
一种多轮分布式混合动力系统驱动防滑控制方法.pdf

书生****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多轮分布式混合动力系统驱动防滑控制方法.pdf
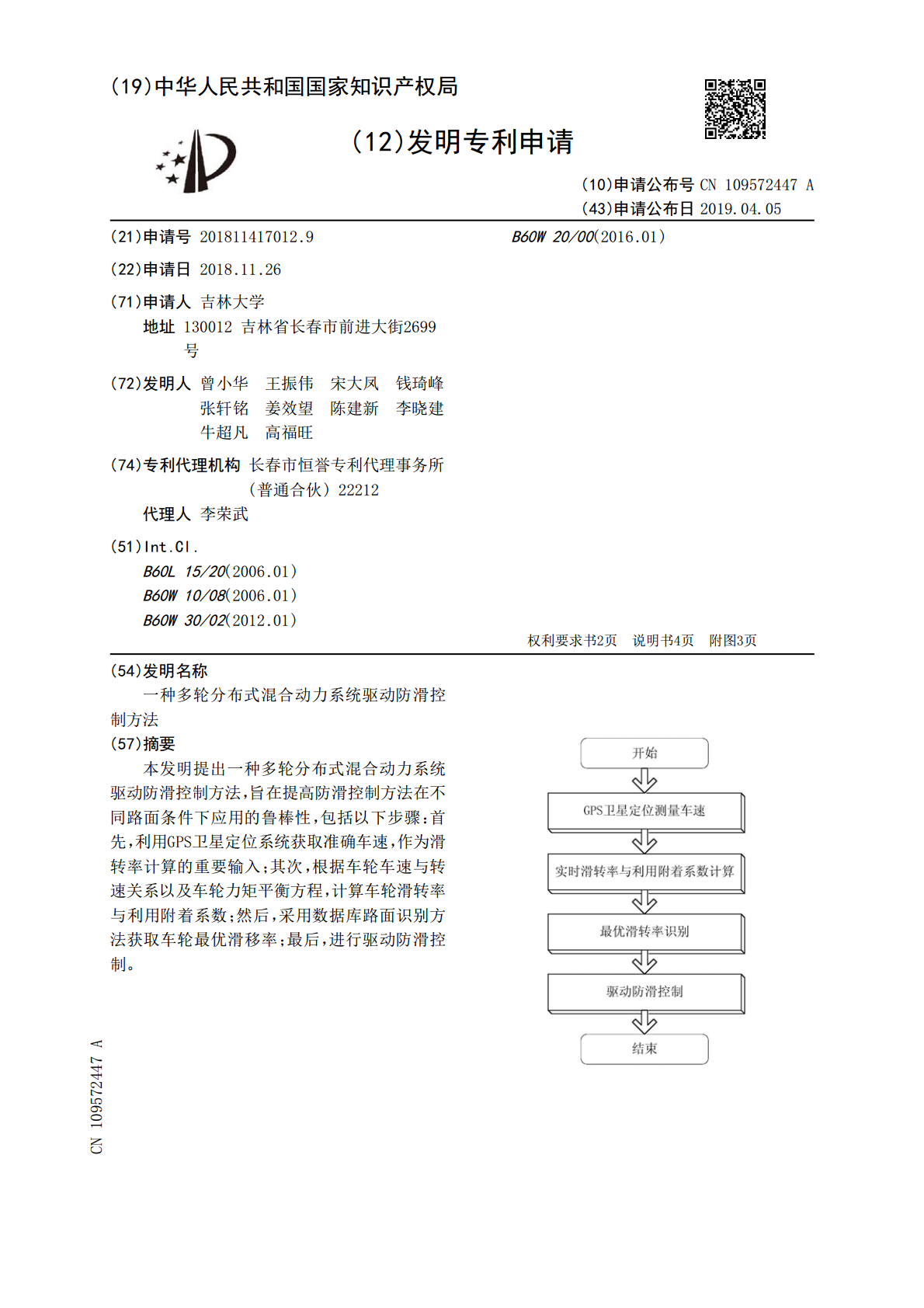
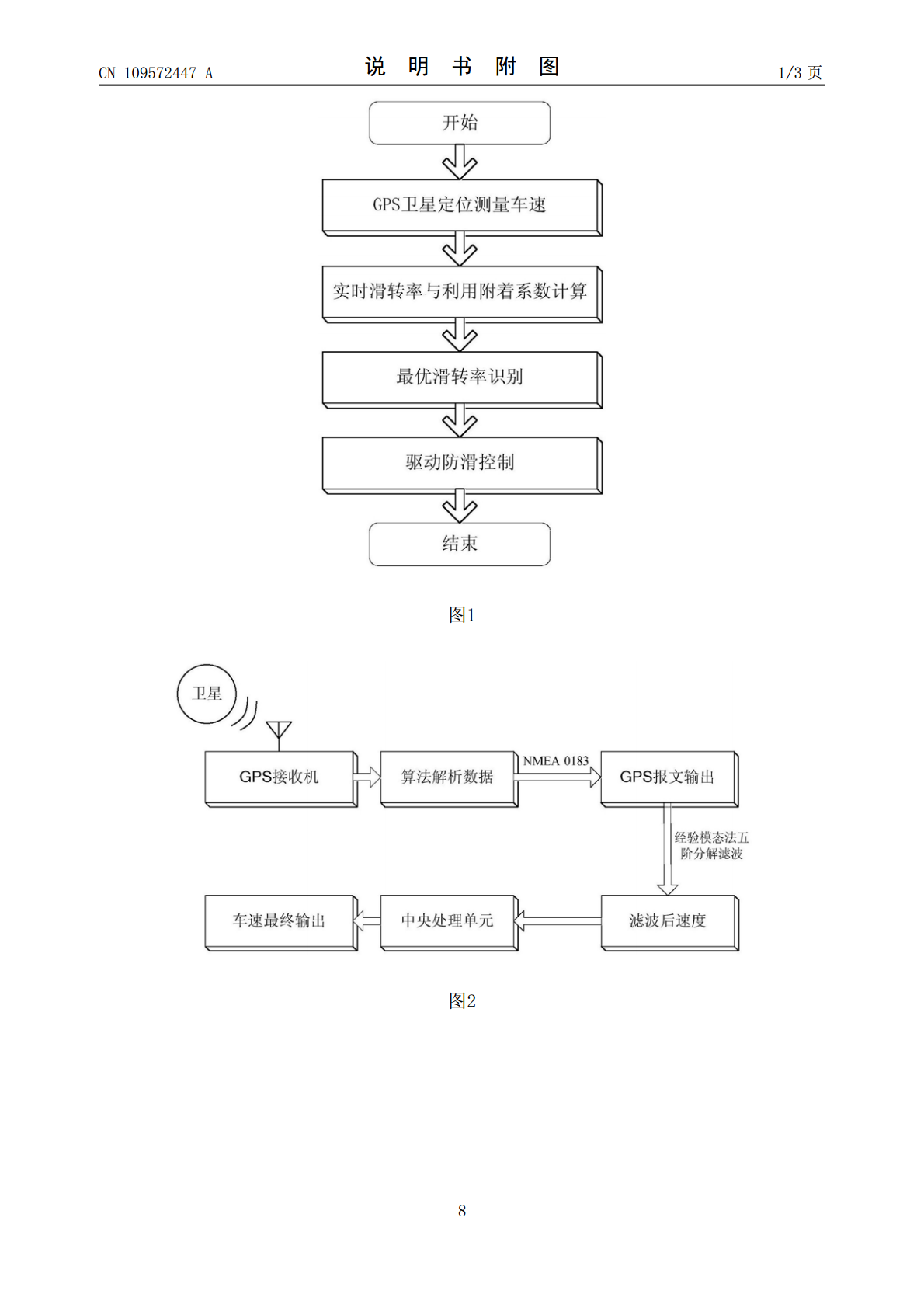
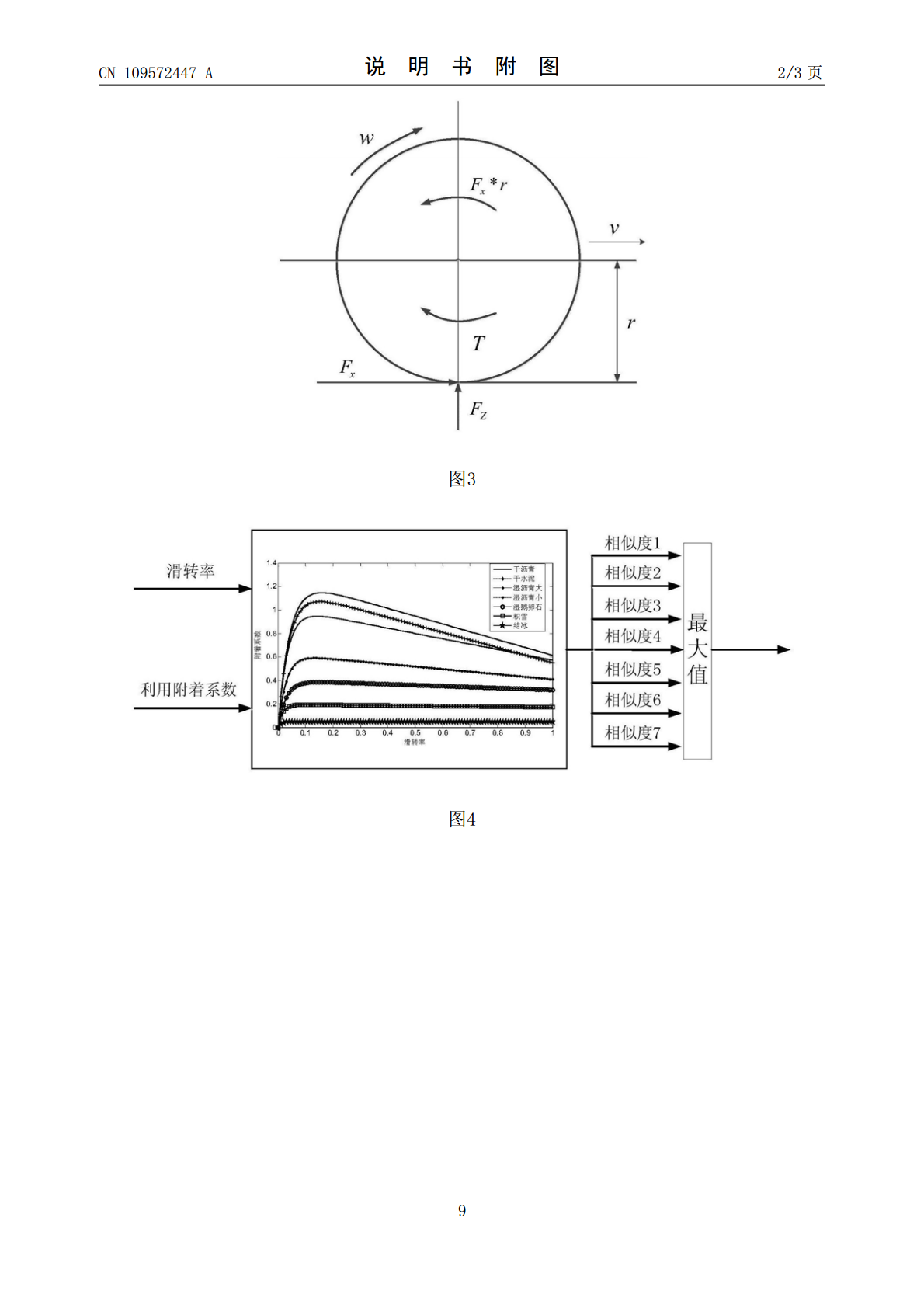
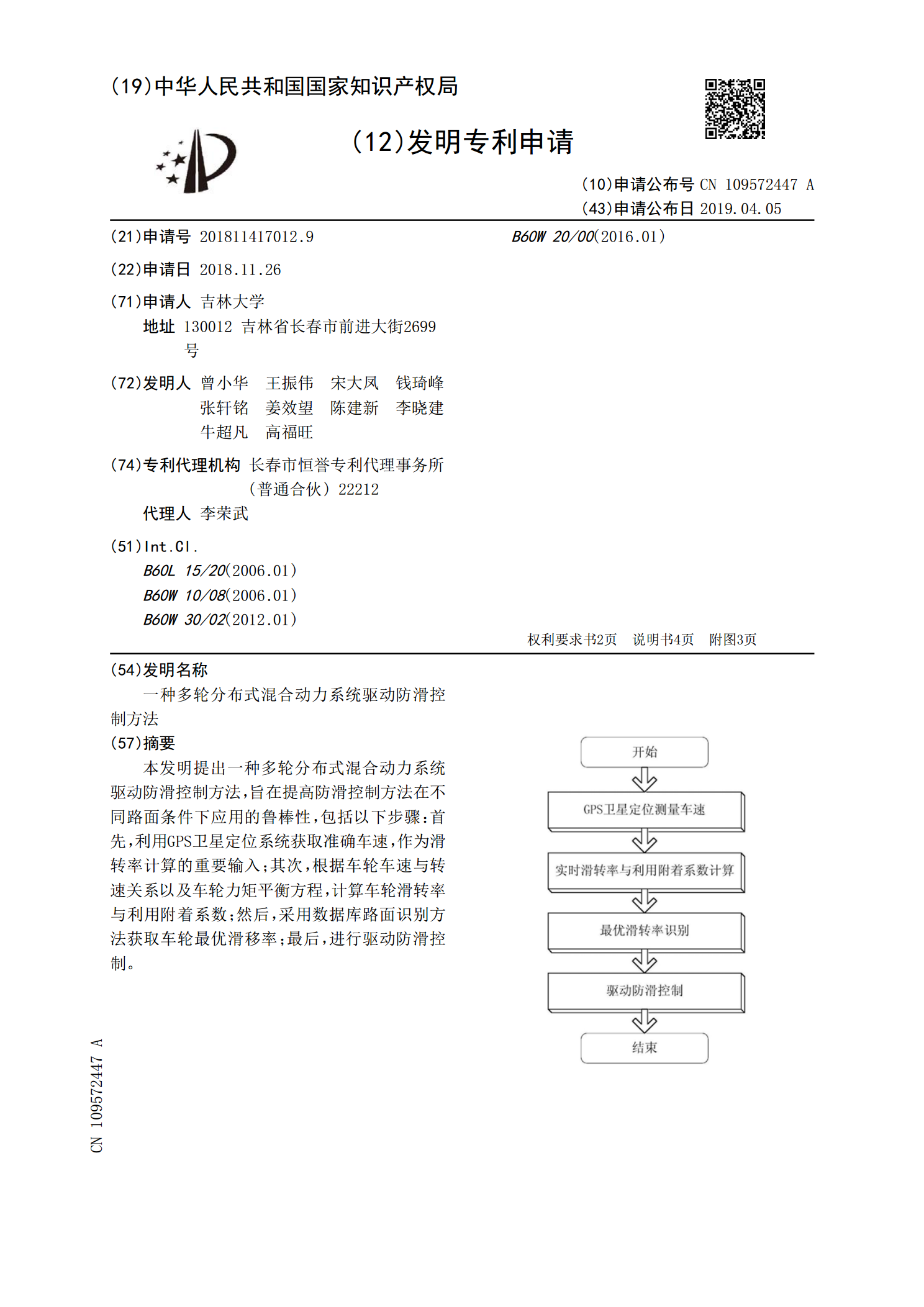
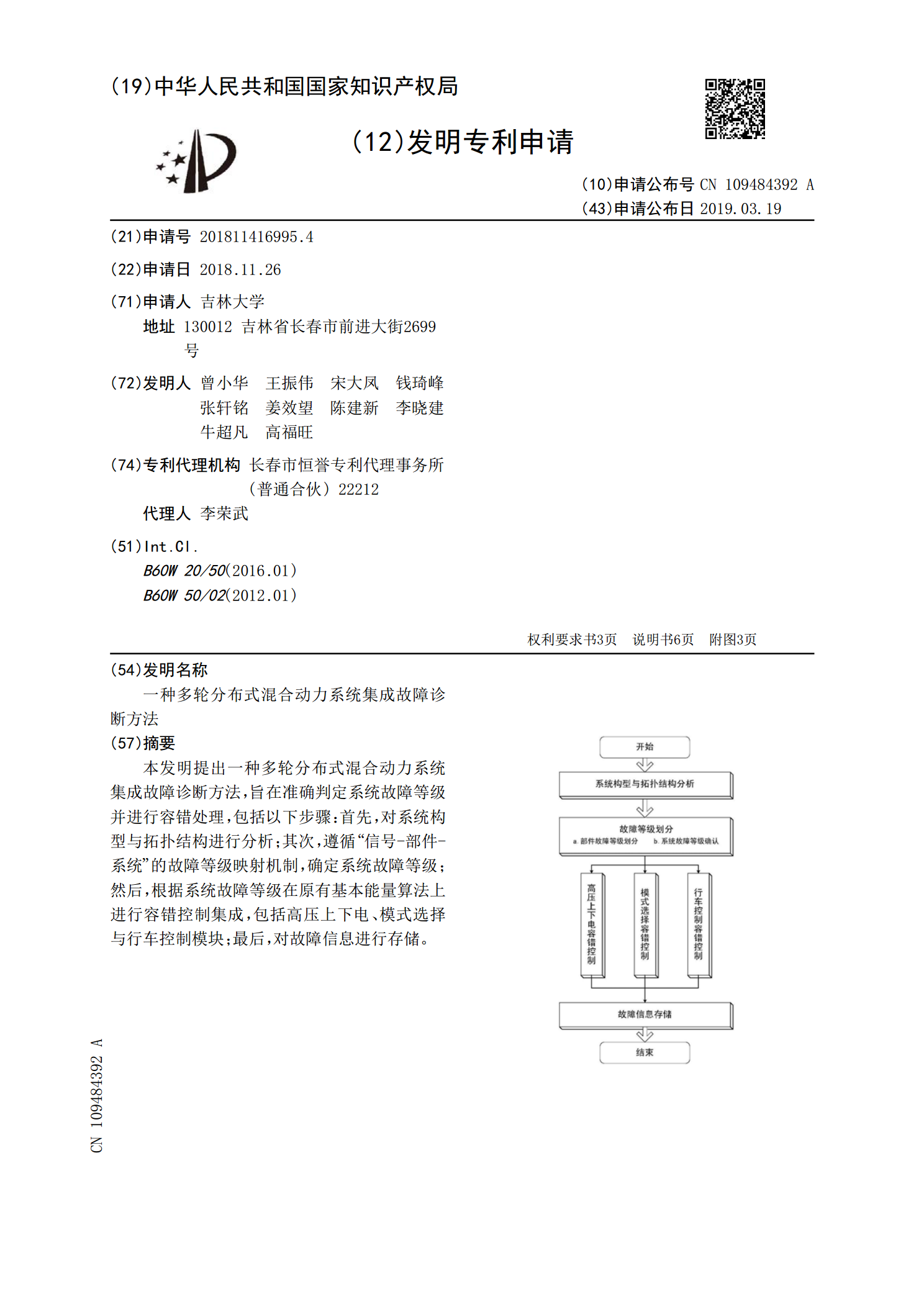
本发明提出一种多轮分布式混合动力系统驱动防滑控制方法,旨在提高防滑控制方法在不同路面条件下应用的鲁棒性,包括以下步骤:首先,利用GPS卫星定位系统获取准确车速,作为滑转率计算的重要输入;其次,根据车轮车速与转速关系以及车轮力矩平衡方程,计算车轮滑转率与利用附着系数;然后,采用数据库路面识别方法获取车轮最优滑移率;最后,进行驱动防滑控制。

混合动力汽车的驱动防滑控制系统及其驱动防滑控制方法.pdf
一种用于混合动力汽车的驱动防滑控制系统,包括轮速传感器(31)、制动控制器(32)、电子节气门(33)、电机控制器(34)和整车控制器(35)。轮速传感器(31)向制动控制器(32)发送轮速信号;整车控制器(35)向制动控制器(32)发送节气门开度参考值信号和电机转矩参考值信号;制动控制器(32)向电子节气门(33)发送节气门开度命令值信号,控制电子节气门(33)的开度;制动控制器(32)向电机控制器(34)发送电机转矩命令值,控制电机转矩的大小。本发明根据驱动轮的滑转率对电机目标转矩实施PID控
一种多轮分布式混合动力系统集成故障诊断方法.pdf
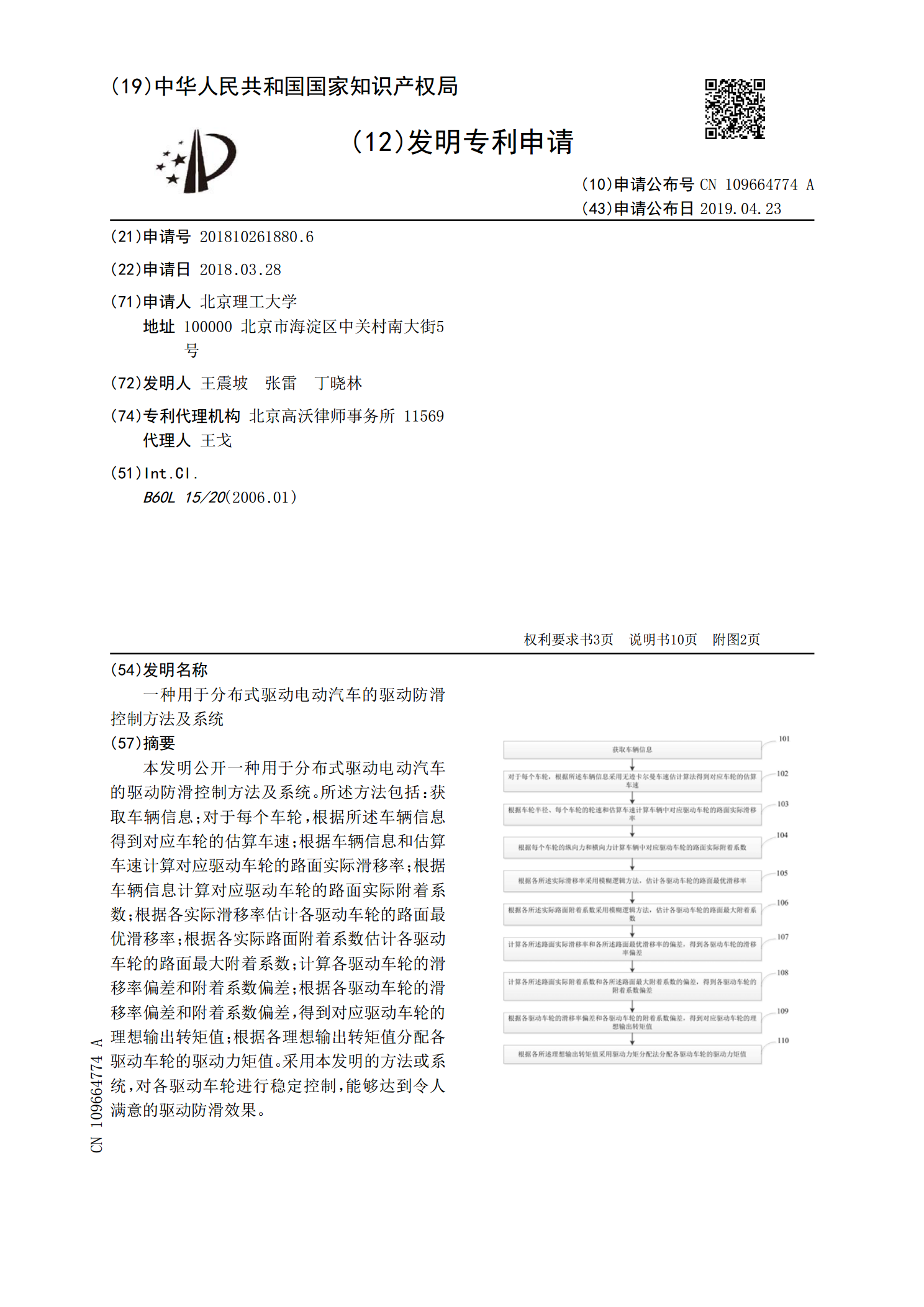
本发明提出一种多轮分布式混合动力系统集成故障诊断方法,旨在准确判定系统故障等级并进行容错处理,包括以下步骤:首先,对系统构型与拓扑结构进行分析;其次,遵循“信号‑部件‑系统”的故障等级映射机制,确定系统故障等级;然后,根据系统故障等级在原有基本能量算法上进行容错控制集成,包括高压上下电、模式选择与行车控制模块;最后,对故障信息进行存储。
一种用于分布式驱动电动汽车的驱动防滑控制方法及系统.pdf
本发明公开一种用于分布式驱动电动汽车的驱动防滑控制方法及系统。所述方法包括:获取车辆信息;对于每个车轮,根据所述车辆信息得到对应车轮的估算车速;根据车辆信息和估算车速计算对应驱动车轮的路面实际滑移率;根据车辆信息计算对应驱动车轮的路面实际附着系数;根据各实际滑移率估计各驱动车轮的路面最优滑移率;根据各实际路面附着系数估计各驱动车轮的路面最大附着系数;计算各驱动车轮的滑移率偏差和附着系数偏差;根据各驱动车轮的滑移率偏差和附着系数偏差,得到对应驱动车轮的理想输出转矩值;根据各理想输出转矩值分配各驱动车轮的驱动
混合制动的四轮毂电机驱动车辆制动防滑控制方法.pdf
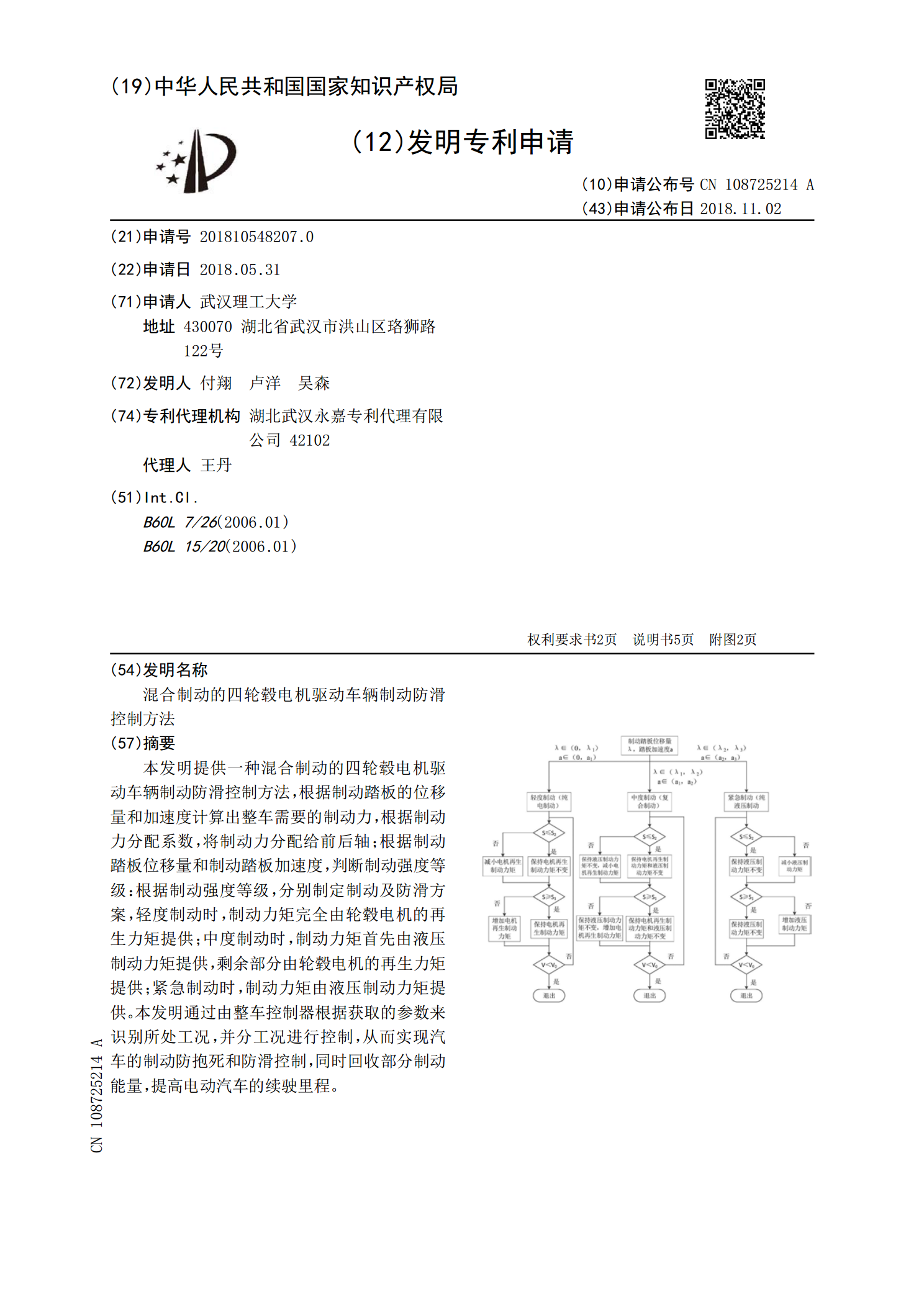
本发明提供一种混合制动的四轮毂电机驱动车辆制动防滑控制方法,根据制动踏板的位移量和加速度计算出整车需要的制动力,根据制动力分配系数,将制动力分配给前后轴;根据制动踏板位移量和制动踏板加速度,判断制动强度等级:根据制动强度等级,分别制定制动及防滑方案,轻度制动时,制动力矩完全由轮毂电机的再生力矩提供;中度制动时,制动力矩首先由液压制动力矩提供,剩余部分由轮毂电机的再生力矩提供;紧急制动时,制动力矩由液压制动力矩提供。本发明通过由整车控制器根据获取的参数来识别所处工况,并分工况进行控制,从而实现汽车的制动防抱