
单肢单驱动外骨骼关节、单肢外骨骼和双下肢外骨骼.pdf

玉军****la

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
单肢单驱动外骨骼关节、单肢外骨骼和双下肢外骨骼.pdf
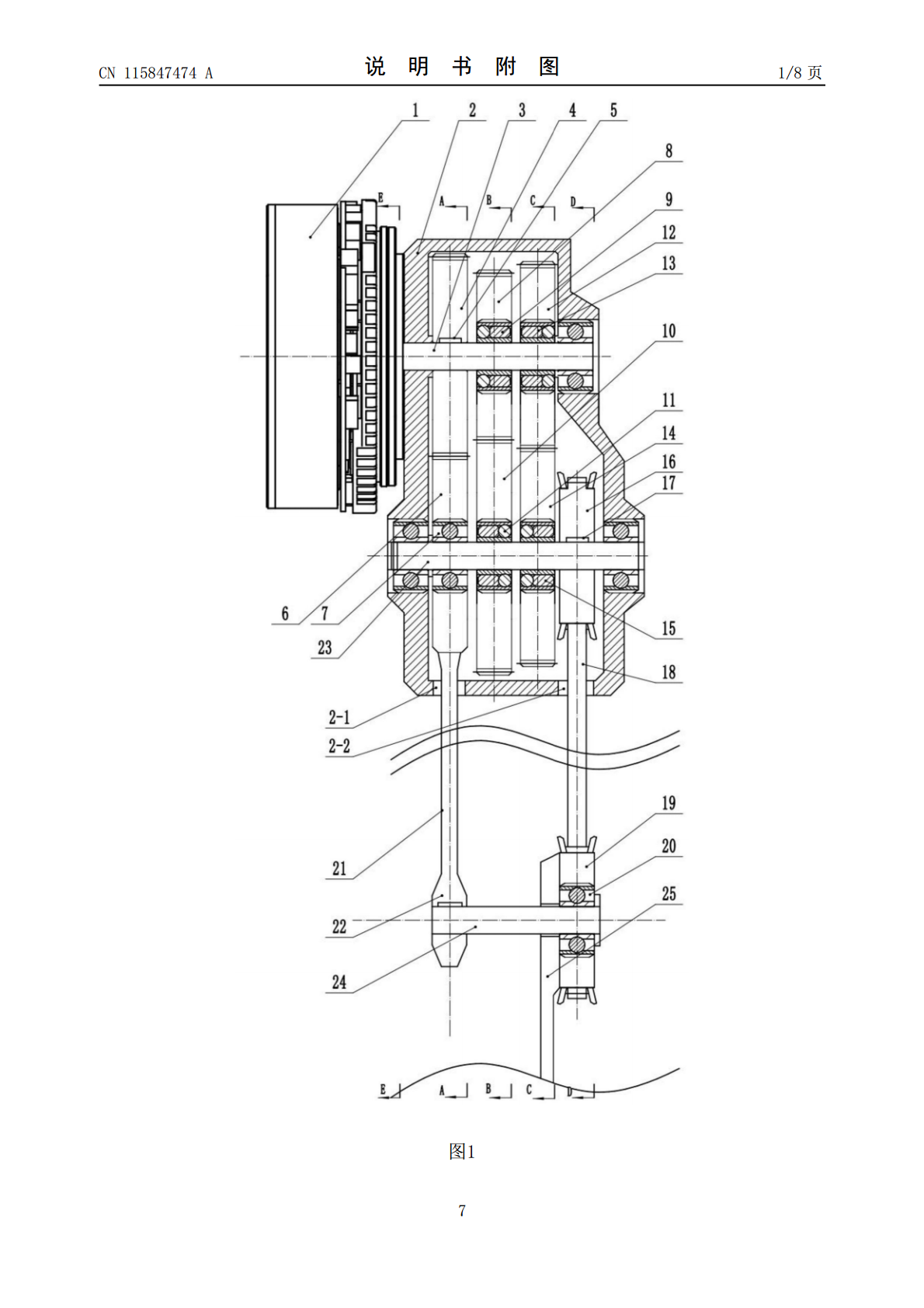
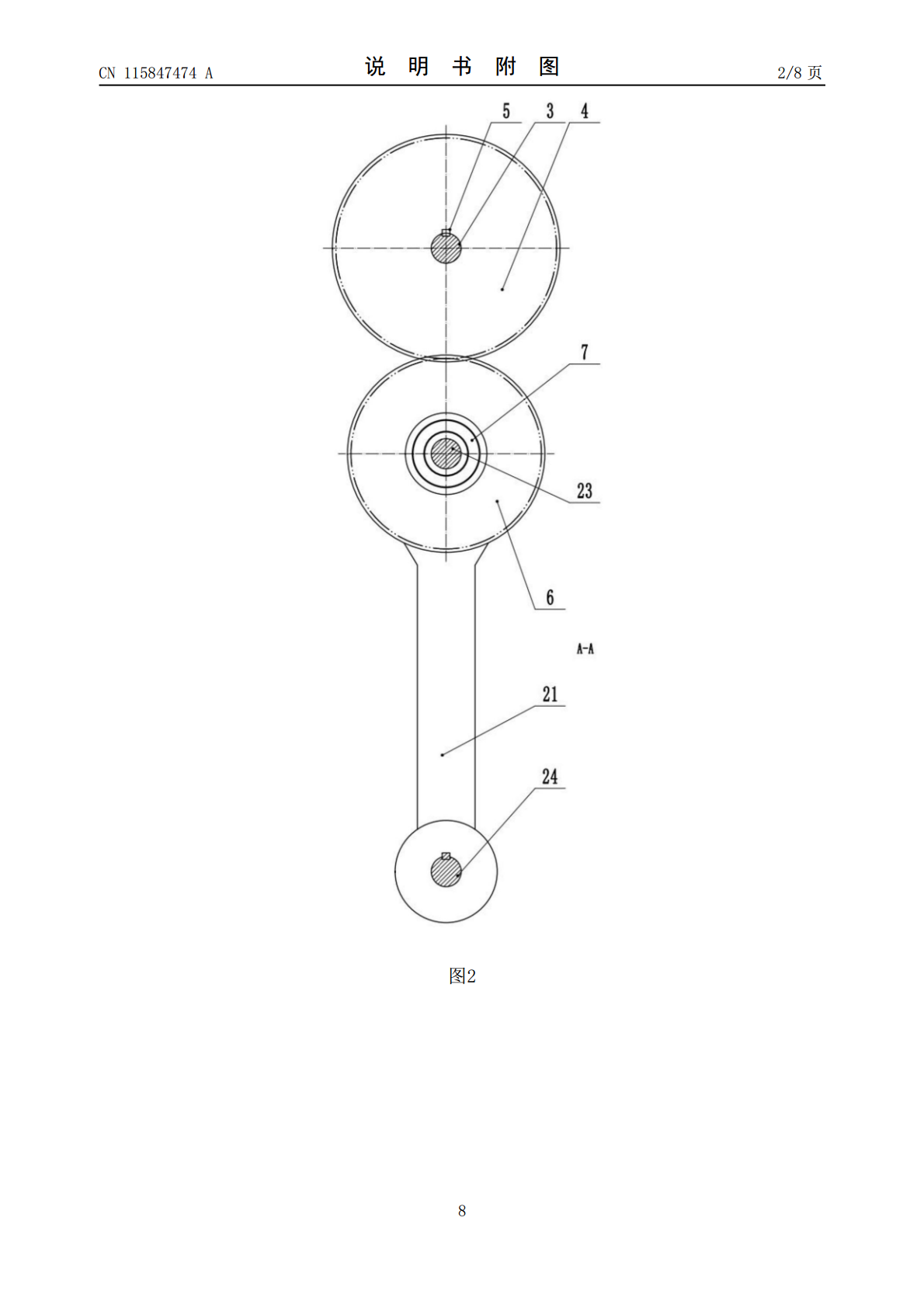
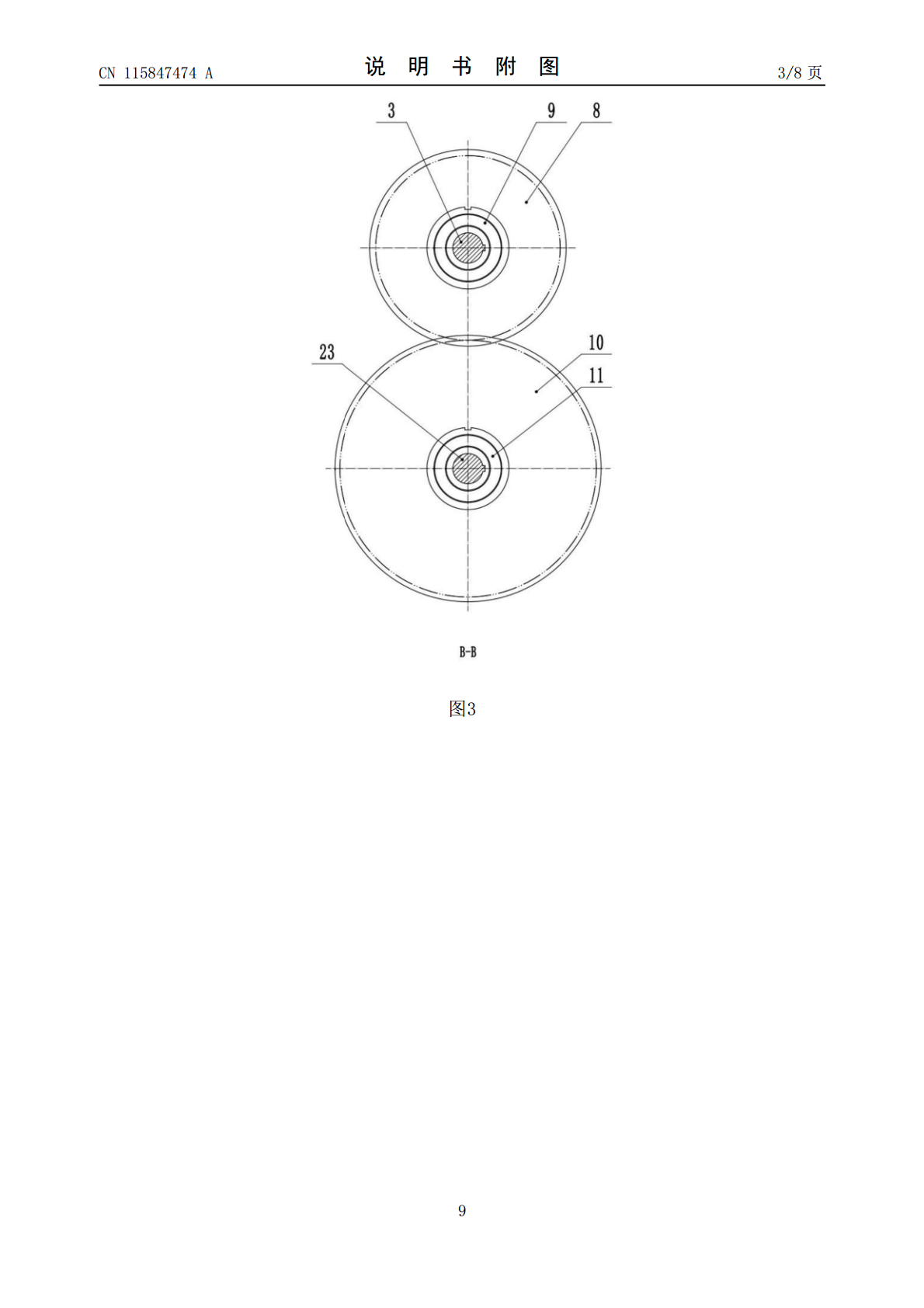
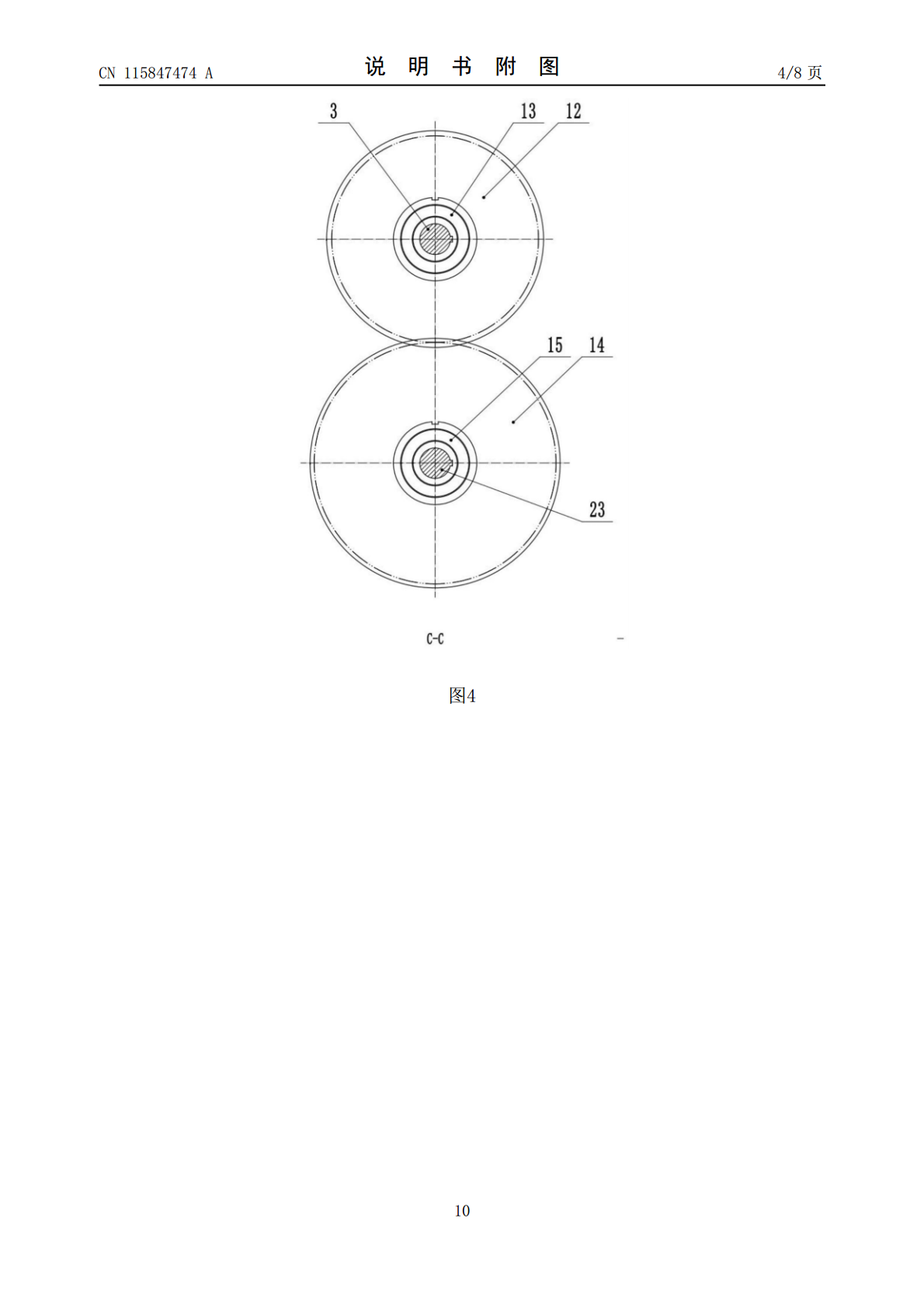
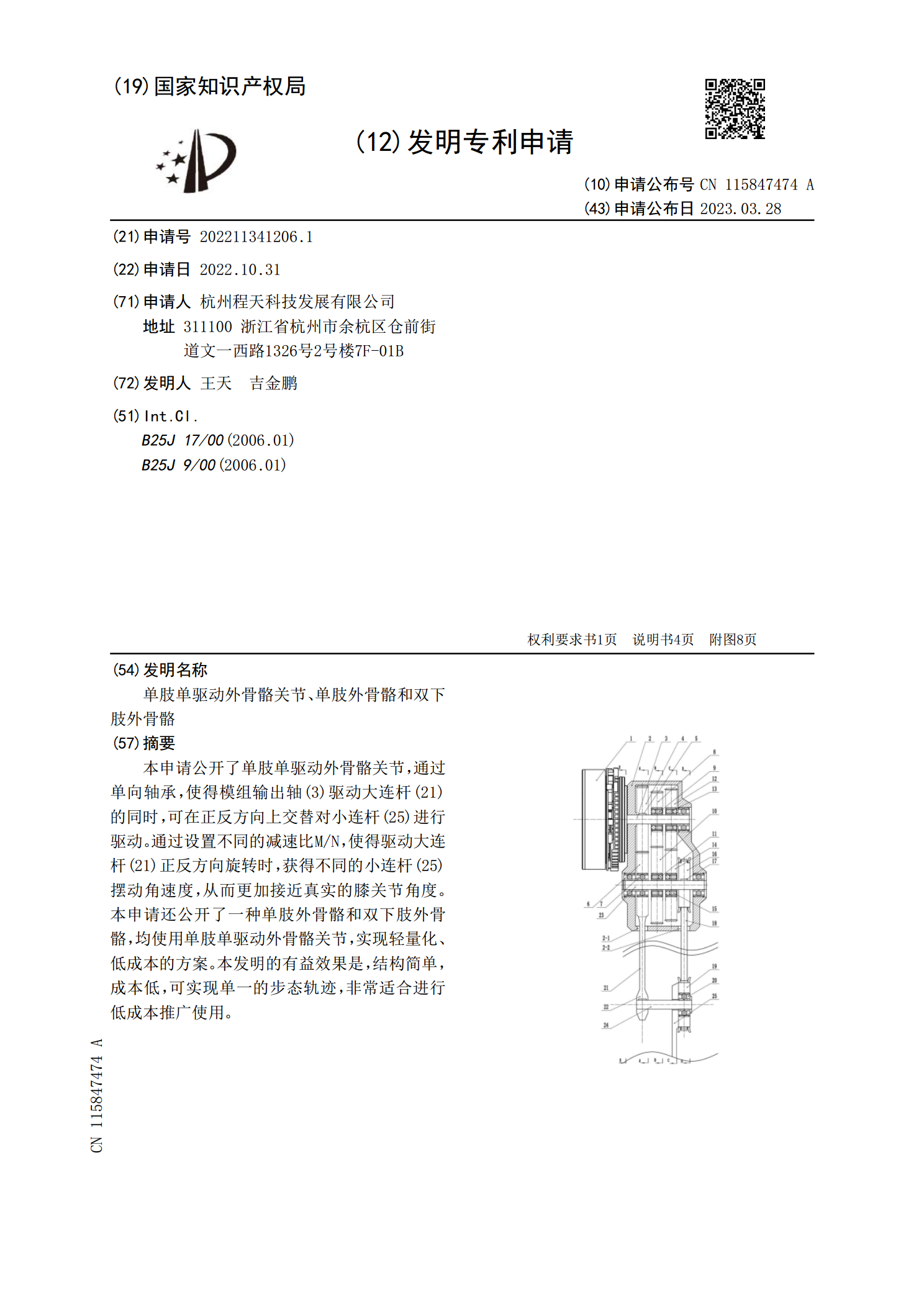
本申请公开了单肢单驱动外骨骼关节,通过单向轴承,使得模组输出轴(3)驱动大连杆(21)的同时,可在正反方向上交替对小连杆(25)进行驱动。通过设置不同的减速比M/N,使得驱动大连杆(21)正反方向旋转时,获得不同的小连杆(25)摆动角速度,从而更加接近真实的膝关节角度。本申请还公开了一种单肢外骨骼和双下肢外骨骼,均使用单肢单驱动外骨骼关节,实现轻量化、低成本的方案。本发明的有益效果是,结构简单,成本低,可实现单一的步态轨迹,非常适合进行低成本推广使用。
仿生关节和外骨骼机器人.pdf
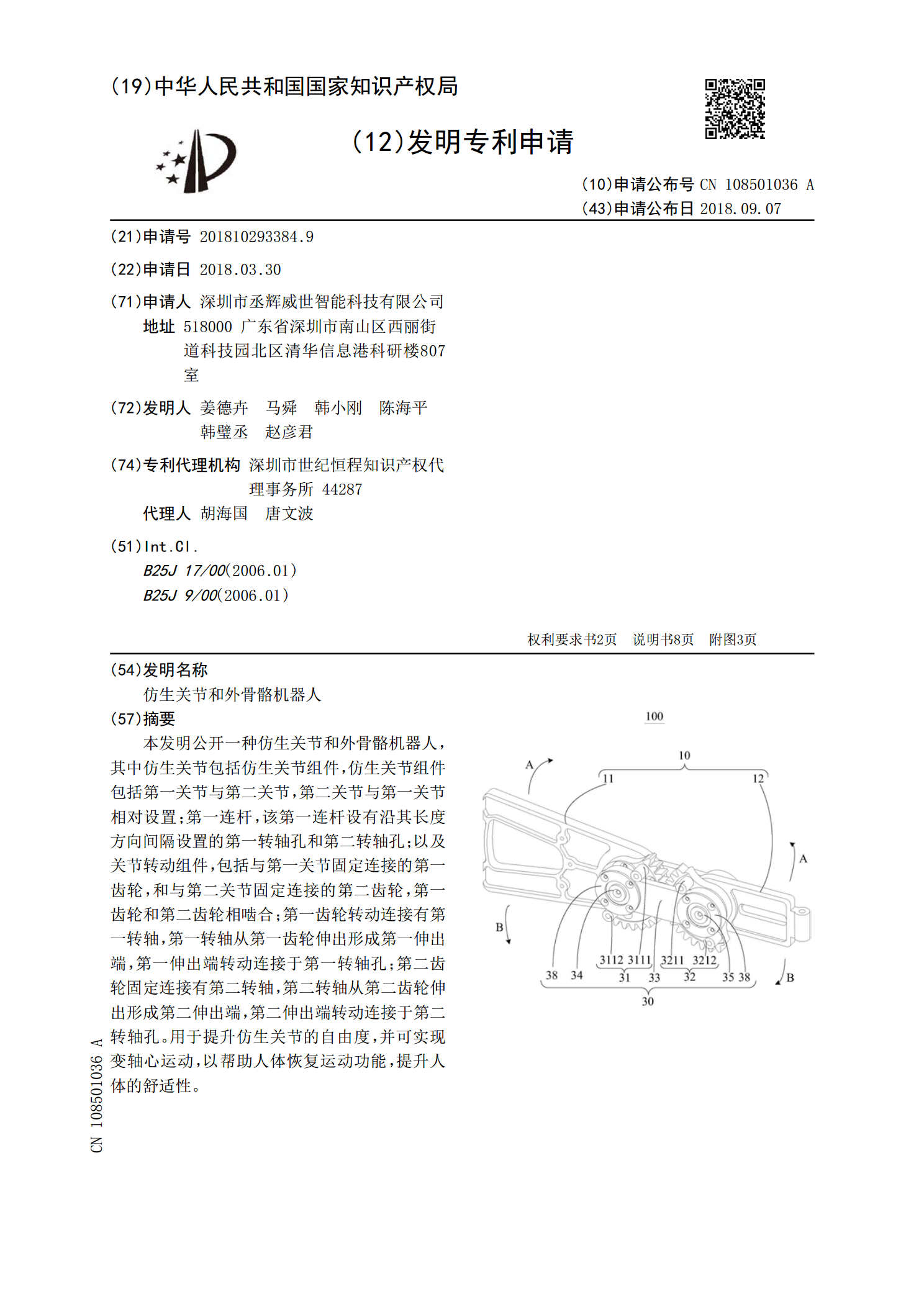
本发明公开一种仿生关节和外骨骼机器人,其中仿生关节包括仿生关节组件,仿生关节组件包括第一关节与第二关节,第二关节与第一关节相对设置;第一连杆,该第一连杆设有沿其长度方向间隔设置的第一转轴孔和第二转轴孔;以及关节转动组件,包括与第一关节固定连接的第一齿轮,和与第二关节固定连接的第二齿轮,第一齿轮和第二齿轮相啮合;第一齿轮转动连接有第一转轴,第一转轴从第一齿轮伸出形成第一伸出端,第一伸出端转动连接于第一转轴孔;第二齿轮固定连接有第二转轴,第二转轴从第二齿轮伸出形成第二伸出端,第二伸出端转动连接于第二转轴孔。用

外骨骼踝关节机器装置.pdf
本发明是一种包括齿轮传动和控制系统的便携式电动机驱动外骨骼踝关节机器装置,旨在为存在行走困难、肌肉无力或有关节问题的使用者在不同的速度和行走环境类型下提供步态辅助。
下肢外骨骼驱动器.pdf
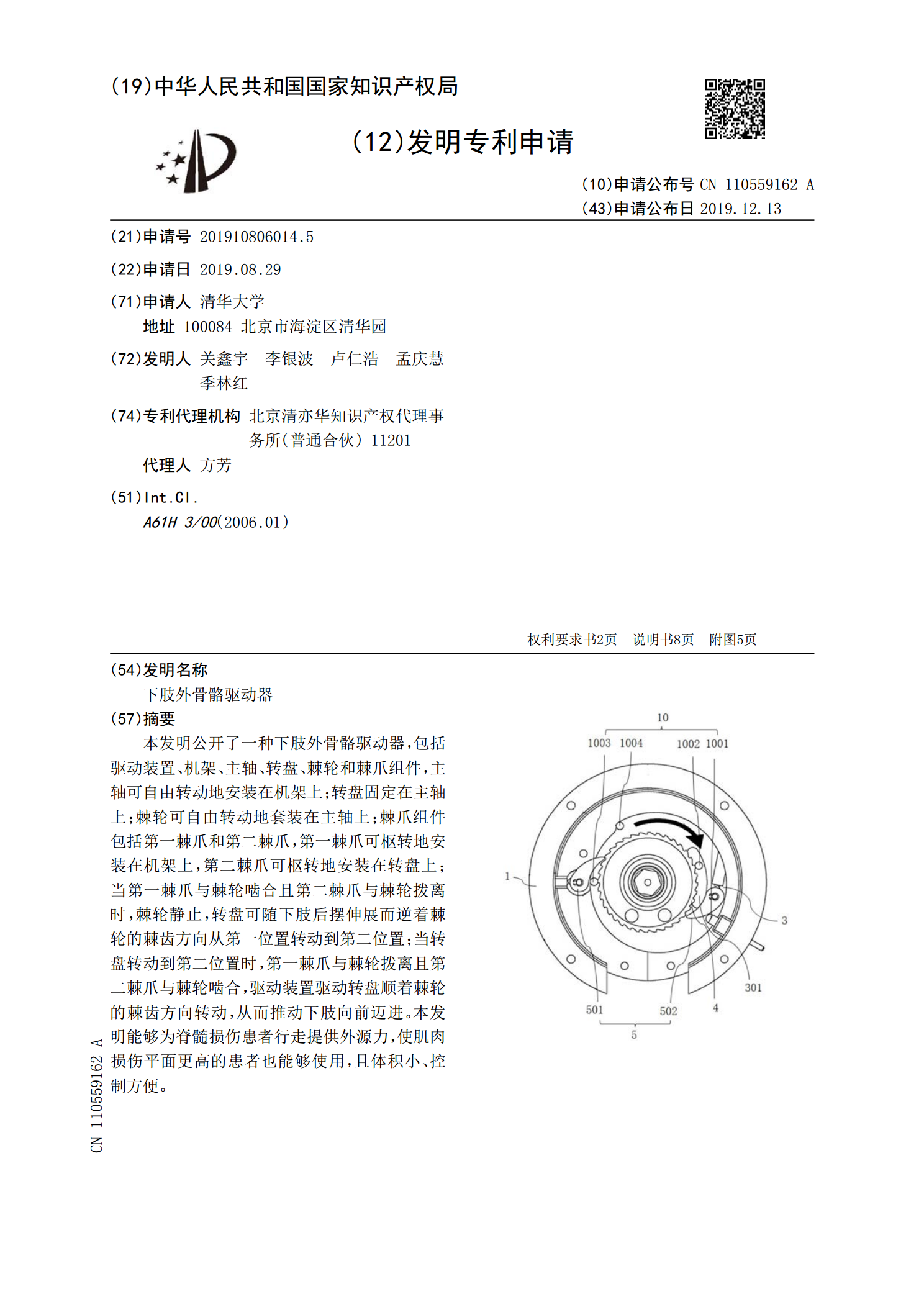
本发明公开了一种下肢外骨骼驱动器,包括驱动装置、机架、主轴、转盘、棘轮和棘爪组件,主轴可自由转动地安装在机架上;转盘固定在主轴上;棘轮可自由转动地套装在主轴上;棘爪组件包括第一棘爪和第二棘爪,第一棘爪可枢转地安装在机架上,第二棘爪可枢转地安装在转盘上;当第一棘爪与棘轮啮合且第二棘爪与棘轮拨离时,棘轮静止,转盘可随下肢后摆伸展而逆着棘轮的棘齿方向从第一位置转动到第二位置;当转盘转动到第二位置时,第一棘爪与棘轮拨离且第二棘爪与棘轮啮合,驱动装置驱动转盘顺着棘轮的棘齿方向转动,从而推动下肢向前迈进。本发明能够为
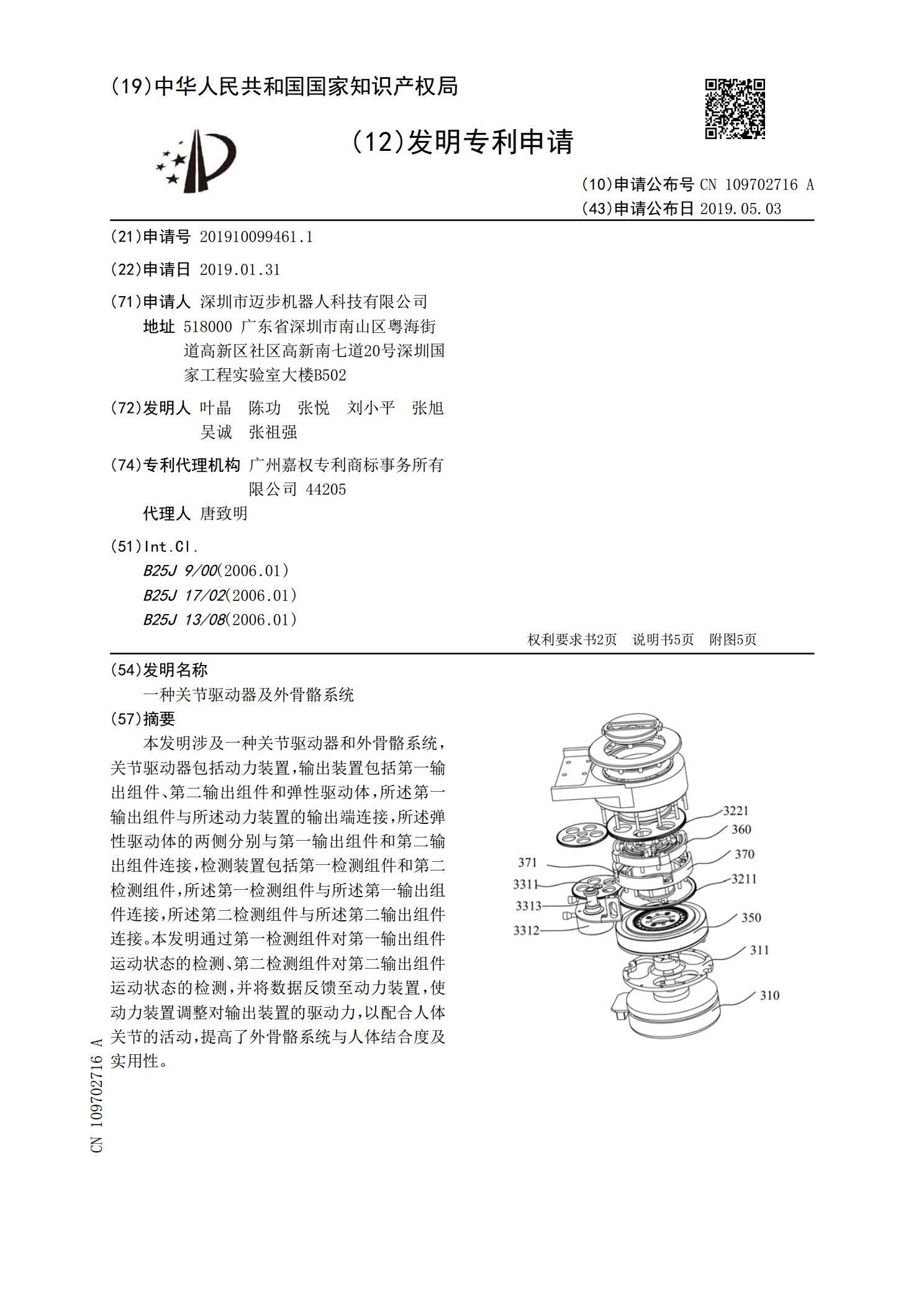
一种关节驱动器及外骨骼系统.pdf
本发明涉及一种关节驱动器和外骨骼系统,关节驱动器包括动力装置,输出装置包括第一输出组件、第二输出组件和弹性驱动体,所述第一输出组件与所述动力装置的输出端连接,所述弹性驱动体的两侧分别与第一输出组件和第二输出组件连接,检测装置包括第一检测组件和第二检测组件,所述第一检测组件与所述第一输出组件连接,所述第二检测组件与所述第二输出组件连接。本发明通过第一检测组件对第一输出组件运动状态的检测、第二检测组件对第二输出组件运动状态的检测,并将数据反馈至动力装置,使动力装置调整对输出装置的驱动力,以配合人体关节的活动,