
一种应用于清洁机器人的轮胎和清洁机器人.pdf

一条****轩吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种应用于清洁机器人的轮胎和清洁机器人.pdf
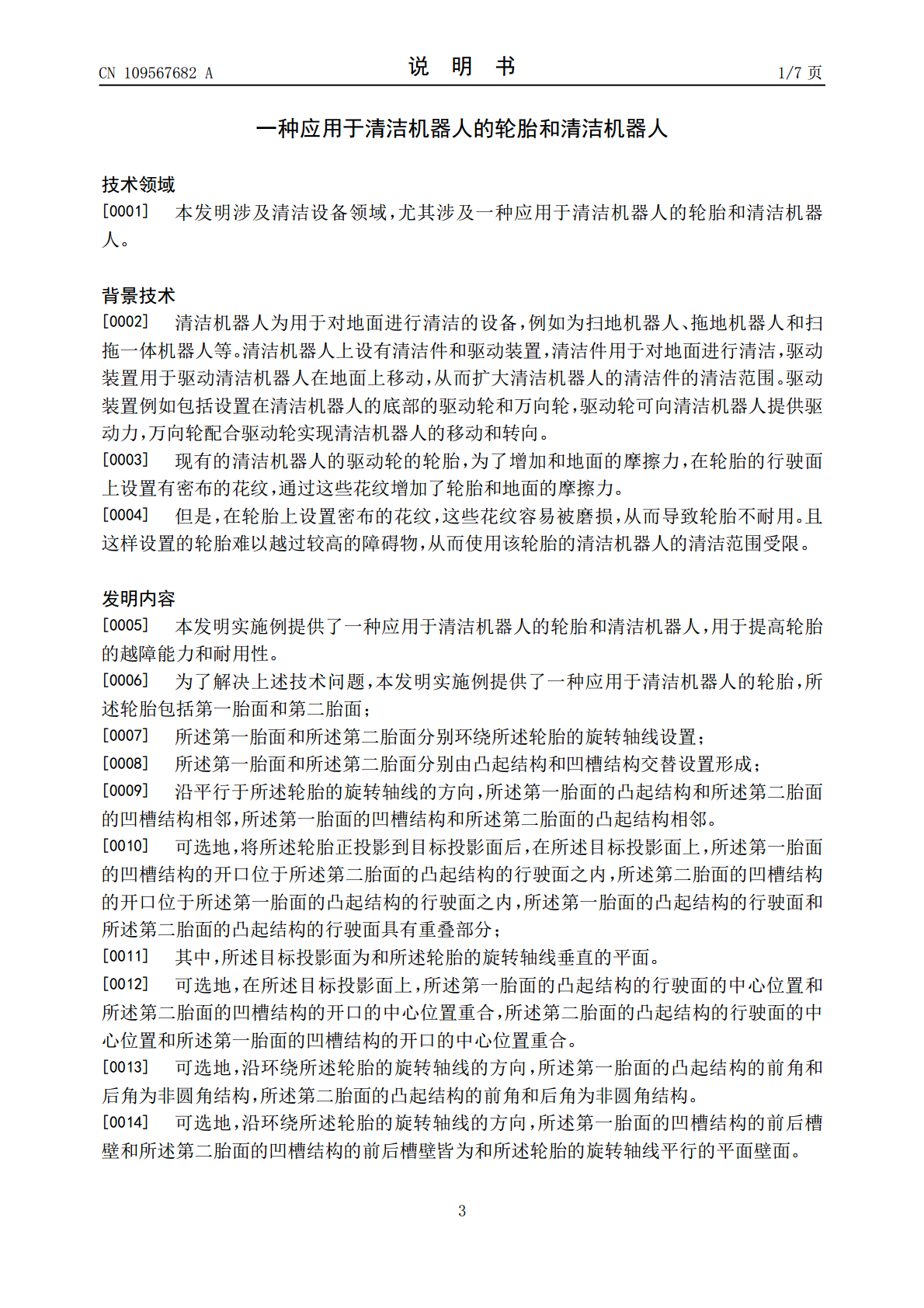
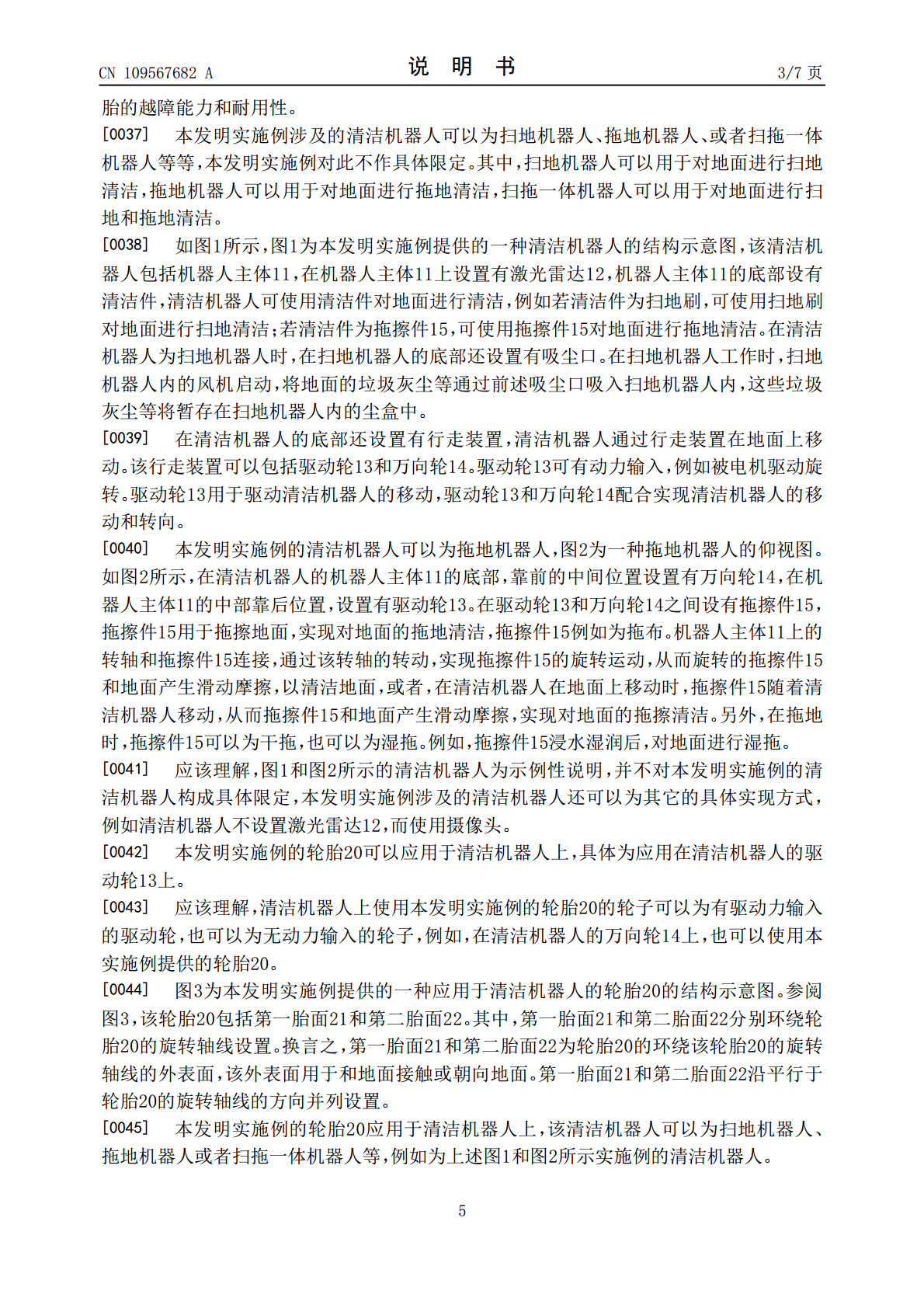
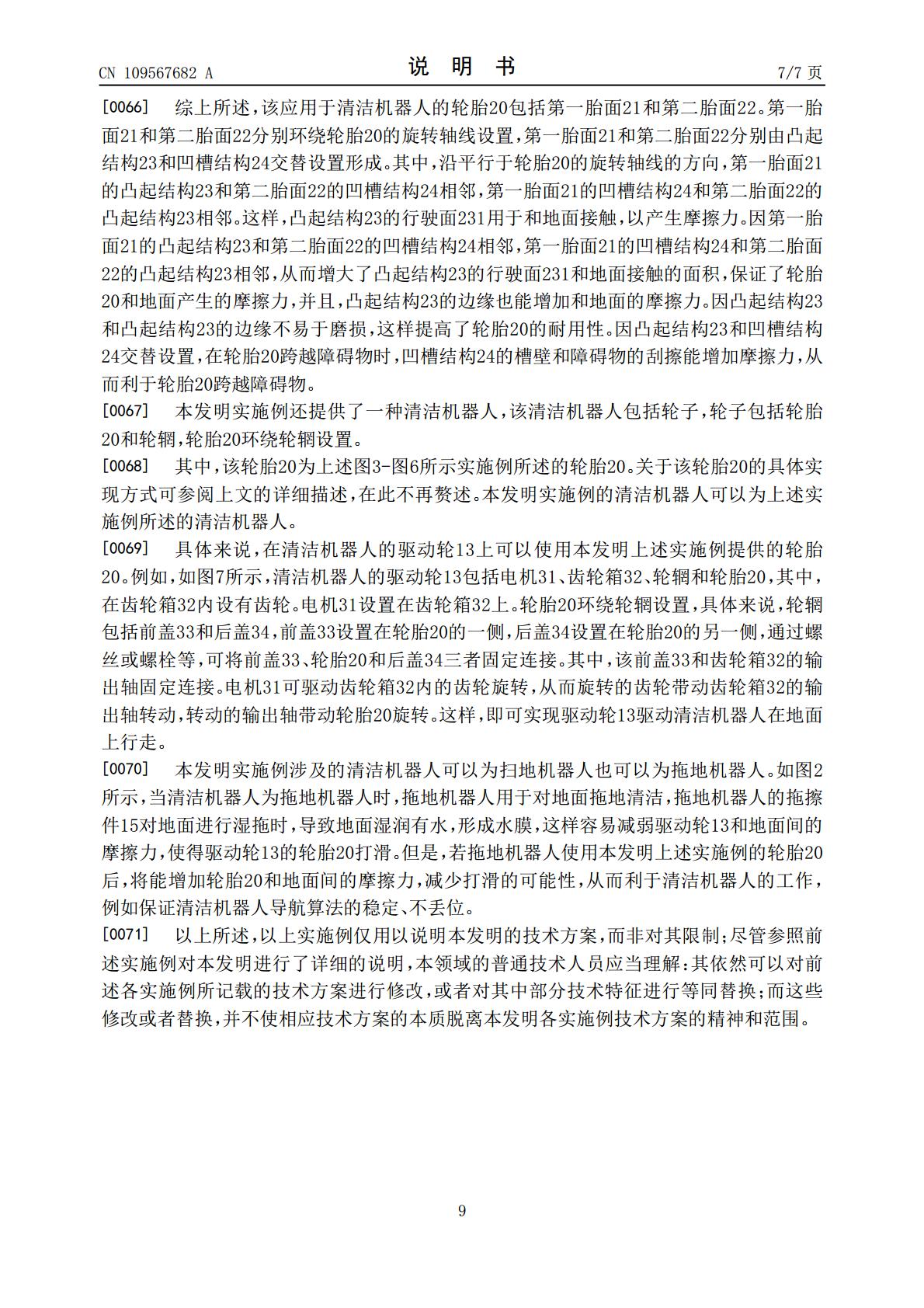
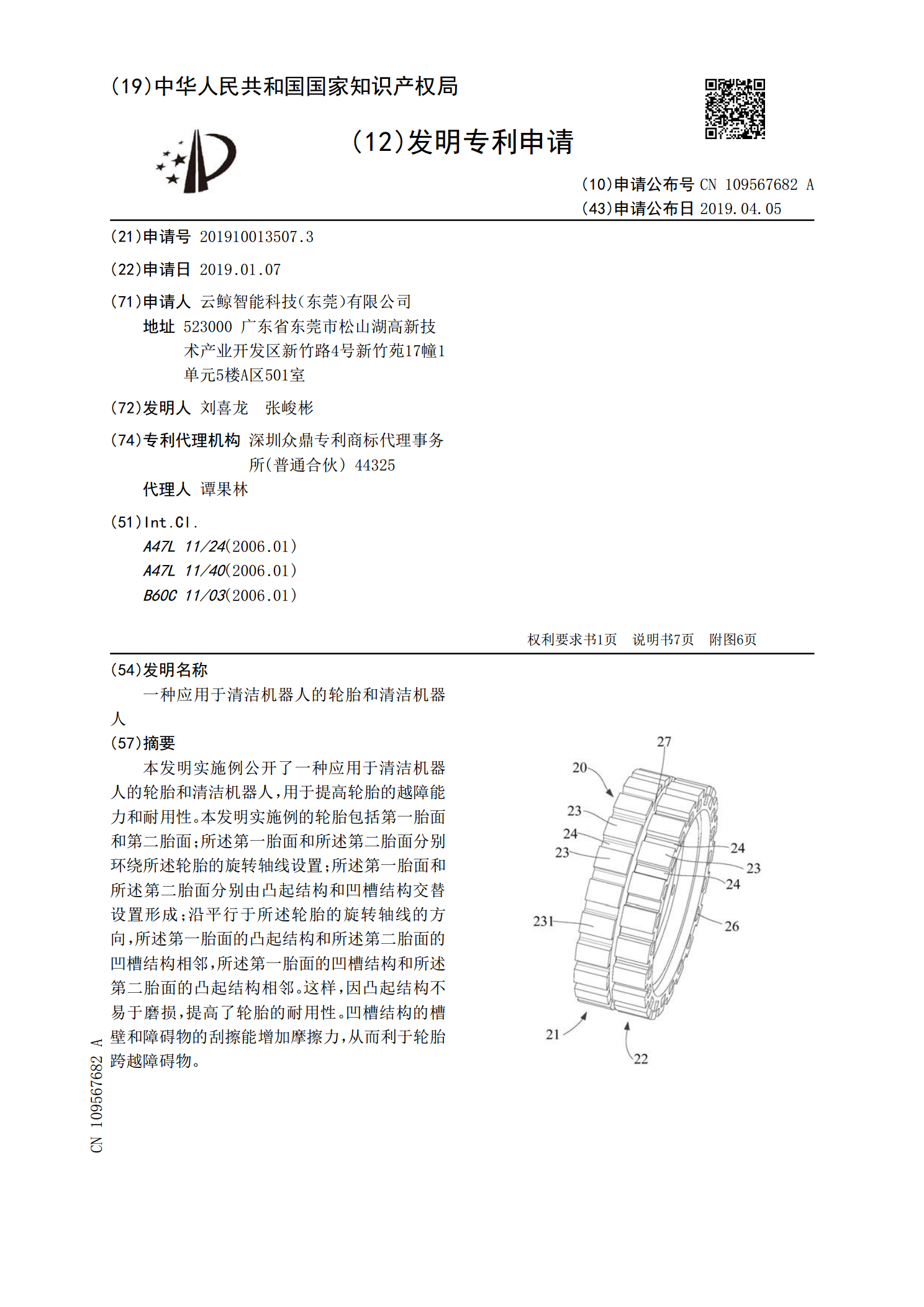
本发明实施例公开了一种应用于清洁机器人的轮胎和清洁机器人,用于提高轮胎的越障能力和耐用性。本发明实施例的轮胎包括第一胎面和第二胎面;所述第一胎面和所述第二胎面分别环绕所述轮胎的旋转轴线设置;所述第一胎面和所述第二胎面分别由凸起结构和凹槽结构交替设置形成;沿平行于所述轮胎的旋转轴线的方向,所述第一胎面的凸起结构和所述第二胎面的凹槽结构相邻,所述第一胎面的凹槽结构和所述第二胎面的凸起结构相邻。这样,因凸起结构不易于磨损,提高了轮胎的耐用性。凹槽结构的槽壁和障碍物的刮擦能增加摩擦力,从而利于轮胎跨越障碍物。
一种清洁机构和清洁机器人.pdf
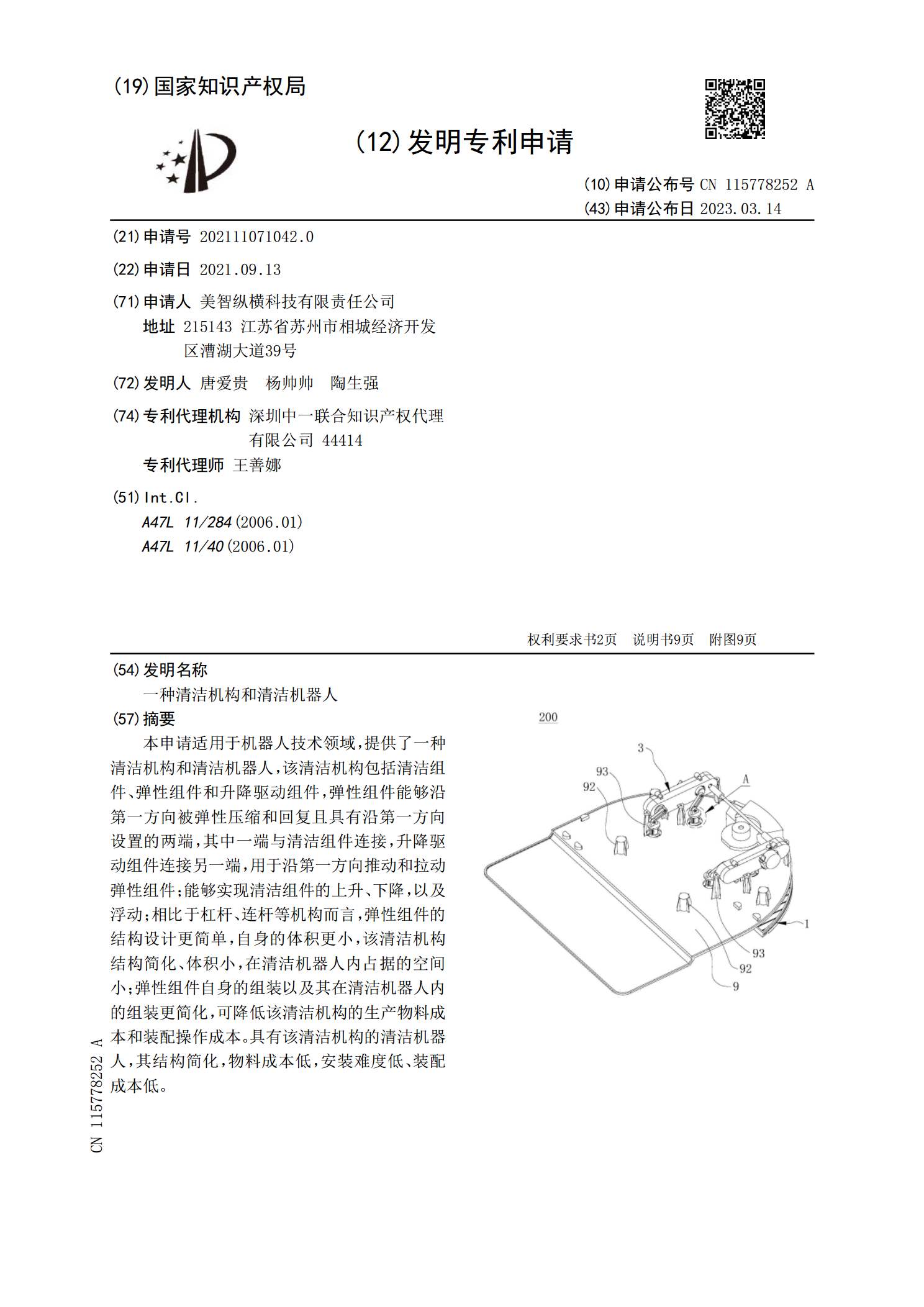
本申请适用于机器人技术领域,提供了一种清洁机构和清洁机器人,该清洁机构包括清洁组件、弹性组件和升降驱动组件,弹性组件能够沿第一方向被弹性压缩和回复且具有沿第一方向设置的两端,其中一端与清洁组件连接,升降驱动组件连接另一端,用于沿第一方向推动和拉动弹性组件;能够实现清洁组件的上升、下降,以及浮动;相比于杠杆、连杆等机构而言,弹性组件的结构设计更简单,自身的体积更小,该清洁机构结构简化、体积小,在清洁机器人内占据的空间小;弹性组件自身的组装以及其在清洁机器人内的组装更简化,可降低该清洁机构的生产物料成本和装配
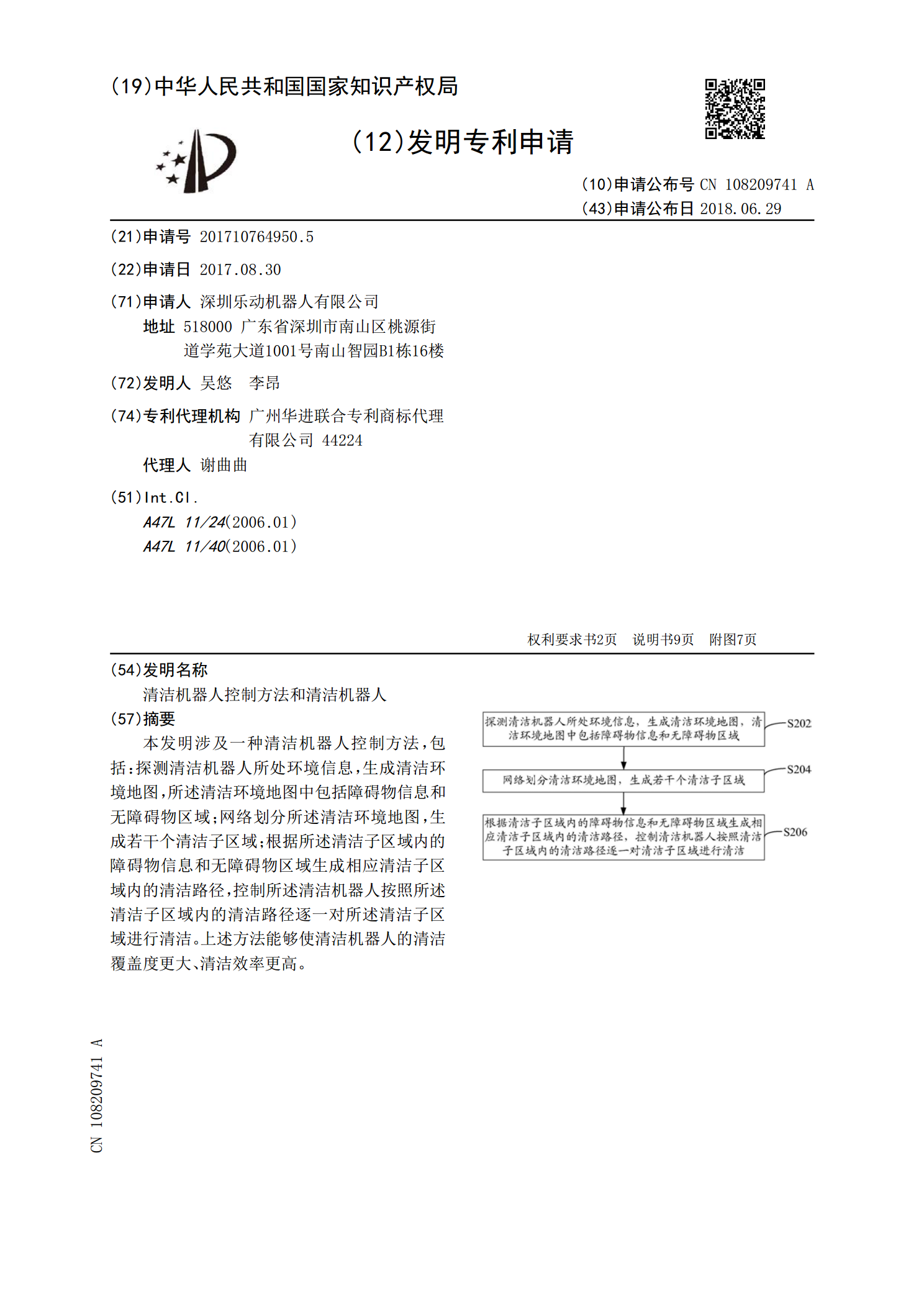
清洁机器人控制方法和清洁机器人.pdf
本发明涉及一种清洁机器人控制方法,包括:探测清洁机器人所处环境信息,生成清洁环境地图,所述清洁环境地图中包括障碍物信息和无障碍物区域;网络划分所述清洁环境地图,生成若干个清洁子区域;根据所述清洁子区域内的障碍物信息和无障碍物区域生成相应清洁子区域内的清洁路径,控制所述清洁机器人按照所述清洁子区域内的清洁路径逐一对所述清洁子区域进行清洁。上述方法能够使清洁机器人的清洁覆盖度更大、清洁效率更高。

清洁机器人信息加载方法和清洁机器人.pdf
本申请涉及一种清洁机器人信息加载方法和清洁机器人。清洁机器人信息加载方法包括:检测是否满足预设的重新加载触发条件;若是,则获取待使用的地图信息并执行地图信息加载操作,得到新加载的用于执行任务的地图信息;根据新加载的用于执行任务的地图信息获取清洁机器人的位姿。采用本方法,清洁机器人可以具备重新加载地图的能力,使得清洁机器人在工作过程中,可以灵活进行地图信息的重载,而不限于固定的地图信息对应的一张地图,避免没有地图信息可适用而无法完成任务,可提高程序的鲁棒性,从而提高清洁机器人执行任务的可靠性。
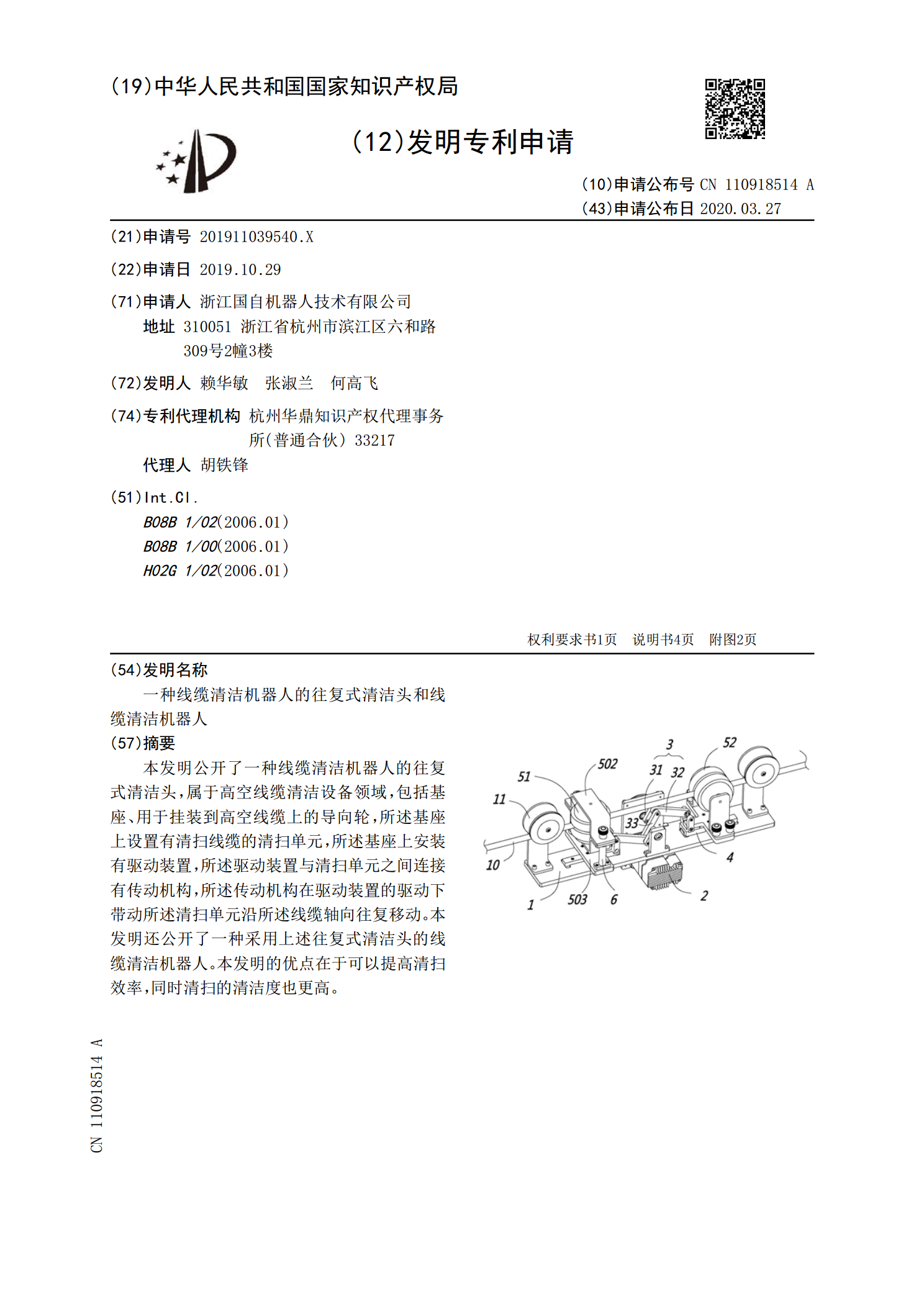
一种线缆清洁机器人的往复式清洁头和线缆清洁机器人.pdf
本发明公开了一种线缆清洁机器人的往复式清洁头,属于高空线缆清洁设备领域,包括基座、用于挂装到高空线缆上的导向轮,所述基座上设置有清扫线缆的清扫单元,所述基座上安装有驱动装置,所述驱动装置与清扫单元之间连接有传动机构,所述传动机构在驱动装置的驱动下带动所述清扫单元沿所述线缆轴向往复移动。本发明还公开了一种采用上述往复式清洁头的线缆清洁机器人。本发明的优点在于可以提高清扫效率,同时清扫的清洁度也更高。