
下肢外骨骼并联关节研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢外骨骼并联关节研究的中期报告.docx
下肢外骨骼并联关节研究的中期报告本次研究旨在探究下肢外骨骼并联关节的设计与控制方法,以提高其运动性能和适用性。目前已完成研究的中期报告,具体内容如下:1.设计与制造针对既有的下肢外骨骼单一自由度关节控制模式存在的问题,我们设计了一种多自由度、能够更加贴合人体运动机理的并联关节。并联关节采用了多个驱动电机和传感器,可以实现精细的运动控制和运动数据采集。同时,我们采用3D打印技术进行了关节部件的制造,提高了制造的精度和效率。2.控制算法为了实现关节的精细控制,我们提出了一种基于反向动力学控制的控制算法。该算法
下肢康复用并联式外骨骼膝关节的设计.pdf
高技术通讯年第卷第期::下肢康复用并联式外骨骼膝关节的设计!印松!殷跃红(上海交通大学机器人研究所上海)摘要提出了下肢瘫痪病人康复用并联式外骨骼膝关节的设计方法。通过分析传统单自由度转动副和多连杆机构的不足,采用平面二自由度并联机构对膝关节外骨骼化,以提高外骨骼膝关节的仿生性和通用性,并提出了该机构辅助人体膝关节进行康复训练的实施方案。在运动学分析的基础上,以满足人体正常行走时膝关节的运动范围要求和提高机构运动学性能为目标进行了结构参数优化设计。初步分析表明,该机构用于下肢瘫痪病人康复训练时具有仿生性高和

髋关节助力外骨骼的设计与研究的中期报告.docx
髋关节助力外骨骼的设计与研究的中期报告髋关节助力外骨骼是一种能够增强人体下肢运动能力的装置,其主要的作用是在人体下肢动作的过程中提供矢量力和动力支持,使得人体的行走速度、步幅和身体稳定性等方面均得到显著改善。本文介绍了髋关节助力外骨骼的设计与研究的中期报告。第一部分:研究目标与背景髋关节助力外骨骼的研究旨在解决人体行走时出现的一系列问题,如下肢运动能力的下降、步态不稳定、步行速度缓慢等。这些问题主要是由于身体中的肌肉力量和耐力下降、关节运动受限等原因所导致。有鉴于此,我们希望通过外骨骼的引进和开发,增强人
单肢单驱动外骨骼关节、单肢外骨骼和双下肢外骨骼.pdf
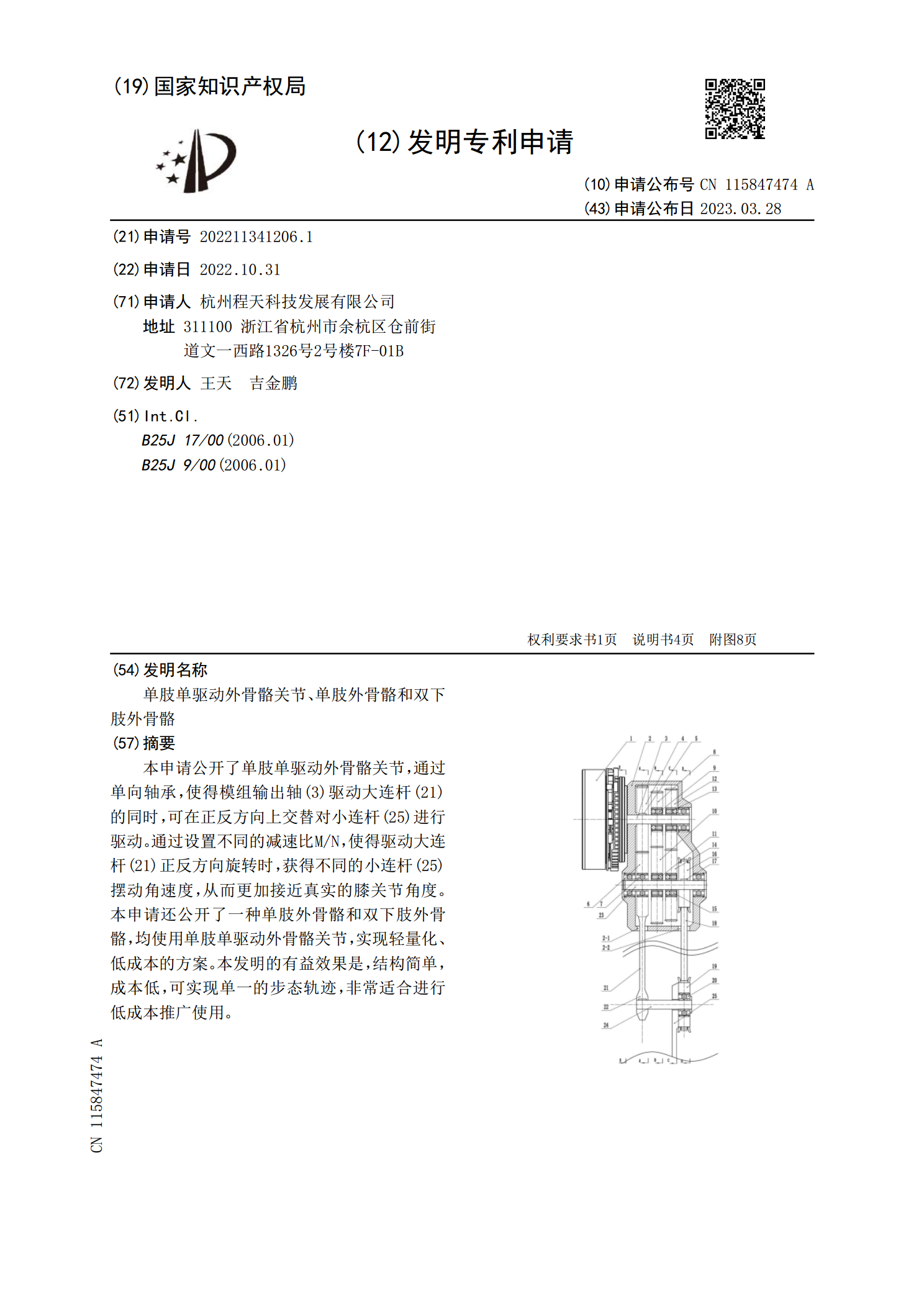
本申请公开了单肢单驱动外骨骼关节,通过单向轴承,使得模组输出轴(3)驱动大连杆(21)的同时,可在正反方向上交替对小连杆(25)进行驱动。通过设置不同的减速比M/N,使得驱动大连杆(21)正反方向旋转时,获得不同的小连杆(25)摆动角速度,从而更加接近真实的膝关节角度。本申请还公开了一种单肢外骨骼和双下肢外骨骼,均使用单肢单驱动外骨骼关节,实现轻量化、低成本的方案。本发明的有益效果是,结构简单,成本低,可实现单一的步态轨迹,非常适合进行低成本推广使用。
穿戴式下肢外骨骼康复机器人髋关节弹簧电机并联驱动器.pdf
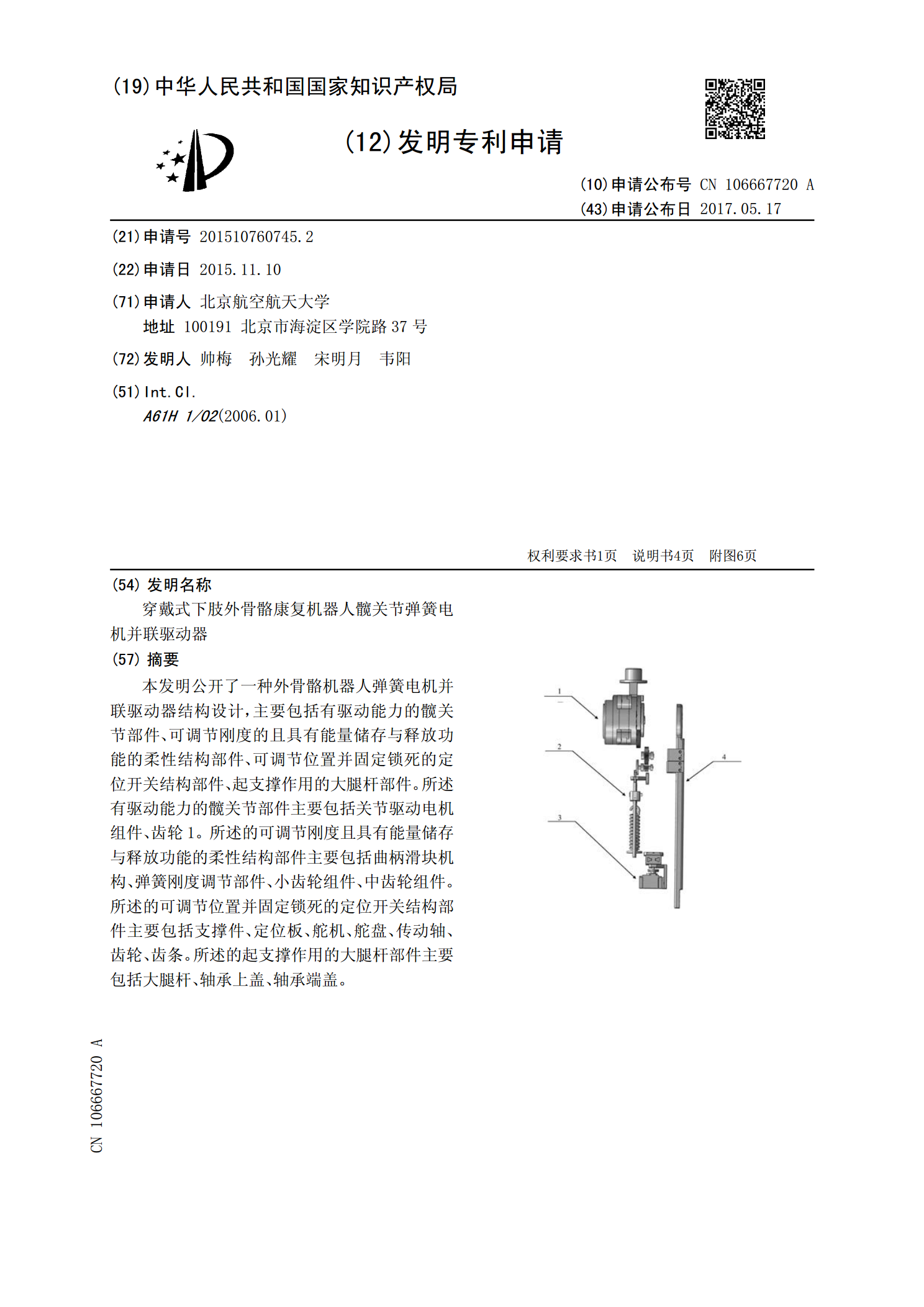
本发明公开了一种外骨骼机器人弹簧电机并联驱动器结构设计,主要包括有驱动能力的髋关节部件、可调节刚度的且具有能量储存与释放功能的柔性结构部件、可调节位置并固定锁死的定位开关结构部件、起支撑作用的大腿杆部件。所述有驱动能力的髋关节部件主要包括关节驱动电机组件、齿轮1。所述的可调节刚度且具有能量储存与释放功能的柔性结构部件主要包括曲柄滑块机构、弹簧刚度调节部件、小齿轮组件、中齿轮组件。所述的可调节位置并固定锁死的定位开关结构部件主要包括支撑件、定位板、舵机、舵盘、传动轴、齿轮、齿条。所述的起支撑作用的大腿杆部件