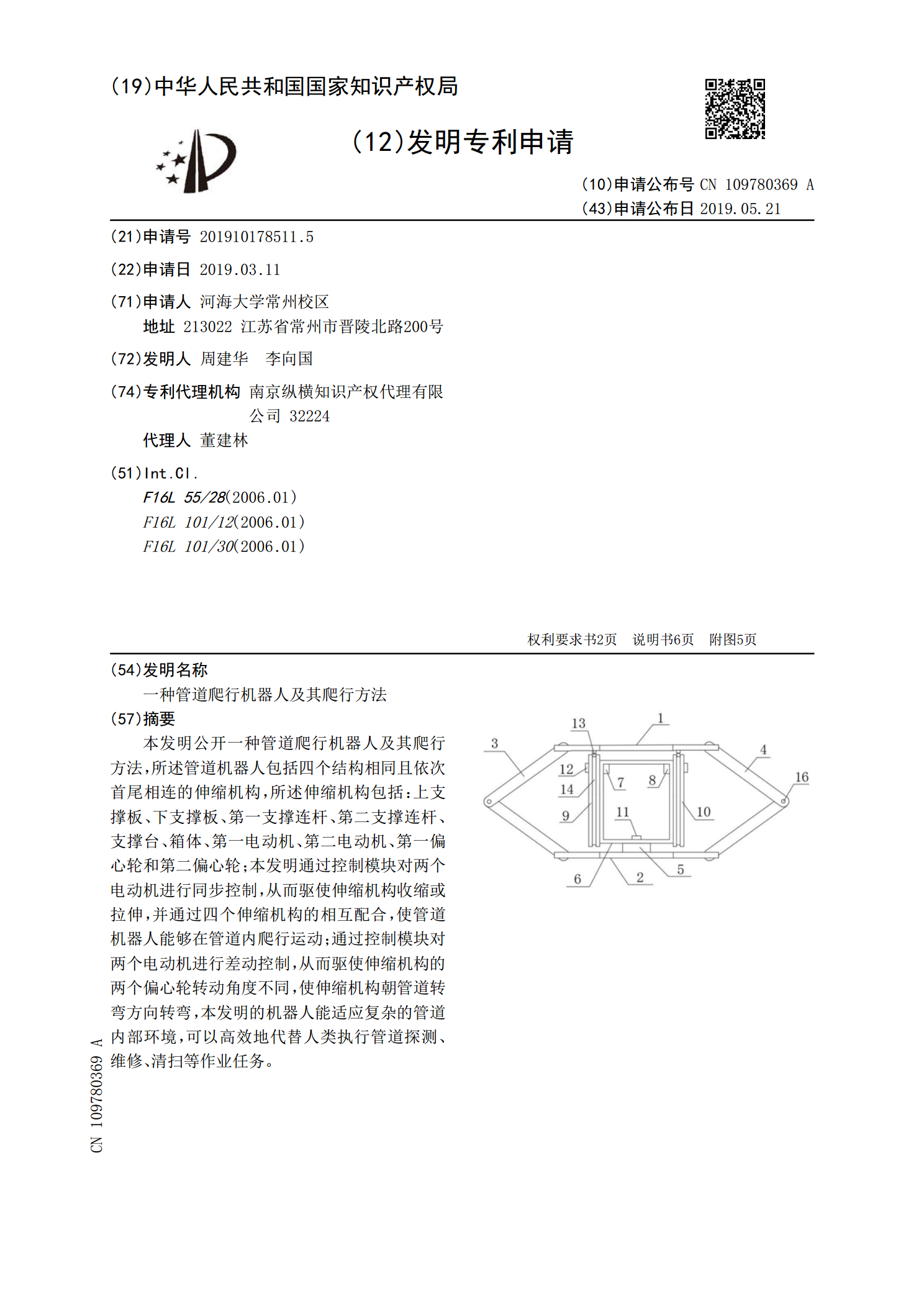
一种管道爬行机器人及其爬行方法.pdf
本发明公开一种管道爬行机器人及其爬行方法,所述管道机器人包括四个结构相同且依次首尾相连的伸缩机构,所述伸缩机构包括:上支撑板、下支撑板、第一支撑连杆、第二支撑连杆、支撑台、箱体、第一电动机、第二电动机、第一偏心轮和第二偏心轮;本发明通过控制模块对两个电动机进行同步控制,从而驱使伸缩机构收缩或拉伸,并通过四个伸缩机构的相互配合,使管道机器人能够在管道内爬行运动;通过控制模块对两个电动机进行差动控制,从而驱使伸缩机构的两个偏心轮转动角度不同,使伸缩机构朝管道转弯方向转弯,本发明的机器人能适应复杂的管道内部环境
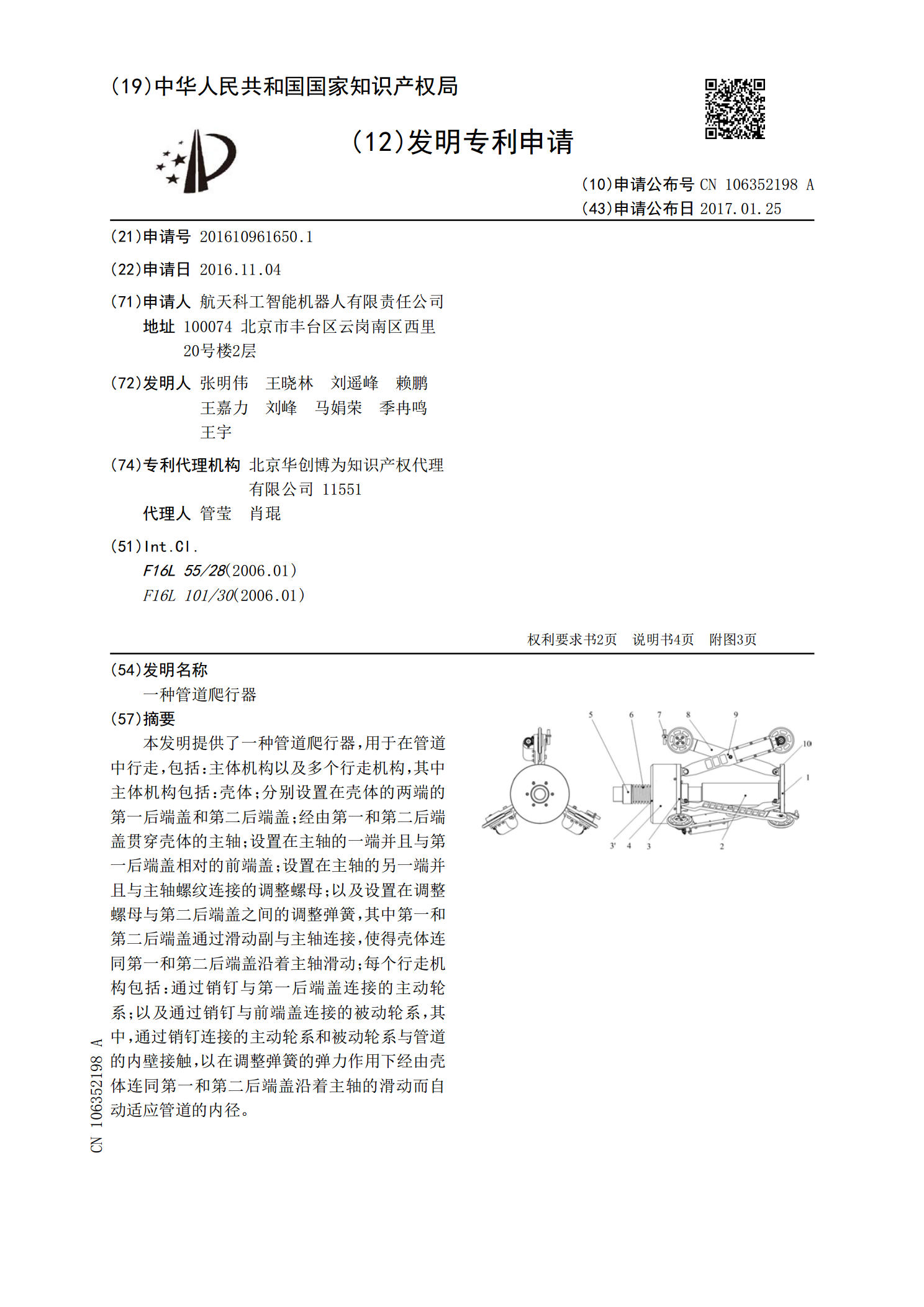
一种管道爬行器.pdf
本发明提供了一种管道爬行器,用于在管道中行走,包括:主体机构以及多个行走机构,其中主体机构包括:壳体;分别设置在壳体的两端的第一后端盖和第二后端盖;经由第一和第二后端盖贯穿壳体的主轴;设置在主轴的一端并且与第一后端盖相对的前端盖;设置在主轴的另一端并且与主轴螺纹连接的调整螺母;以及设置在调整螺母与第二后端盖之间的调整弹簧,其中第一和第二后端盖通过滑动副与主轴连接,使得壳体连同第一和第二后端盖沿着主轴滑动;每个行走机构包括:通过销钉与第一后端盖连接的主动轮系;以及通过销钉与前端盖连接的被动轮系,其中,通过销