
车辆及其线控转向系统前轮驱动控制方法、装置.pdf

努力****弘毅

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆及其线控转向系统前轮驱动控制方法、装置.pdf
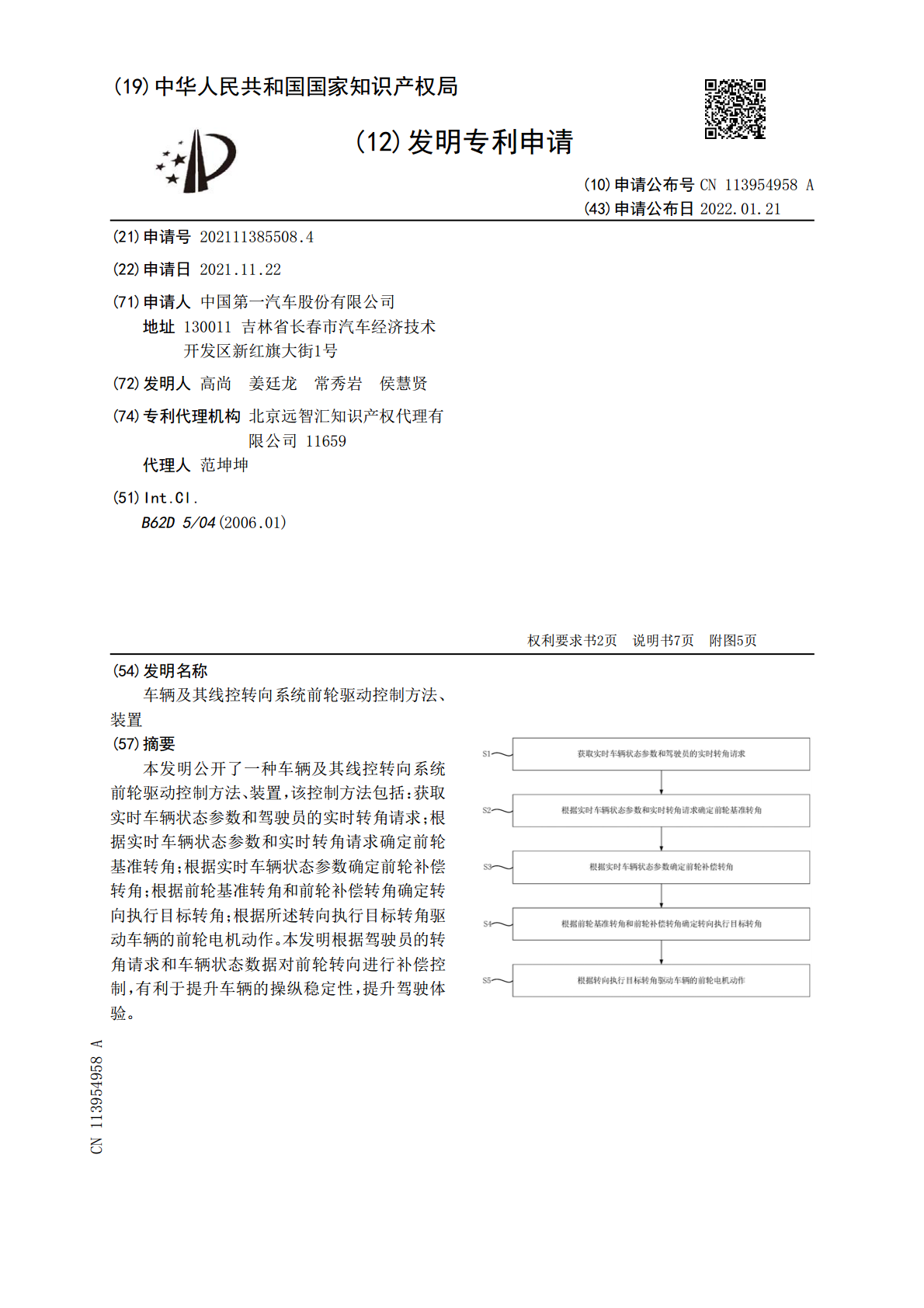
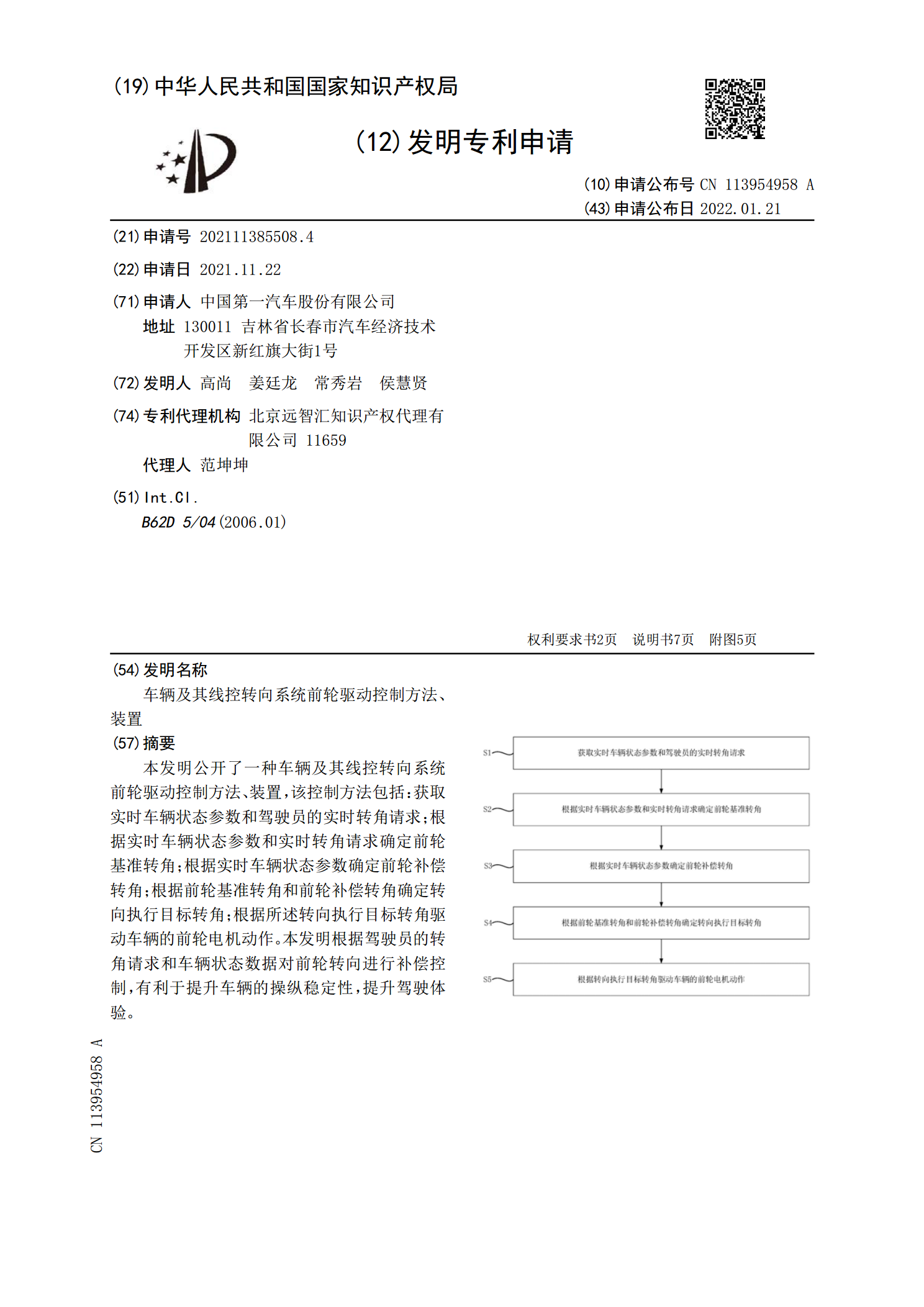
本发明公开了一种车辆及其线控转向系统前轮驱动控制方法、装置,该控制方法包括:获取实时车辆状态参数和驾驶员的实时转角请求;根据实时车辆状态参数和实时转角请求确定前轮基准转角;根据实时车辆状态参数确定前轮补偿转角;根据前轮基准转角和前轮补偿转角确定转向执行目标转角;根据所述转向执行目标转角驱动车辆的前轮电机动作。本发明根据驾驶员的转角请求和车辆状态数据对前轮转向进行补偿控制,有利于提升车辆的操纵稳定性,提升驾驶体验。
车辆及其线控转向控制系统、方法.pdf
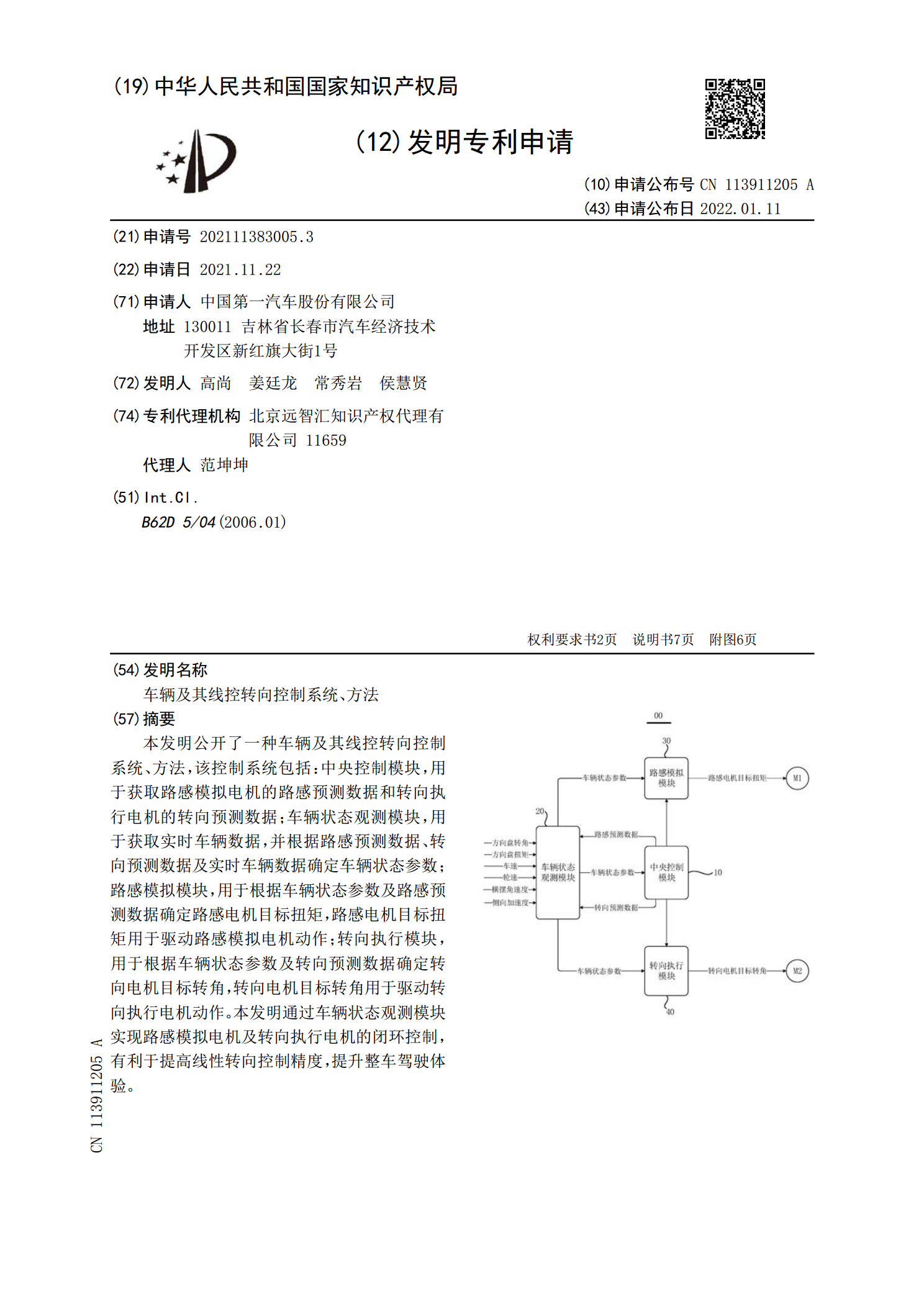
本发明公开了一种车辆及其线控转向控制系统、方法,该控制系统包括:中央控制模块,用于获取路感模拟电机的路感预测数据和转向执行电机的转向预测数据;车辆状态观测模块,用于获取实时车辆数据,并根据路感预测数据、转向预测数据及实时车辆数据确定车辆状态参数;路感模拟模块,用于根据车辆状态参数及路感预测数据确定路感电机目标扭矩,路感电机目标扭矩用于驱动路感模拟电机动作;转向执行模块,用于根据车辆状态参数及转向预测数据确定转向电机目标转角,转向电机目标转角用于驱动转向执行电机动作。本发明通过车辆状态观测模块实现路感模拟电
基于线控转向系统的车辆转向模式控制方法和装置.pdf
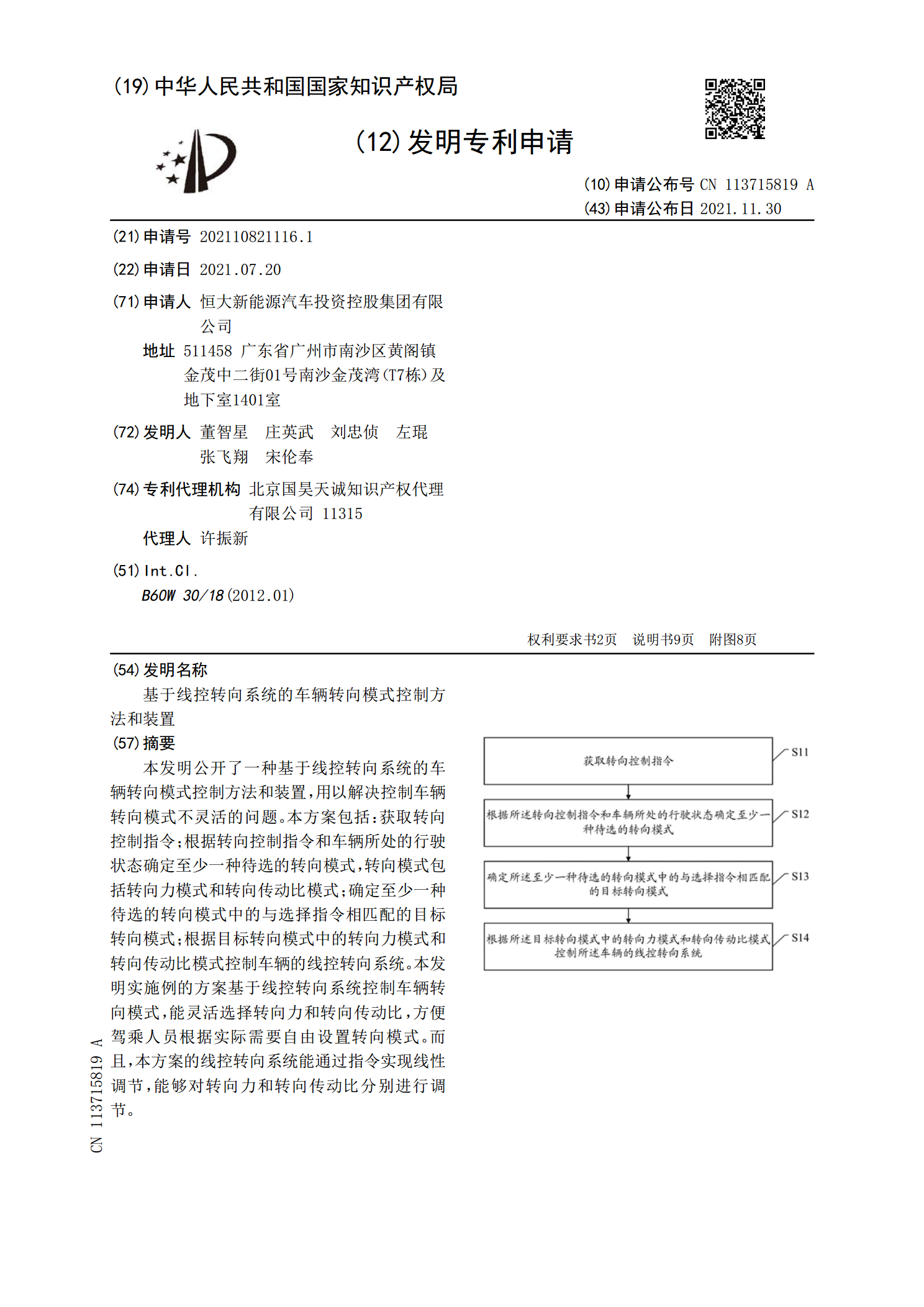
本发明公开了一种基于线控转向系统的车辆转向模式控制方法和装置,用以解决控制车辆转向模式不灵活的问题。本方案包括:获取转向控制指令;根据转向控制指令和车辆所处的行驶状态确定至少一种待选的转向模式,转向模式包括转向力模式和转向传动比模式;确定至少一种待选的转向模式中的与选择指令相匹配的目标转向模式;根据目标转向模式中的转向力模式和转向传动比模式控制车辆的线控转向系统。本发明实施例的方案基于线控转向系统控制车辆转向模式,能灵活选择转向力和转向传动比,方便驾乘人员根据实际需要自由设置转向模式。而且,本方案的线控转
车辆及其线控转向变传动比控制方法、装置.pdf
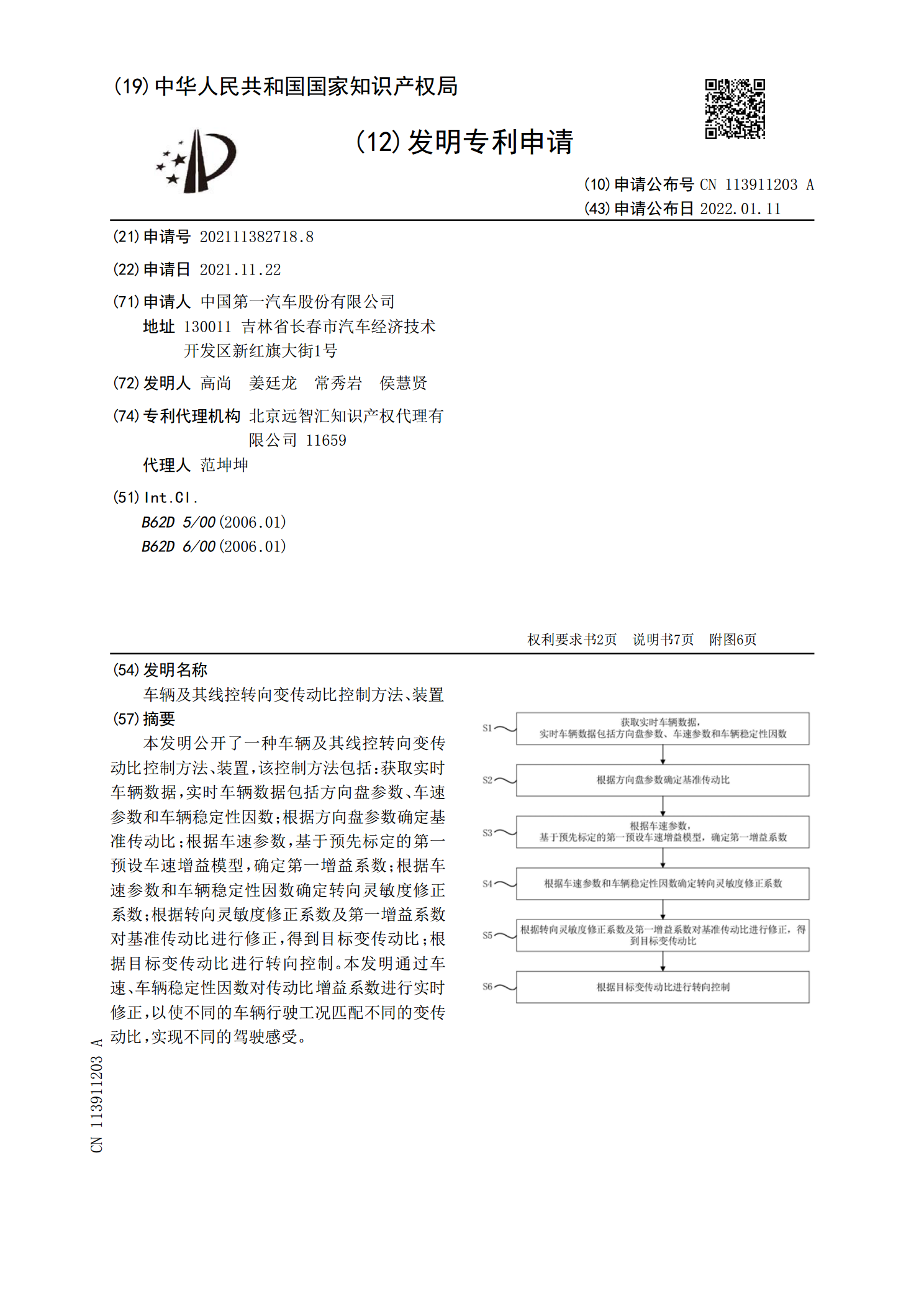
本发明公开了一种车辆及其线控转向变传动比控制方法、装置,该控制方法包括:获取实时车辆数据,实时车辆数据包括方向盘参数、车速参数和车辆稳定性因数;根据方向盘参数确定基准传动比;根据车速参数,基于预先标定的第一预设车速增益模型,确定第一增益系数;根据车速参数和车辆稳定性因数确定转向灵敏度修正系数;根据转向灵敏度修正系数及第一增益系数对基准传动比进行修正,得到目标变传动比;根据目标变传动比进行转向控制。本发明通过车速、车辆稳定性因数对传动比增益系数进行实时修正,以使不同的车辆行驶工况匹配不同的变传动比,实现不同
线控转向系统的转向控制装置和方法.pdf
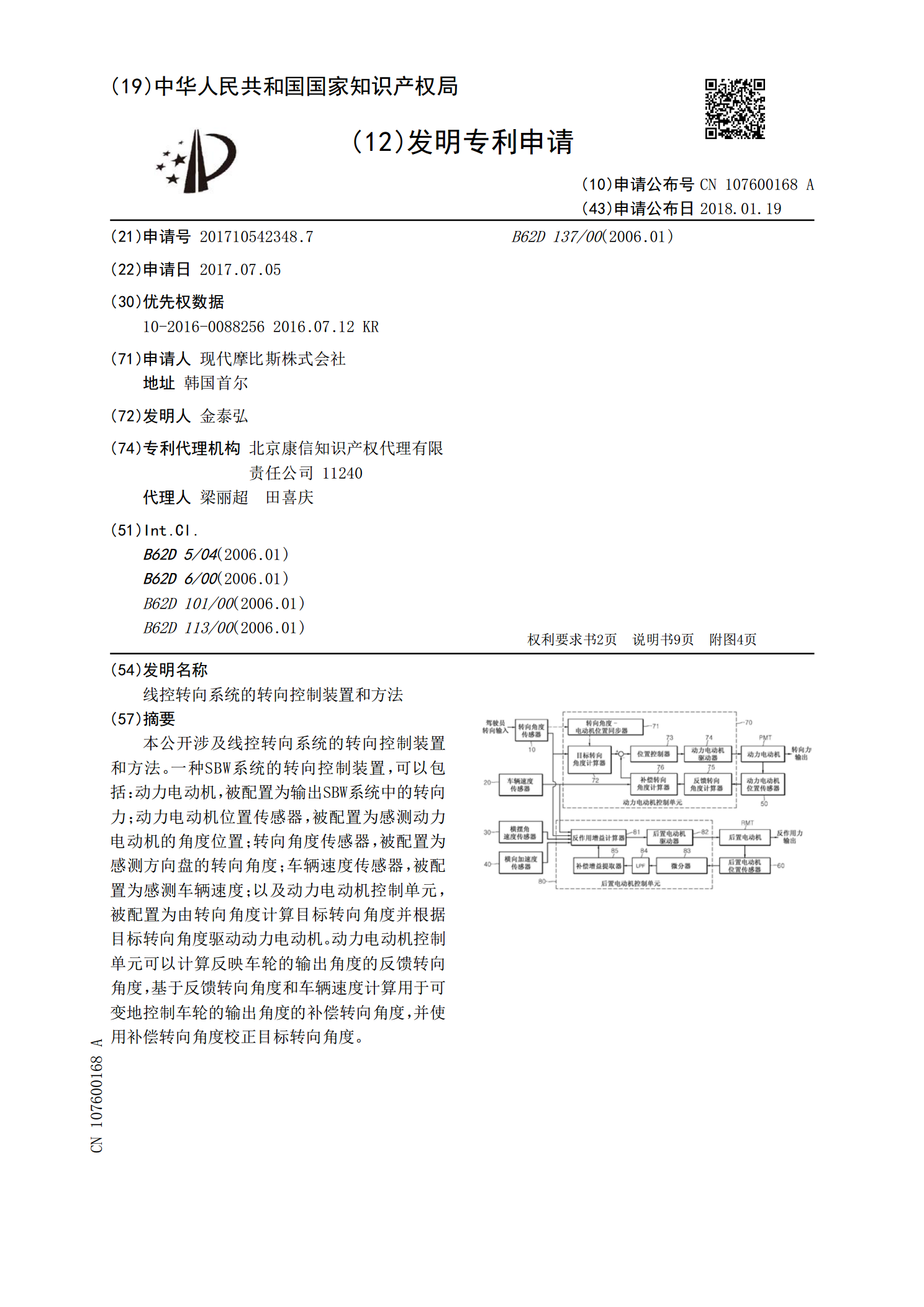
本公开涉及线控转向系统的转向控制装置和方法。一种SBW系统的转向控制装置,可以包括:动力电动机,被配置为输出SBW系统中的转向力;动力电动机位置传感器,被配置为感测动力电动机的角度位置;转向角度传感器,被配置为感测方向盘的转向角度;车辆速度传感器,被配置为感测车辆速度;以及动力电动机控制单元,被配置为由转向角度计算目标转向角度并根据目标转向角度驱动动力电动机。动力电动机控制单元可以计算反映车轮的输出角度的反馈转向角度,基于反馈转向角度和车辆速度计算用于可变地控制车轮的输出角度的补偿转向角度,并使用补偿转向