
一种新型腿足机器人关节结构.pdf

一吃****永贺


1/7
2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型腿足机器人关节结构.pdf
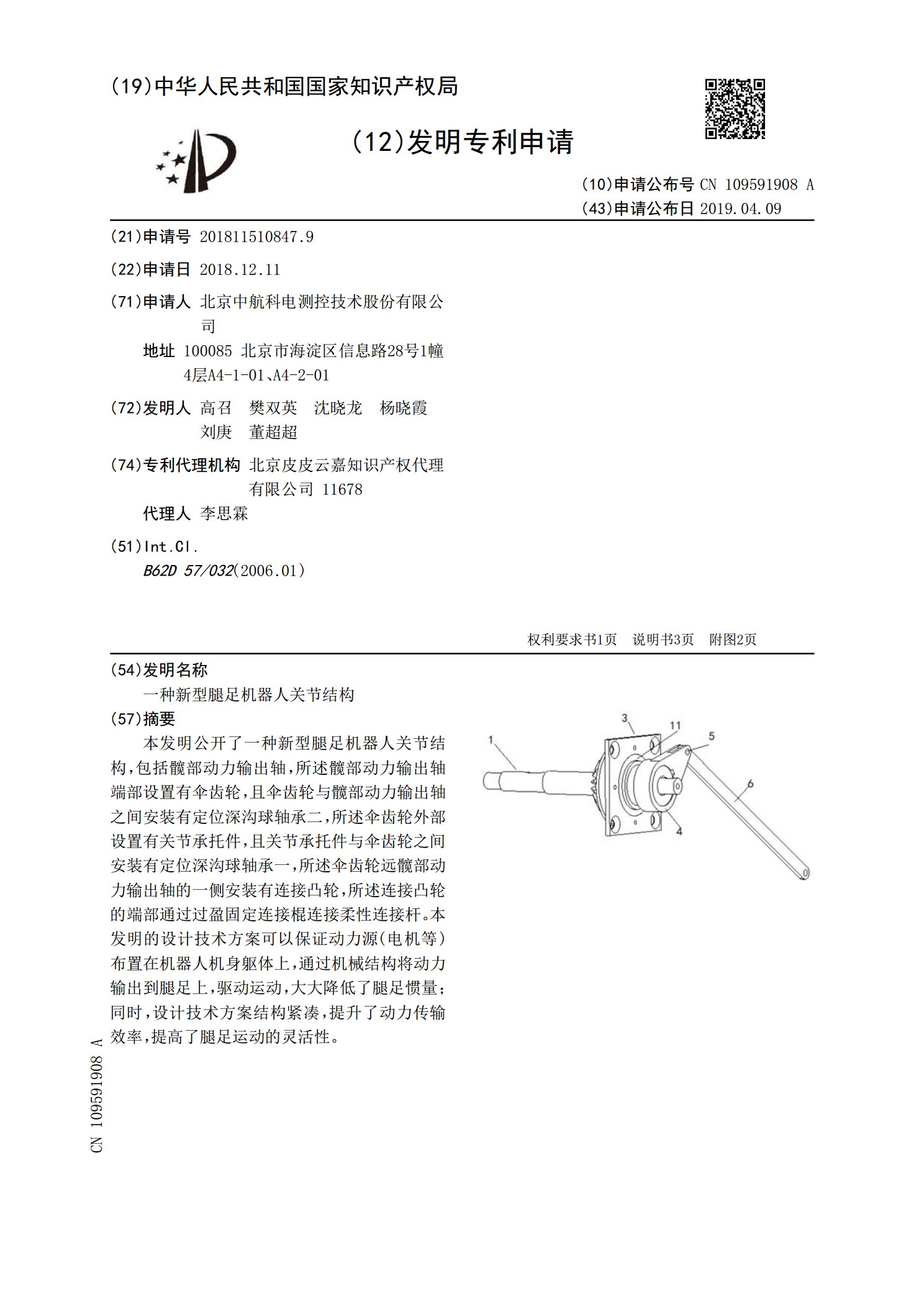
本发明公开了一种新型腿足机器人关节结构,包括髋部动力输出轴,所述髋部动力输出轴端部设置有伞齿轮,且伞齿轮与髋部动力输出轴之间安装有定位深沟球轴承二,所述伞齿轮外部设置有关节承托件,且关节承托件与伞齿轮之间安装有定位深沟球轴承一,所述伞齿轮远髋部动力输出轴的一侧安装有连接凸轮,所述连接凸轮的端部通过过盈固定连接棍连接柔性连接杆。本发明的设计技术方案可以保证动力源(电机等)布置在机器人机身躯体上,通过机械结构将动力输出到腿足上,驱动运动,大大降低了腿足惯量;同时,设计技术方案结构紧凑,提升了动力传输效率,提高
一种有膝关节并联腿结构四足仿生机器人.pdf
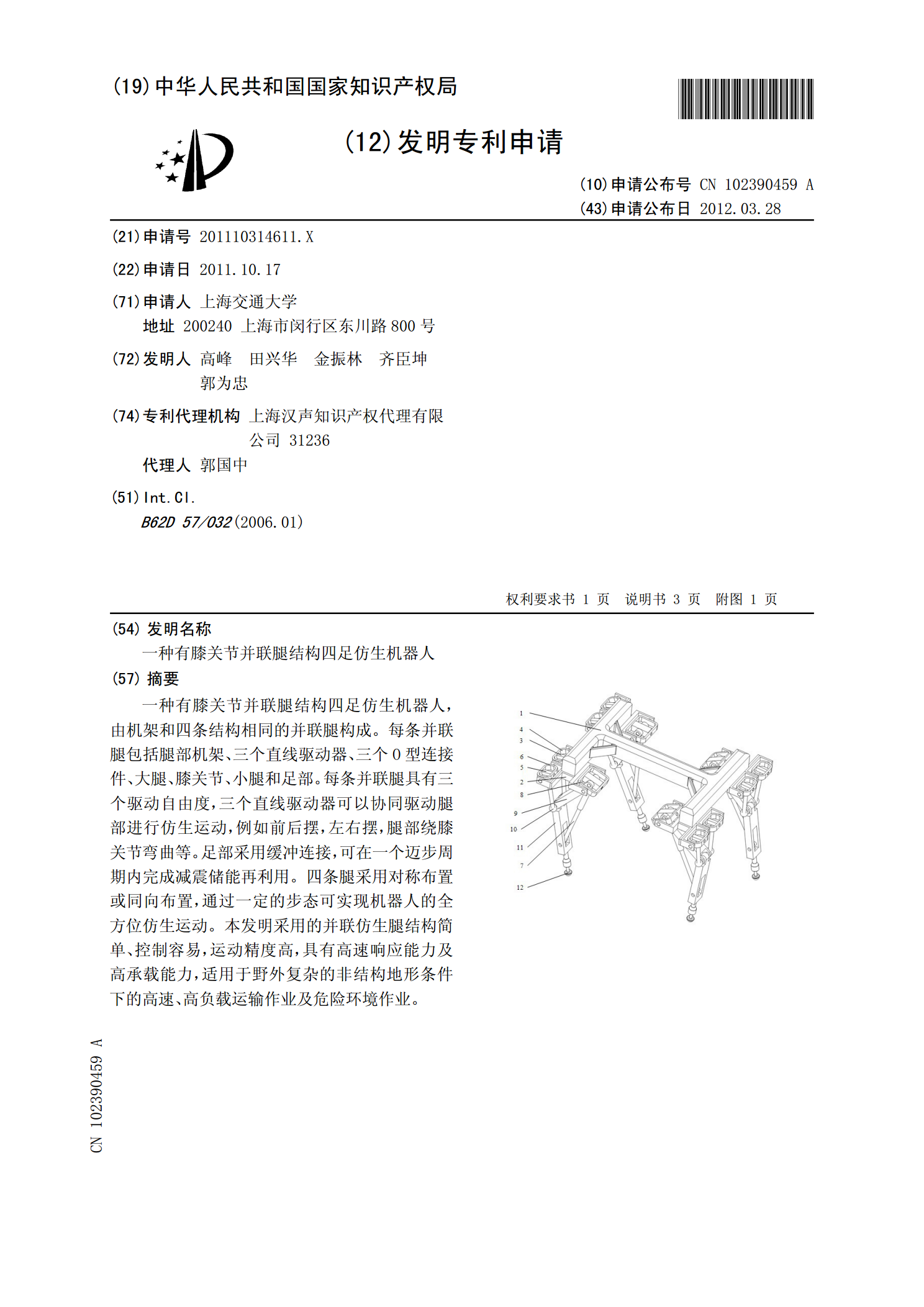
一种有膝关节并联腿结构四足仿生机器人,由机架和四条结构相同的并联腿构成。每条并联腿包括腿部机架、三个直线驱动器、三个O型连接件、大腿、膝关节、小腿和足部。每条并联腿具有三个驱动自由度,三个直线驱动器可以协同驱动腿部进行仿生运动,例如前后摆,左右摆,腿部绕膝关节弯曲等。足部采用缓冲连接,可在一个迈步周期内完成减震储能再利用。四条腿采用对称布置或同向布置,通过一定的步态可实现机器人的全方位仿生运动。本发明采用的并联仿生腿结构简单、控制容易,运动精度高,具有高速响应能力及高承载能力,适用于野外复杂的非结构地形条
四关节液压足式机器人腿.pdf
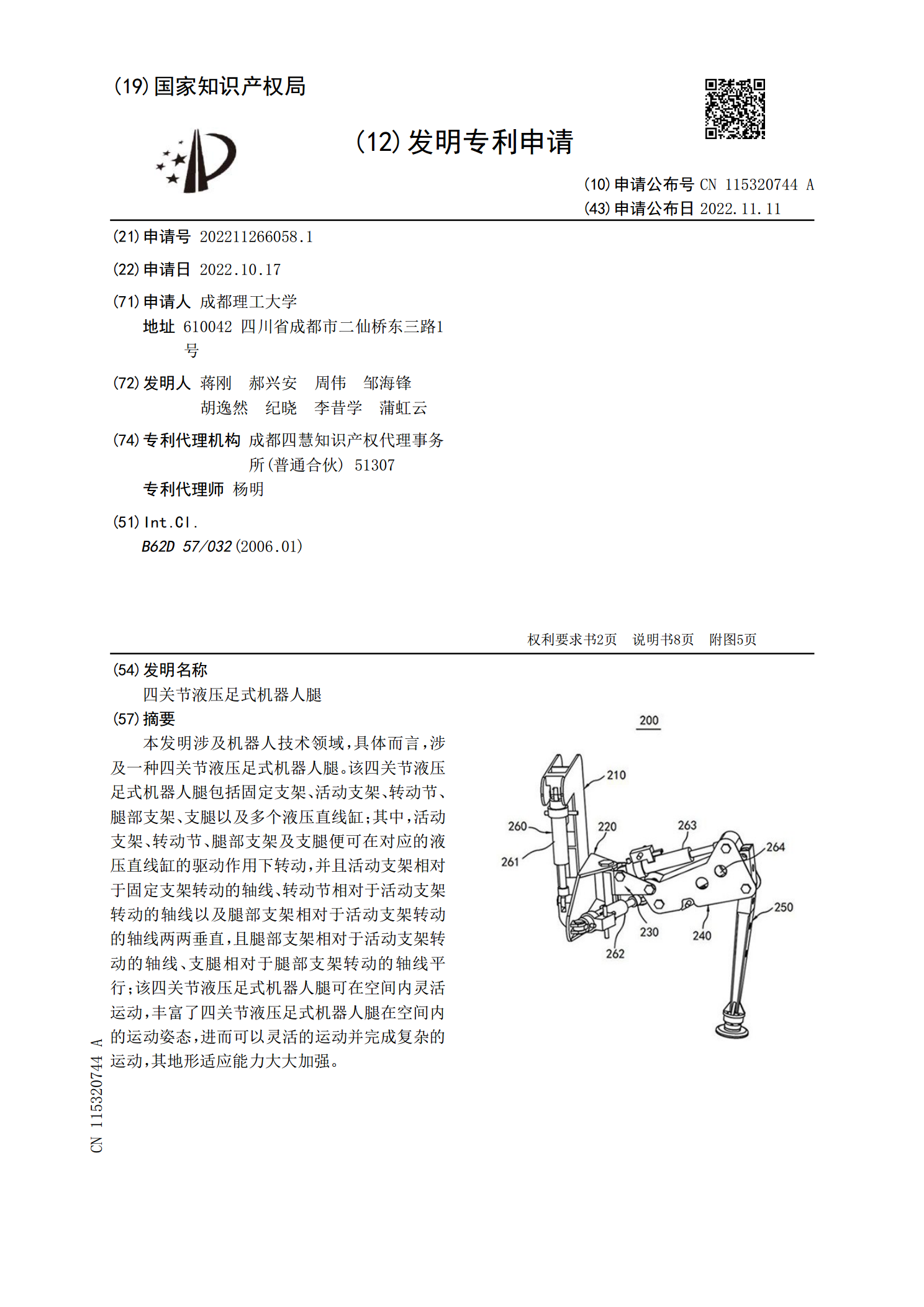
本发明涉及机器人技术领域,具体而言,涉及一种四关节液压足式机器人腿。该四关节液压足式机器人腿包括固定支架、活动支架、转动节、腿部支架、支腿以及多个液压直线缸;其中,活动支架、转动节、腿部支架及支腿便可在对应的液压直线缸的驱动作用下转动,并且活动支架相对于固定支架转动的轴线、转动节相对于活动支架转动的轴线以及腿部支架相对于活动支架转动的轴线两两垂直,且腿部支架相对于活动支架转动的轴线、支腿相对于腿部支架转动的轴线平行;该四关节液压足式机器人腿可在空间内灵活运动,丰富了四关节液压足式机器人腿在空间内的运动姿态
新型轮腿复合结构及四足仿生机器人.pdf
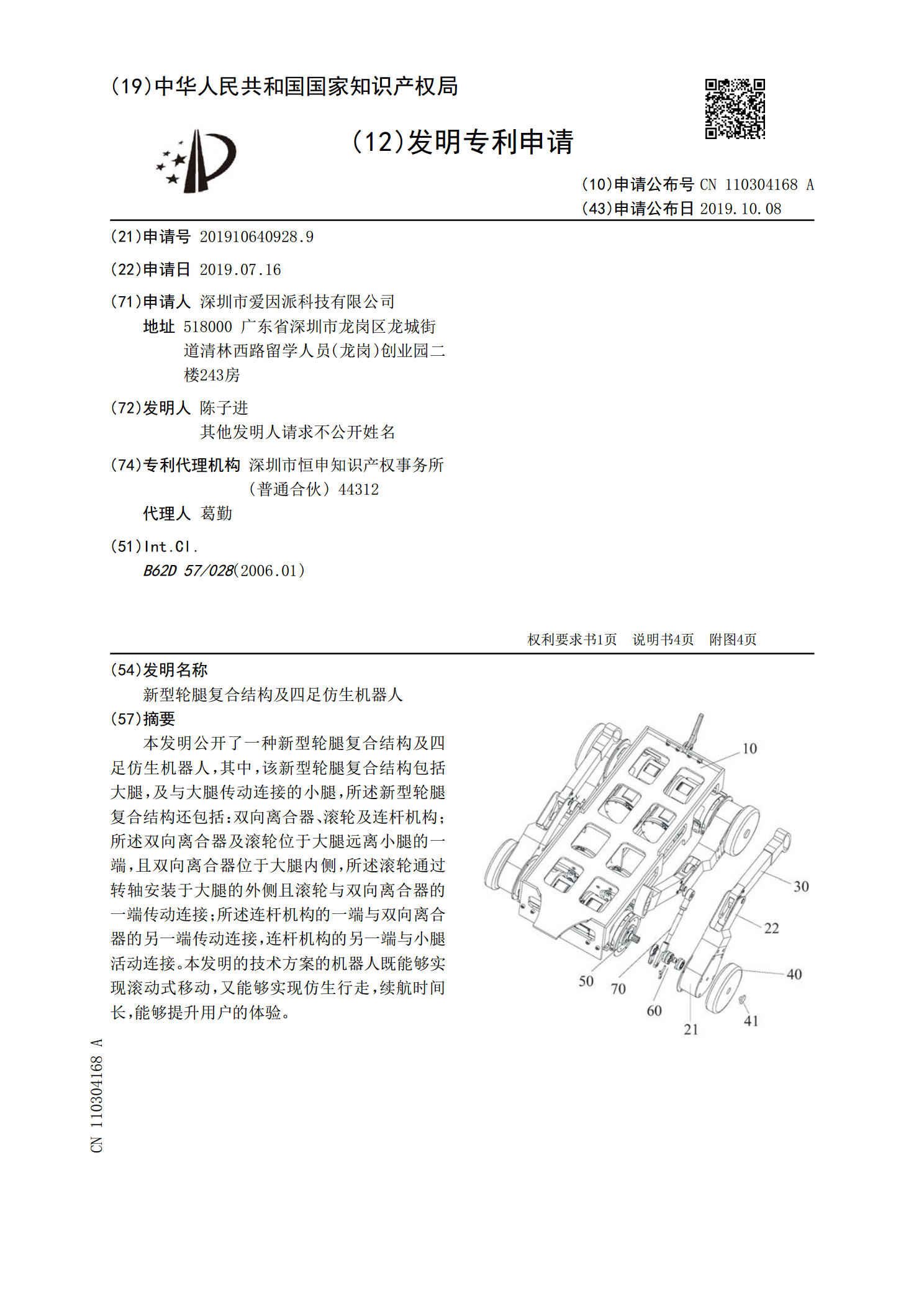
本发明公开了一种新型轮腿复合结构及四足仿生机器人,其中,该新型轮腿复合结构包括大腿,及与大腿传动连接的小腿,所述新型轮腿复合结构还包括:双向离合器、滚轮及连杆机构;所述双向离合器及滚轮位于大腿远离小腿的一端,且双向离合器位于大腿内侧,所述滚轮通过转轴安装于大腿的外侧且滚轮与双向离合器的一端传动连接;所述连杆机构的一端与双向离合器的另一端传动连接,连杆机构的另一端与小腿活动连接。本发明的技术方案的机器人既能够实现滚动式移动,又能够实现仿生行走,续航时间长,能够提升用户的体验。
新型并联腿结构四足步行器.pdf
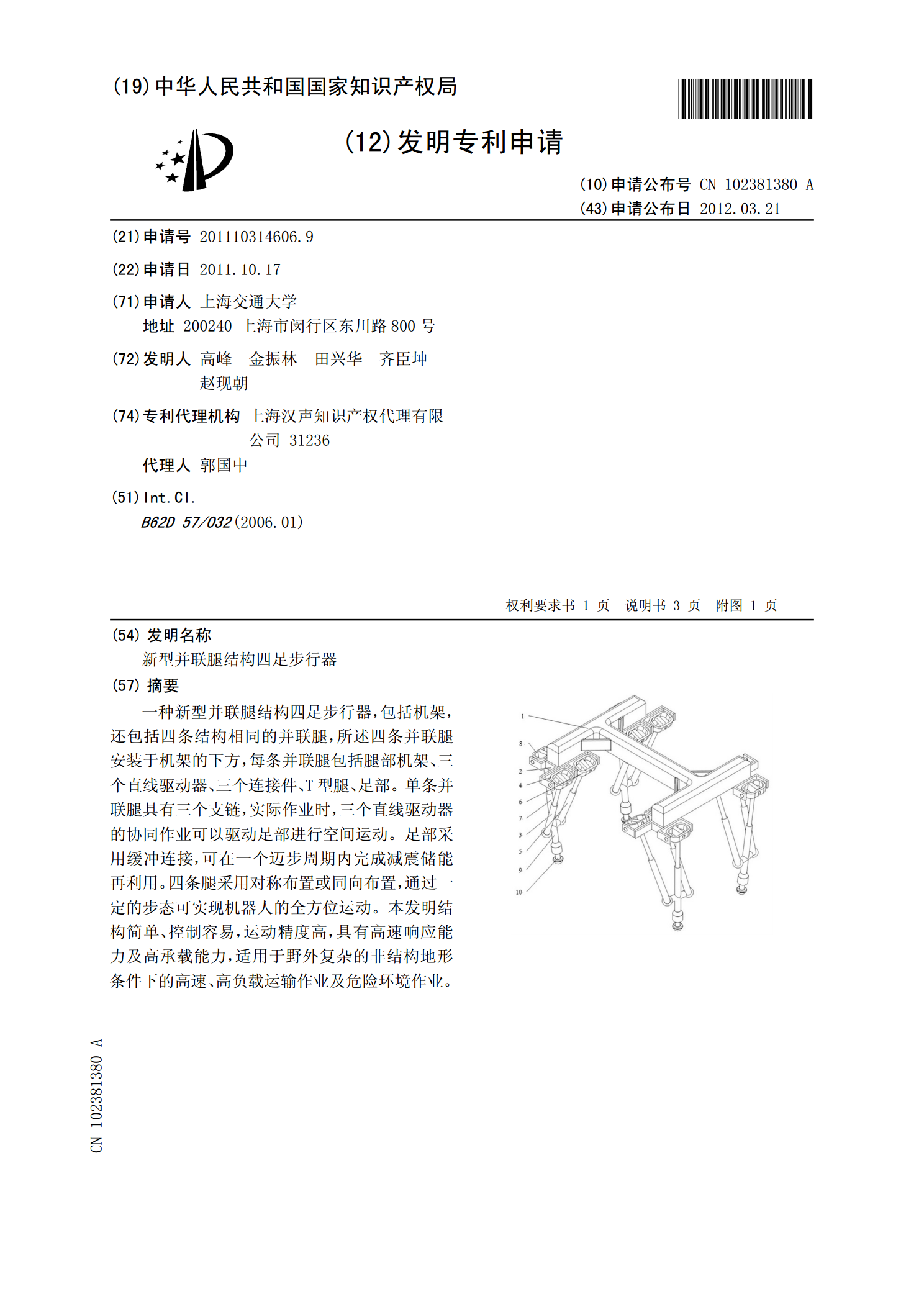
一种新型并联腿结构四足步行器,包括机架,还包括四条结构相同的并联腿,所述四条并联腿安装于机架的下方,每条并联腿包括腿部机架、三个直线驱动器、三个连接件、T型腿、足部。单条并联腿具有三个支链,实际作业时,三个直线驱动器的协同作业可以驱动足部进行空间运动。足部采用缓冲连接,可在一个迈步周期内完成减震储能再利用。四条腿采用对称布置或同向布置,通过一定的步态可实现机器人的全方位运动。本发明结构简单、控制容易,运动精度高,具有高速响应能力及高承载能力,适用于野外复杂的非结构地形条件下的高速、高负载运输作业及危险环境