
一种主动转向系统、主动转向控制方法及车辆的控制装置.pdf

Do****76

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种主动转向系统、主动转向控制方法及车辆的控制装置.pdf
本发明涉及汽车工程技术领域,具体涉及一种主动转向系统、主动转向控制方法及车辆的控制装置。通过控制装置控制车辆对当前的转向模式进行选择,当选择当前转向模式为自动驾驶转向模式时,获取路况信息以及车辆状态信息,并根据获取的信息进行理想转角计算,得到理想转矩,然后控制装置控制电动助力装置输出理想转矩至力矩传递机构,液压转向器根据力矩传递机构传递的力矩对车辆轮胎进行液压助力,进而实现对车辆轮胎的主动转向。

铁路车辆用主动转向控制装置及方法.pdf
本发明涉及一种铁路车辆用主动转向控制装置及方法,更详细地,涉及一种列车在曲线区间行驶时,实时推定曲线的曲率半径,并根据推定的曲率半径控制轮轴具有最佳的轮轴转向角,从而顺畅地使行驶中的铁路车辆转向,能够大幅减小曲线区间与轮轴之间存在的迎角的铁路车辆用主动转向控制装置及方法。本发明的铁路车辆用主动转向控制装置,其特征在于,包括:测定部,其用于测定行驶中的铁路车辆的行驶数据;推定部,其利用由上述测定部测定的数据来推定铁路车辆行驶的曲线线路的曲率半径;计算部,其利用由上述推定部推定的曲率半径来设定行驶中的铁路车辆

车辆主动悬架与主动转向系统集成控制研究.docx
车辆主动悬架与主动转向系统集成控制研究车辆主动悬架与主动转向系统集成控制研究摘要:随着科技的进步和汽车工业的发展,车辆的安全性和舒适性一直是人们关注的焦点。车辆主动悬架和主动转向系统被认为是提高车辆性能的重要手段之一。本文通过对车辆主动悬架与主动转向系统的原理和控制方法进行深入研究,提出了一种集成控制方法,旨在提高车辆的操控性能和乘坐舒适性。一、引言随着人们对驾驶体验和舒适性要求的不断提高,车辆悬架和转向系统的研究逐渐成为汽车工程的热点领域。车辆主动悬架和主动转向系统通过实时感知车辆路况和驾驶员意图,通过
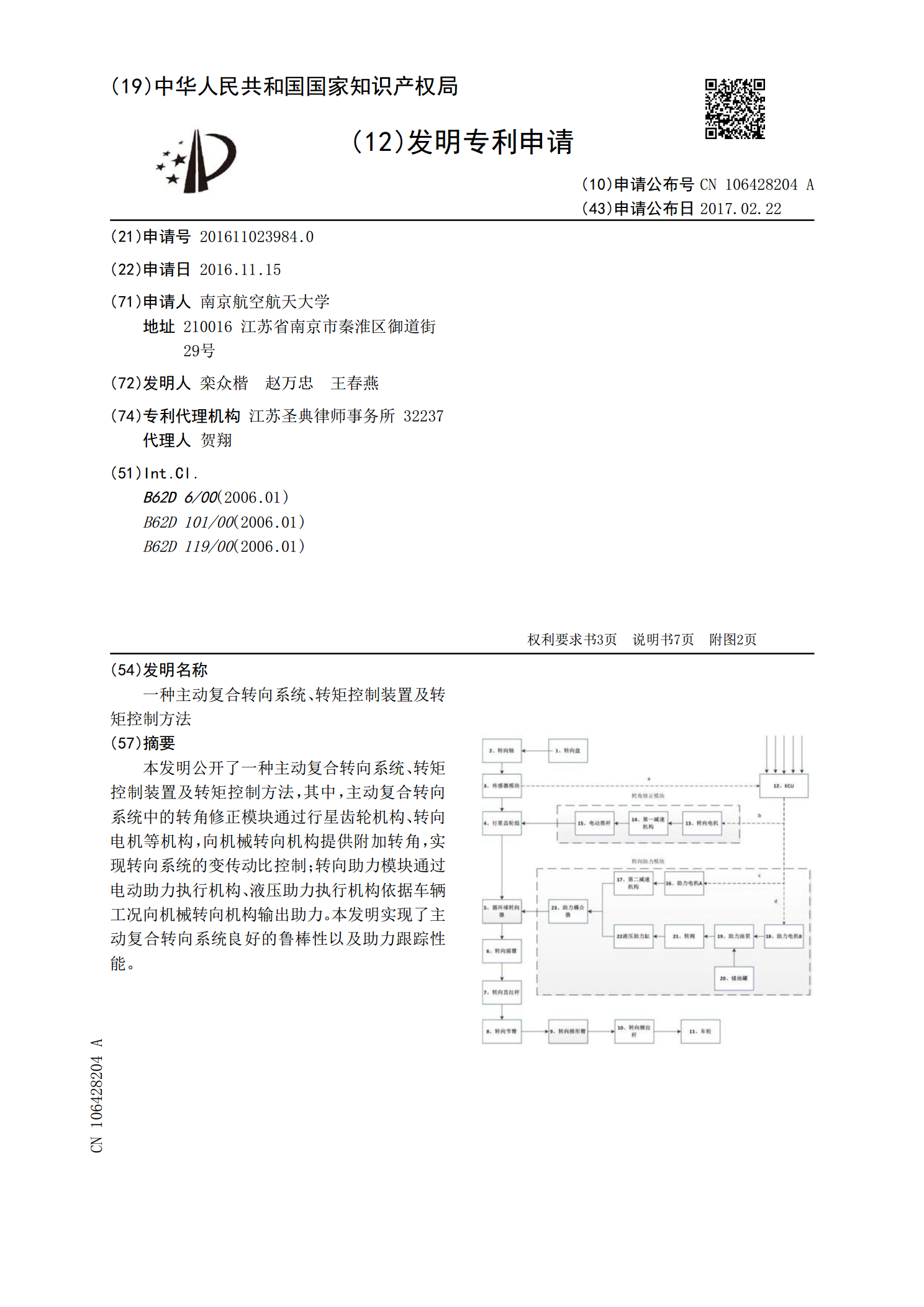
一种主动复合转向系统、转矩控制装置及转矩控制方法.pdf
本发明公开了一种主动复合转向系统、转矩控制装置及转矩控制方法,其中,主动复合转向系统中的转角修正模块通过行星齿轮机构、转向电机等机构,向机械转向机构提供附加转角,实现转向系统的变传动比控制;转向助力模块通过电动助力执行机构、液压助力执行机构依据车辆工况向机械转向机构输出助力。本发明实现了主动复合转向系统良好的鲁棒性以及助力跟踪性能。
车辆转向控制方法与装置、车辆转向系统、车辆.pdf
本公开涉及一种车辆转向控制方法与装置、车辆转向系统、车辆,以及计算机可读存储介质。车辆转向控制方法,包括:获取方向盘转角;根据方向盘转角、转角系数以及当前转向模式下方向盘转角与车辆各轮转角的对应关系,确定车辆各轮的目标转角,其中,转角系数与方向盘最大转角和车轮最大转角的比值正相关;根据车辆各轮的目标转角,控制车辆转向。