
一种车载地铁限界检测方法及其检测系统.pdf

努力****星驰


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载地铁限界检测方法及其检测系统.pdf
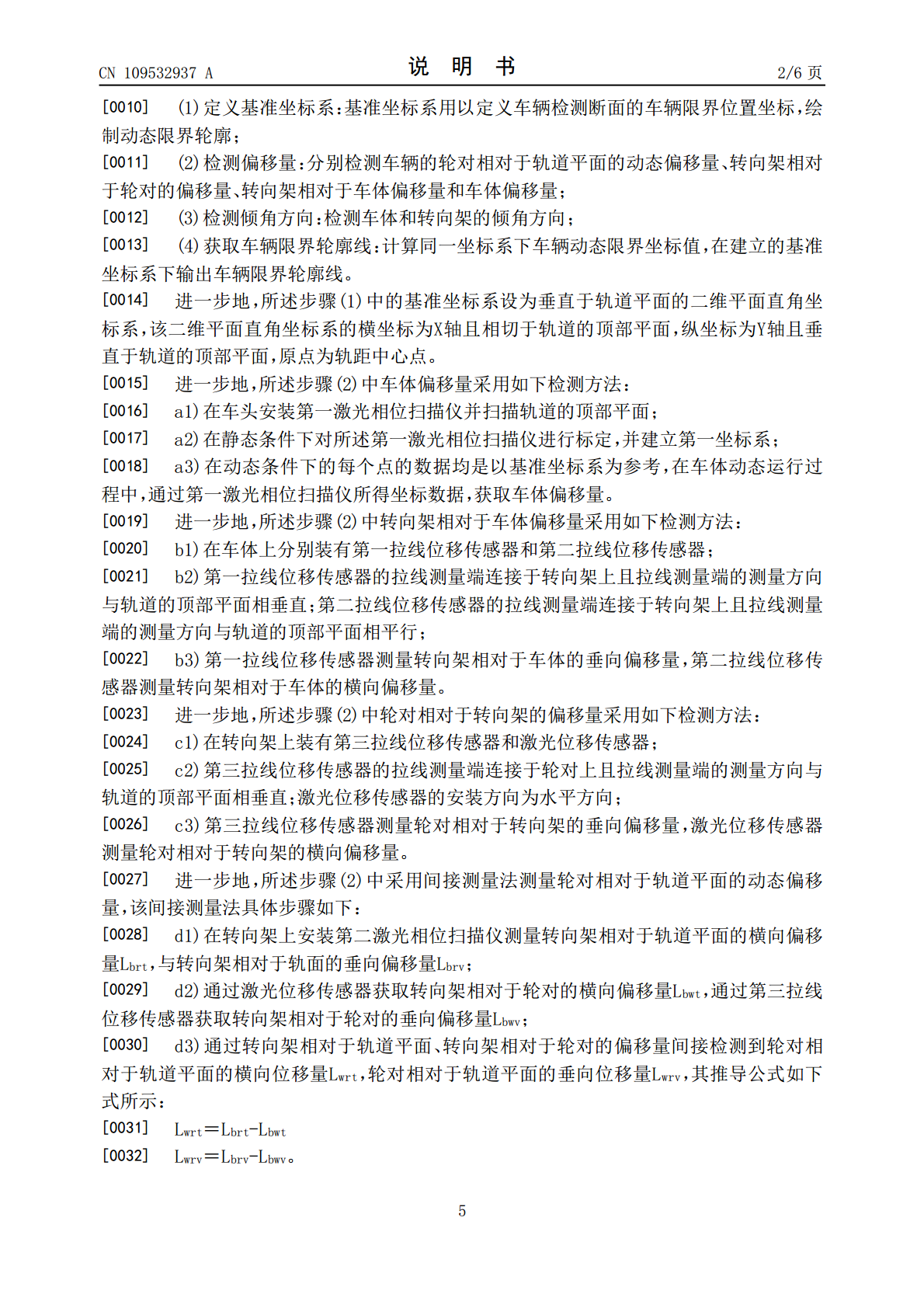
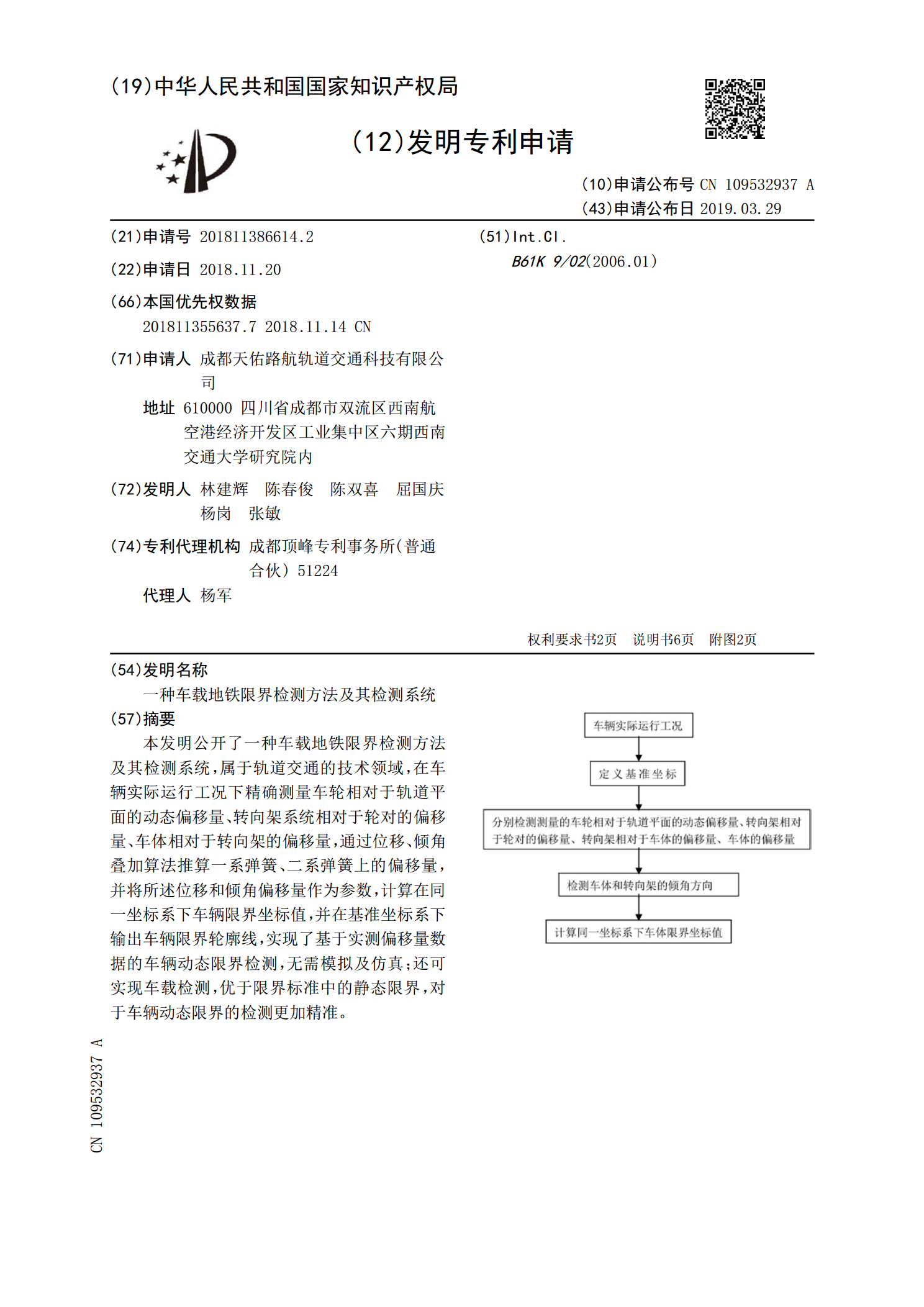
本发明公开了一种车载地铁限界检测方法及其检测系统,属于轨道交通的技术领域,在车辆实际运行工况下精确测量车轮相对于轨道平面的动态偏移量、转向架系统相对于轮对的偏移量、车体相对于转向架的偏移量,通过位移、倾角叠加算法推算一系弹簧、二系弹簧上的偏移量,并将所述位移和倾角偏移量作为参数,计算在同一坐标系下车辆限界坐标值,并在基准坐标系下输出车辆限界轮廓线,实现了基于实测偏移量数据的车辆动态限界检测,无需模拟及仿真;还可实现车载检测,优于限界标准中的静态限界,对于车辆动态限界的检测更加精准。

地铁车辆限界检测方法和系统.pdf
本发明公开了一种地铁车辆限界检测方法和系统。该方法包括:在车辆通过转换轨的过程中,获取所述车辆的多个局部的三维轮廓图像和所述车辆的第一标识信息;对所述车辆的多个局部的三维轮廓图像进行处理,得到所述车辆的完整三维轮廓图像;按照所述车辆的第一标识信息、预设的限界标准图像库和所述车辆的完整三维轮廓图像,确定所述车辆的限界判断结果;将所述车辆的限界判断结果发送至自动列车监控ATS模块。本发明提供的地铁车辆限界检测方法和系统,提高了地铁车辆限界检测的效率,且实现了车辆限界检测的自动化。

一种地铁限界动态检测车及检测方法.pdf
本发明提供一种地铁限界动态检测车及检测方法,主要解决现有检测定位不准确、效率慢、检测成本高的技术问题。本发明检测车包括车体,车体为三轮T字型铝合金箱体结构,所述车体包括右主箱体、支座、左主箱体、右侧副箱体,右主箱体和左主箱体通过支座固定连接,支座内装有RFID读卡器且读写端朝正下方,左主箱体外侧安装一个行驶轮,右侧副箱体两端外侧安装两个行驶轮,每个行驶轮与一个光电旋转编码器通过轴承套相连,所述支座上装有二维激光断面仪,所述右主箱体上固定有计算机操作台支杆、计算机操作台及计算机,右主箱体内嵌装蓄电池,蓄电池

一种地铁隧道限界检测方法.pdf
本发明公开了一种地铁隧道限界检测方法,解决了目前对于隧道侵界的检测效率低、成本高的弊端,其技术方案要点是通过三维激光扫描检测装置扫描获取隧道断面点云,生成断面点云图的外接矩形框,将矩形框内的断面点云转换成断面图像;标记断面图像中隧道特征点以获得样本集;搭建基于卷积神经网络的回归模型,通过标记获得的样本集对回归模型进行训练、测试,再通过回归模型进行预测;获取轨道车的轮廓线,识别特征点以统一轨道车坐标与断面点云坐标并叠加,基于回归模型对轨道车在隧道内是否侵界进行判断,本发明的一种地铁隧道限界检测方法,能通过模
一种可视化地铁限界检测系统.pdf
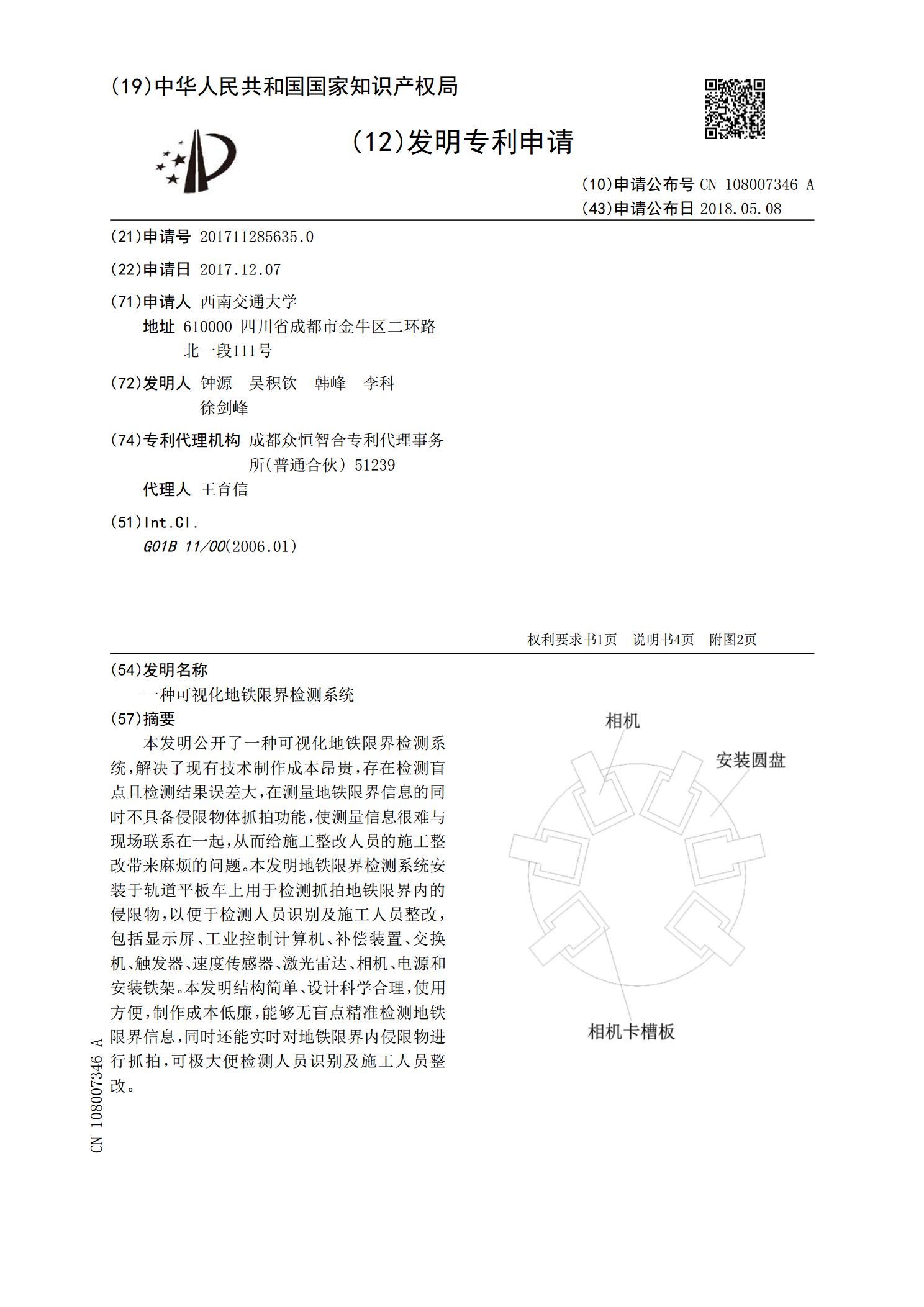
本发明公开了一种可视化地铁限界检测系统,解决了现有技术制作成本昂贵,存在检测盲点且检测结果误差大,在测量地铁限界信息的同时不具备侵限物体抓拍功能,使测量信息很难与现场联系在一起,从而给施工整改人员的施工整改带来麻烦的问题。本发明地铁限界检测系统安装于轨道平板车上用于检测抓拍地铁限界内的侵限物,以便于检测人员识别及施工人员整改,包括显示屏、工业控制计算机、补偿装置、交换机、触发器、速度传感器、激光雷达、相机、电源和安装铁架。本发明结构简单、设计科学合理,使用方便,制作成本低廉,能够无盲点精准检测地铁限界信息