
一种机器人底盘悬挂系统及机器人.pdf

是你****韵呀

1/8
2/8

3/8

4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人底盘悬挂系统及机器人.pdf
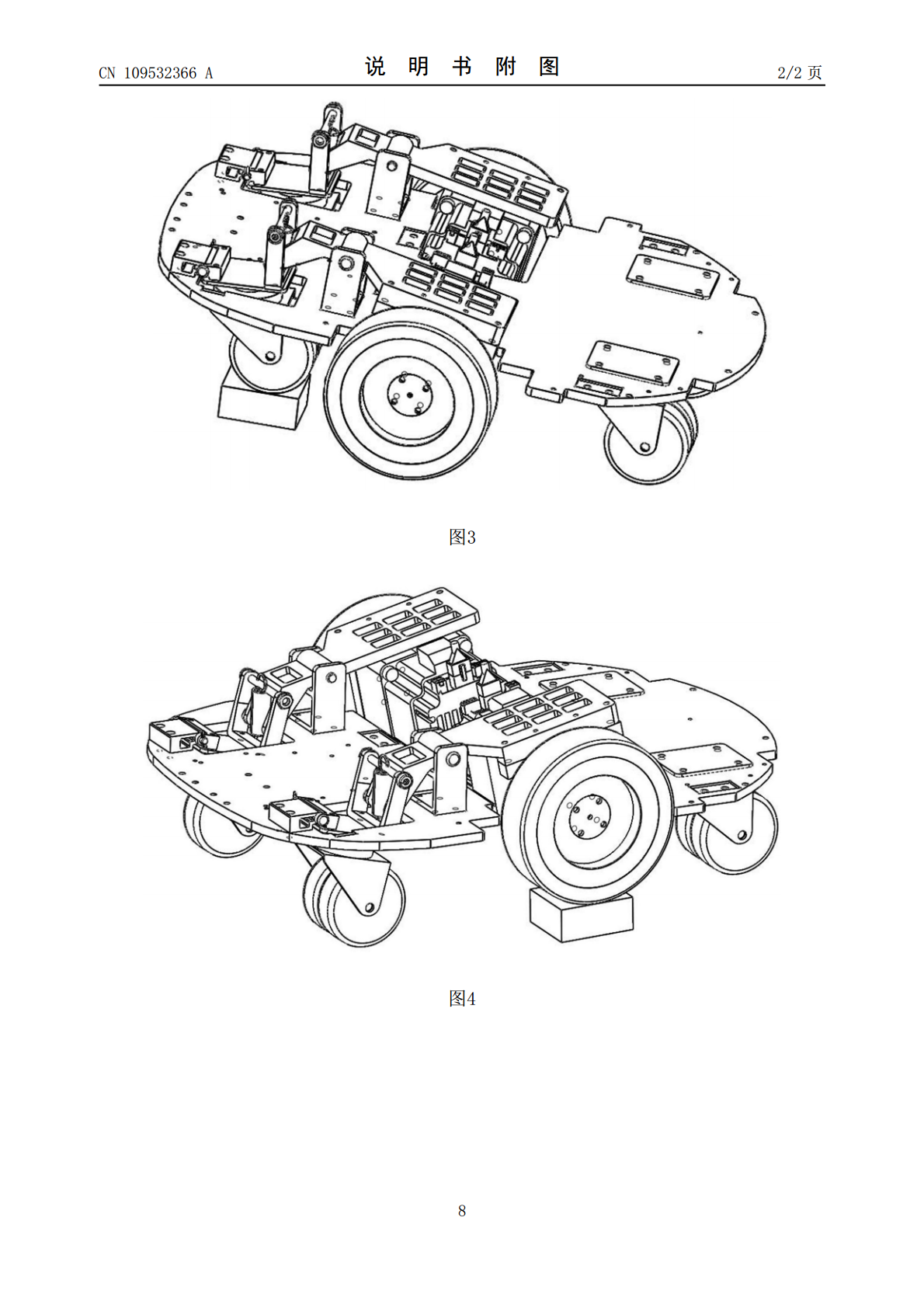
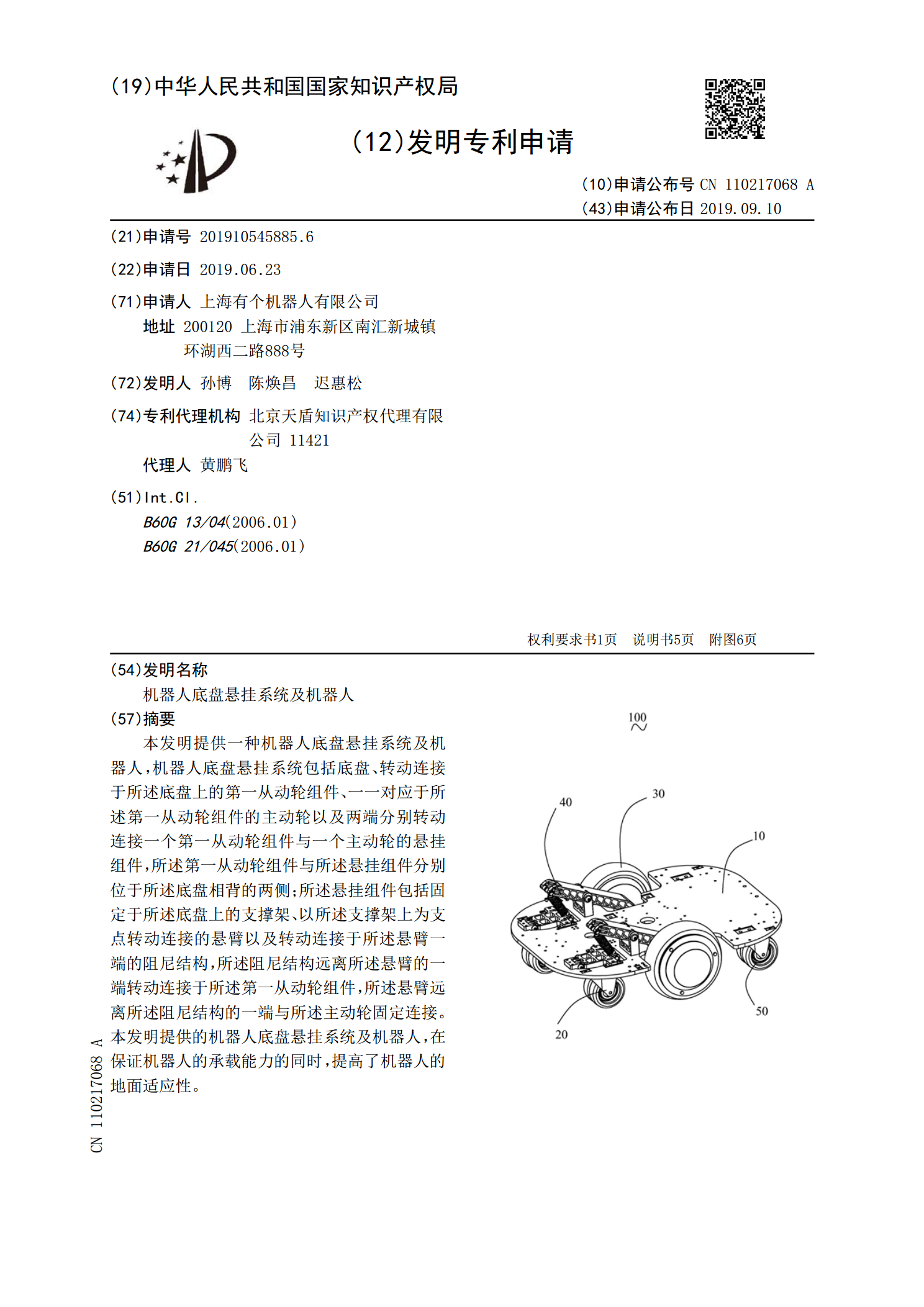
本发明提供一种机器人底盘悬挂系统及机器人,机器人底盘悬挂系统包括底盘、转动连接于所述底盘上的第一从动轮组件、一一对应于所述第一从动轮组件的主动轮以及两端分别转动连接一个第一从动轮组件与一个主动轮的悬挂组件,所述第一从动轮组件与所述悬挂组件分别位于所述底盘相背的两侧;所述悬挂组件包括固定于所述底盘上的支撑架、以所述支撑架上为支点转动连接的悬臂以及转动连接于所述悬臂一端的阻尼结构,所述阻尼结构远离所述悬臂的一端转动连接于所述第一从动轮组件,所述悬臂远离所述阻尼结构的一端与所述主动轮固定连接。本发明提供的机器人
机器人的底盘悬挂系统.pdf
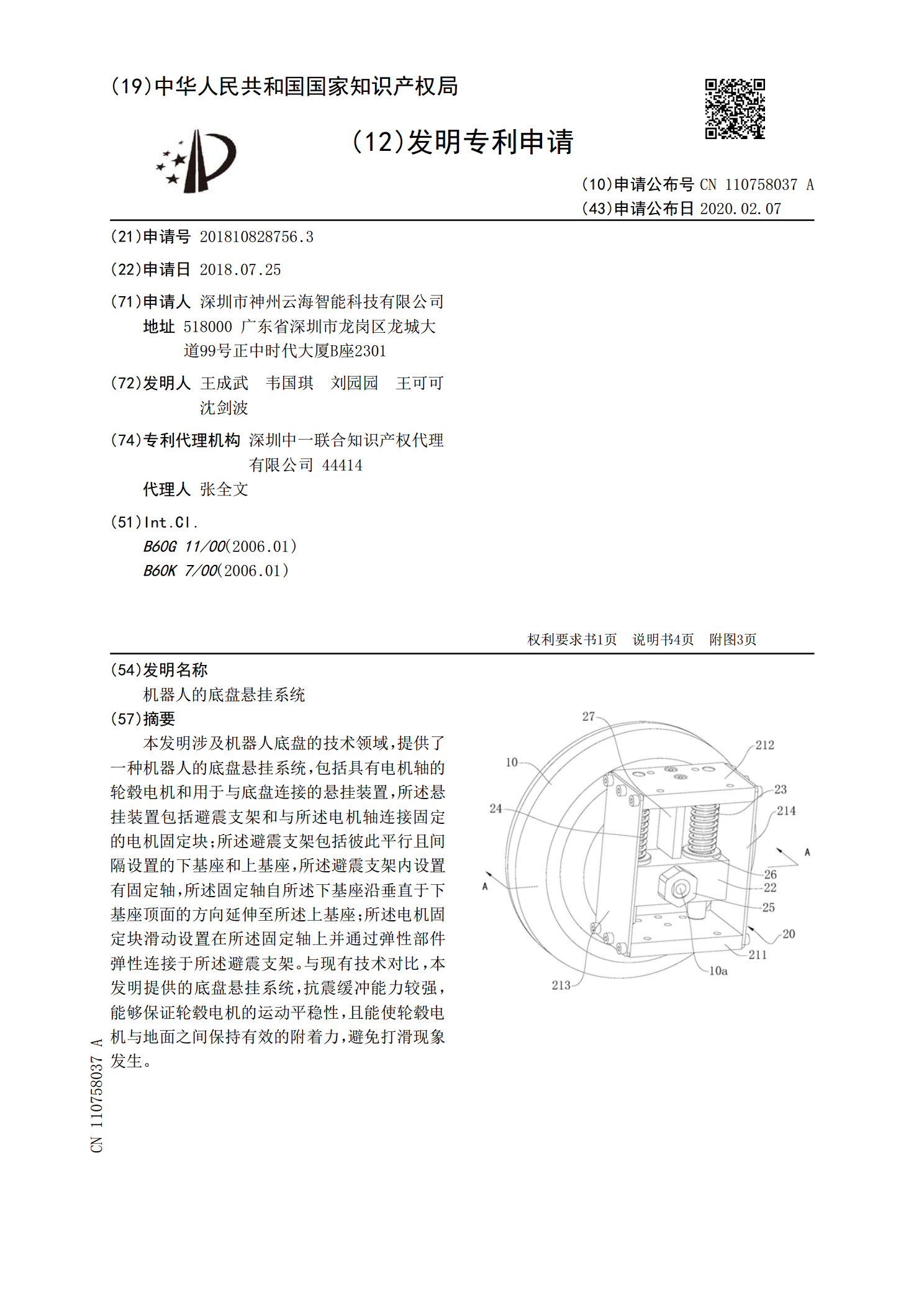
本发明涉及机器人底盘的技术领域,提供了一种机器人的底盘悬挂系统,包括具有电机轴的轮毂电机和用于与底盘连接的悬挂装置,所述悬挂装置包括避震支架和与所述电机轴连接固定的电机固定块;所述避震支架包括彼此平行且间隔设置的下基座和上基座,所述避震支架内设置有固定轴,所述固定轴自所述下基座沿垂直于下基座顶面的方向延伸至所述上基座;所述电机固定块滑动设置在所述固定轴上并通过弹性部件弹性连接于所述避震支架。与现有技术对比,本发明提供的底盘悬挂系统,抗震缓冲能力较强,能够保证轮毂电机的运动平稳性,且能使轮毂电机与地面之间保
一种机器人底盘悬挂系统及机器人.pdf
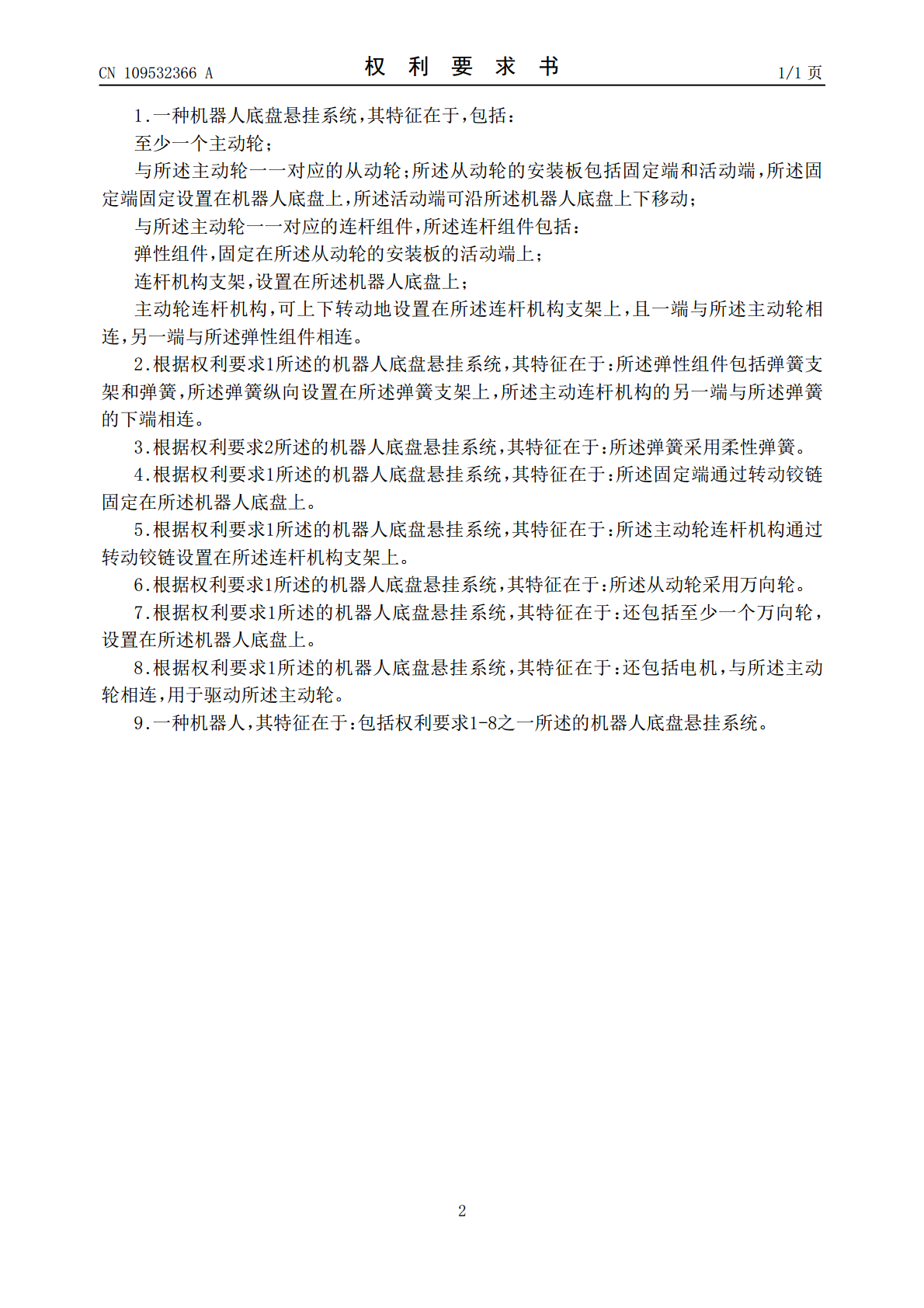
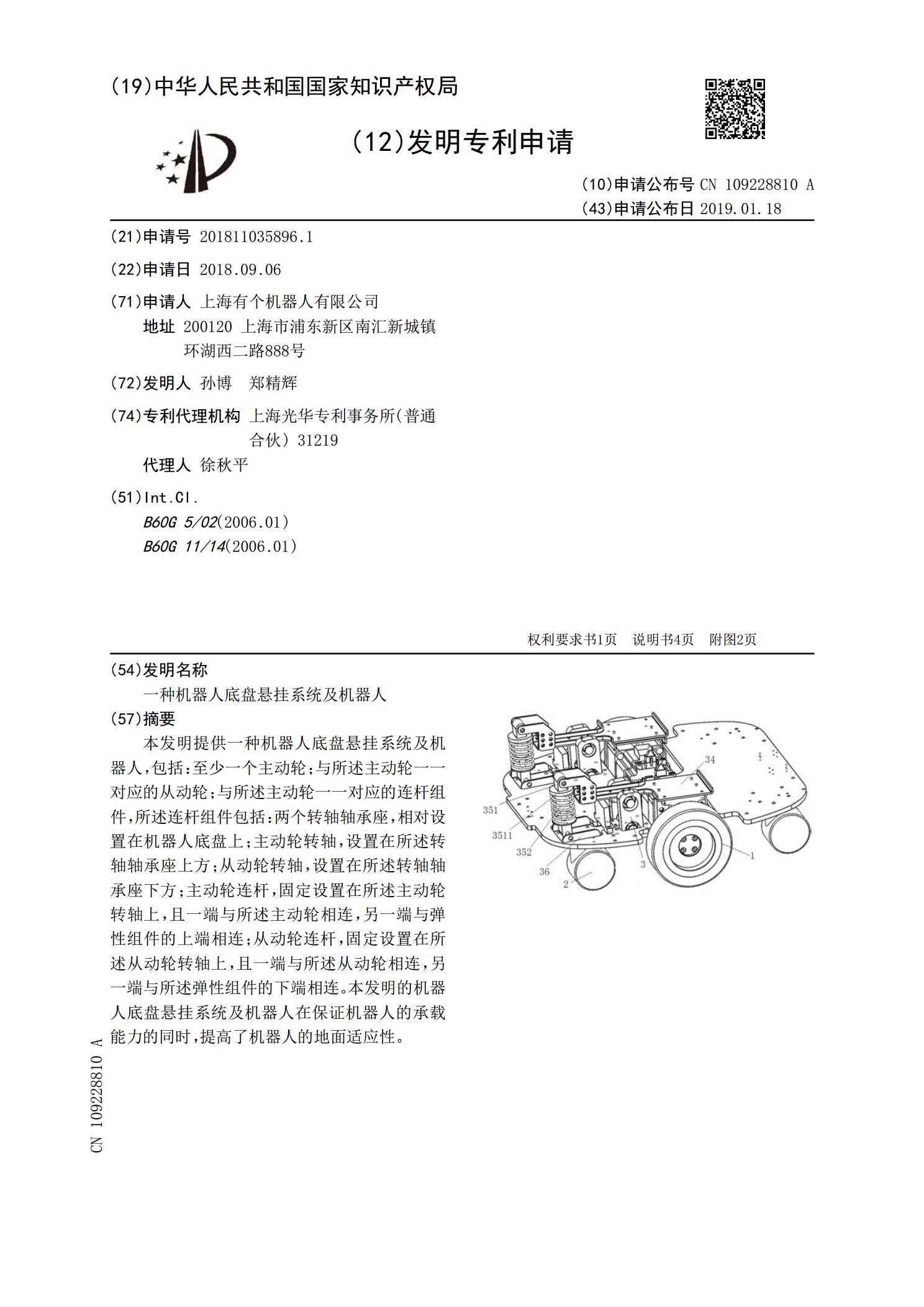
本发明提供一种机器人底盘悬挂系统及机器人,包括:至少一个主动轮;与所述主动轮一一对应的从动轮;与所述主动轮一一对应的连杆组件,所述连杆组件包括:两个转轴轴承座,相对设置在机器人底盘上;主动轮转轴,设置在所述转轴轴承座上方;从动轮转轴,设置在所述转轴轴承座下方;主动轮连杆,固定设置在所述主动轮转轴上,且一端与所述主动轮相连,另一端与弹性组件的上端相连;从动轮连杆,固定设置在所述从动轮转轴上,且一端与所述从动轮相连,另一端与所述弹性组件的下端相连。本发明的机器人底盘悬挂系统及机器人在保证机器人的承载能力的同时
一种机器人底盘悬挂系统及机器人.pdf
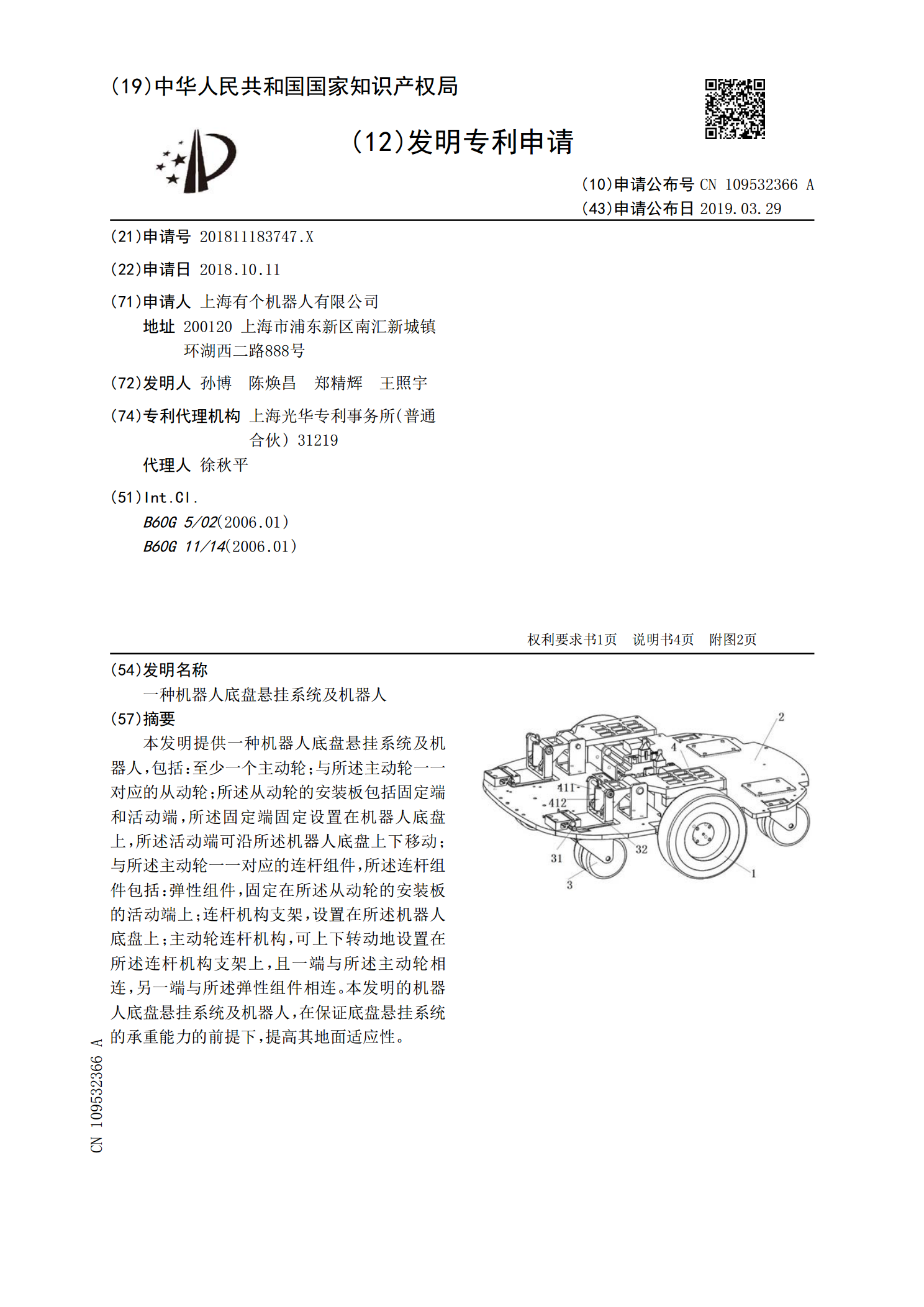
本发明提供一种机器人底盘悬挂系统及机器人,包括:至少一个主动轮;与所述主动轮一一对应的从动轮;所述从动轮的安装板包括固定端和活动端,所述固定端固定设置在机器人底盘上,所述活动端可沿所述机器人底盘上下移动;与所述主动轮一一对应的连杆组件,所述连杆组件包括:弹性组件,固定在所述从动轮的安装板的活动端上;连杆机构支架,设置在所述机器人底盘上;主动轮连杆机构,可上下转动地设置在所述连杆机构支架上,且一端与所述主动轮相连,另一端与所述弹性组件相连。本发明的机器人底盘悬挂系统及机器人,在保证底盘悬挂系统的承重能力的前
一种服务机器人底盘悬挂系统.pdf
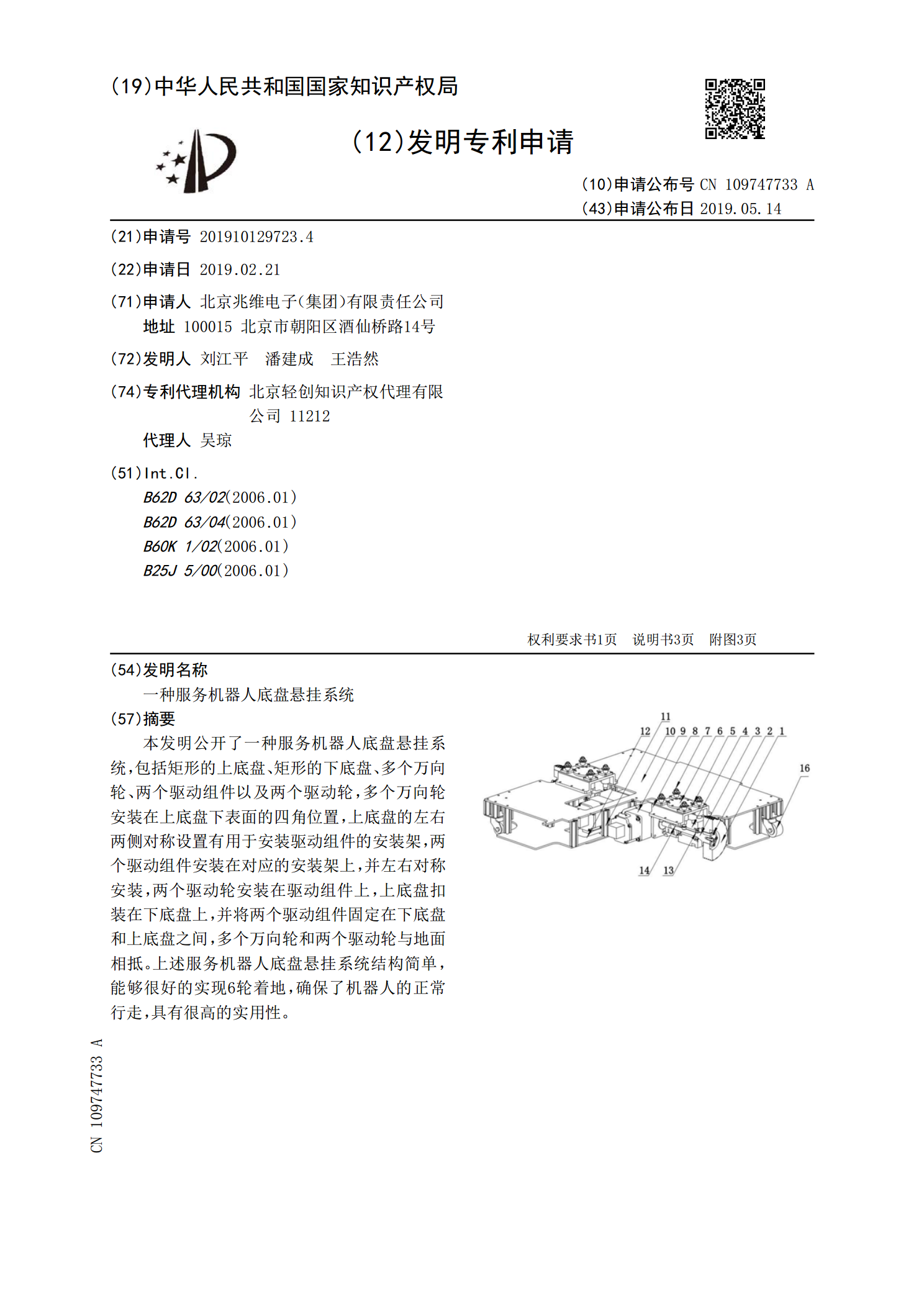
本发明公开了一种服务机器人底盘悬挂系统,包括矩形的上底盘、矩形的下底盘、多个万向轮、两个驱动组件以及两个驱动轮,多个万向轮安装在上底盘下表面的四角位置,上底盘的左右两侧对称设置有用于安装驱动组件的安装架,两个驱动组件安装在对应的安装架上,并左右对称安装,两个驱动轮安装在驱动组件上,上底盘扣装在下底盘上,并将两个驱动组件固定在下底盘和上底盘之间,多个万向轮和两个驱动轮与地面相抵。上述服务机器人底盘悬挂系统结构简单,能够很好的实现6轮着地,确保了机器人的正常行走,具有很高的实用性。