
多轮独立驱动电动车辆转向时的横摆稳定性的控制方法.pdf

宏硕****mo

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多轮独立驱动电动车辆转向时的横摆稳定性的控制方法.pdf
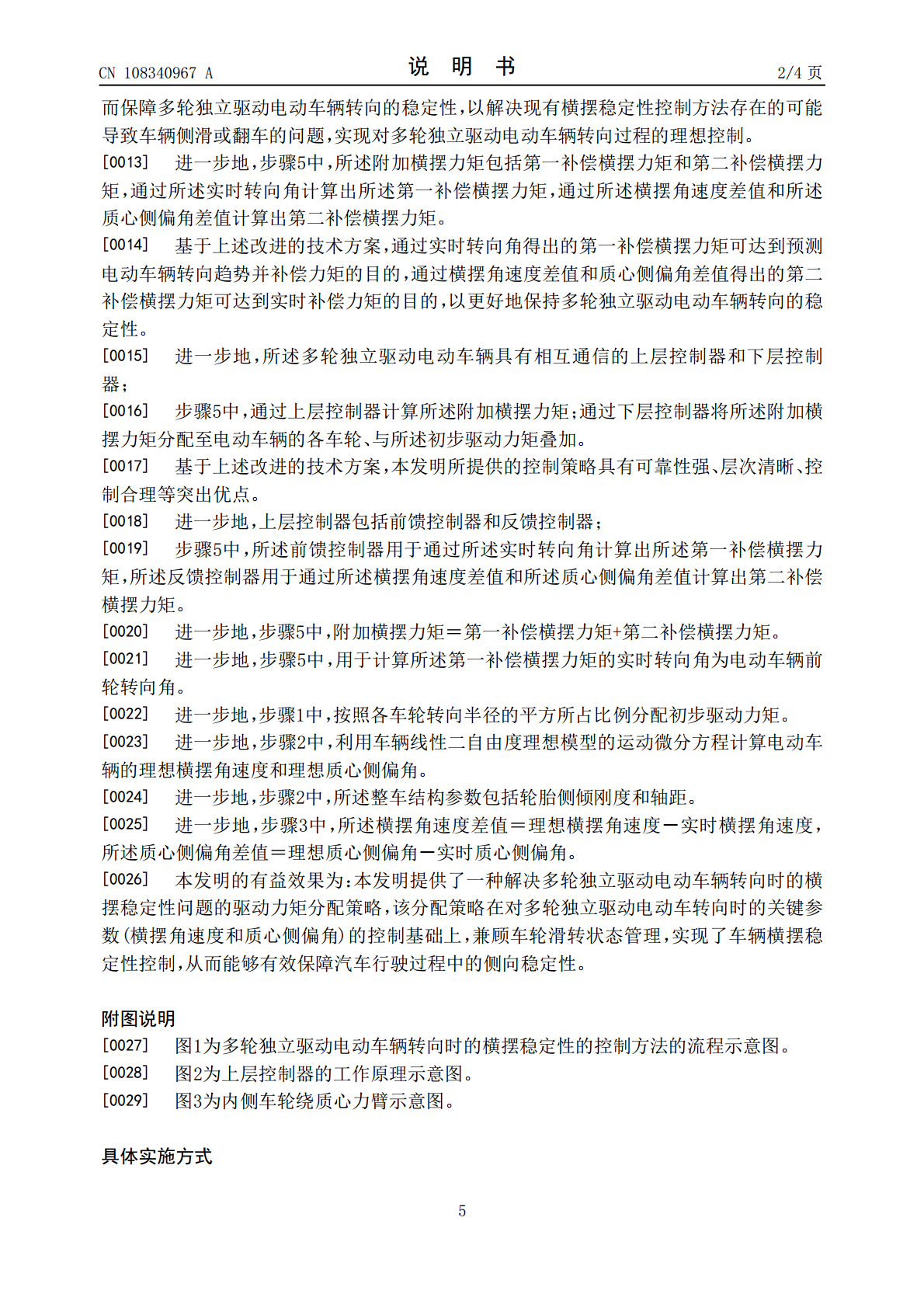
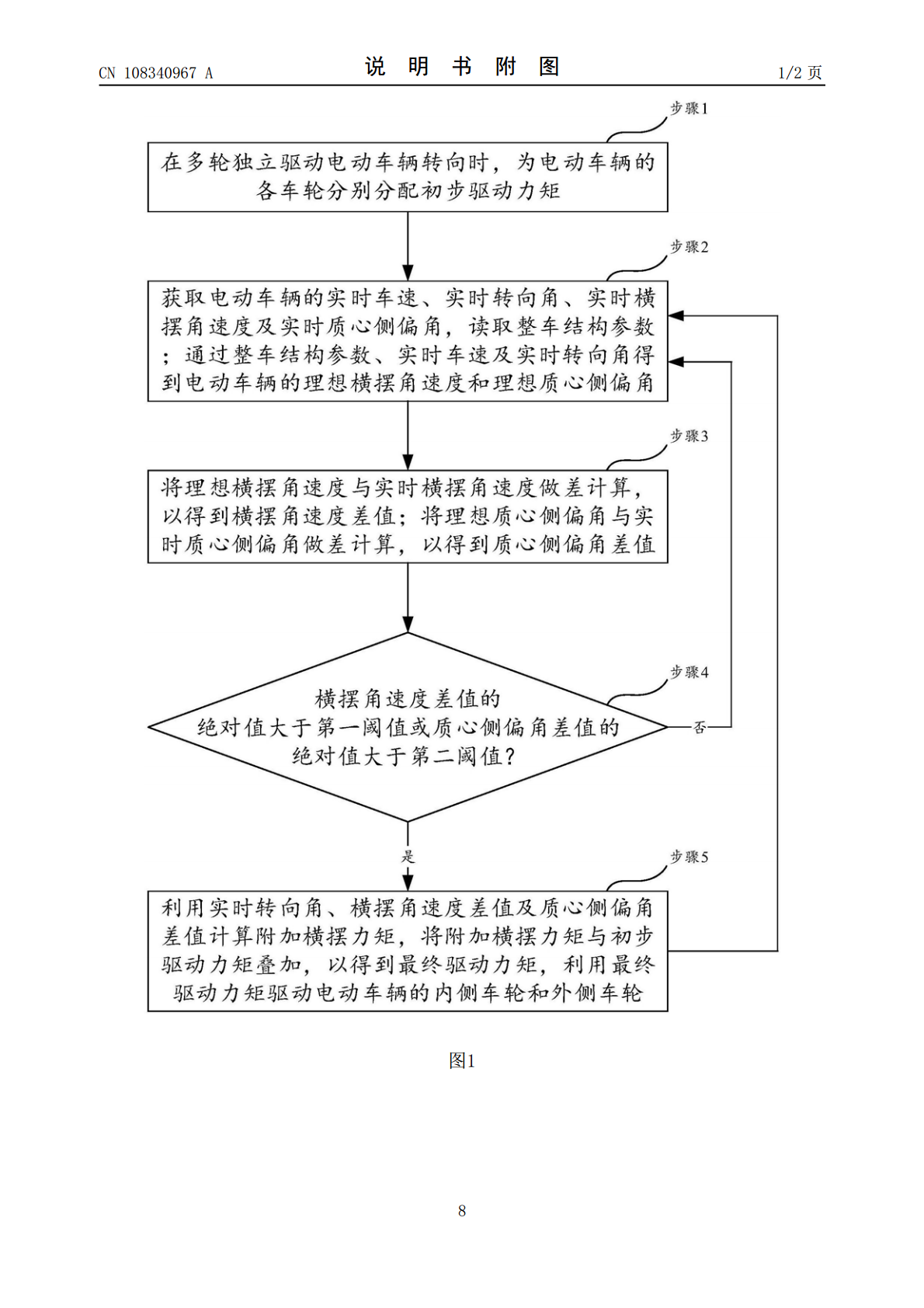
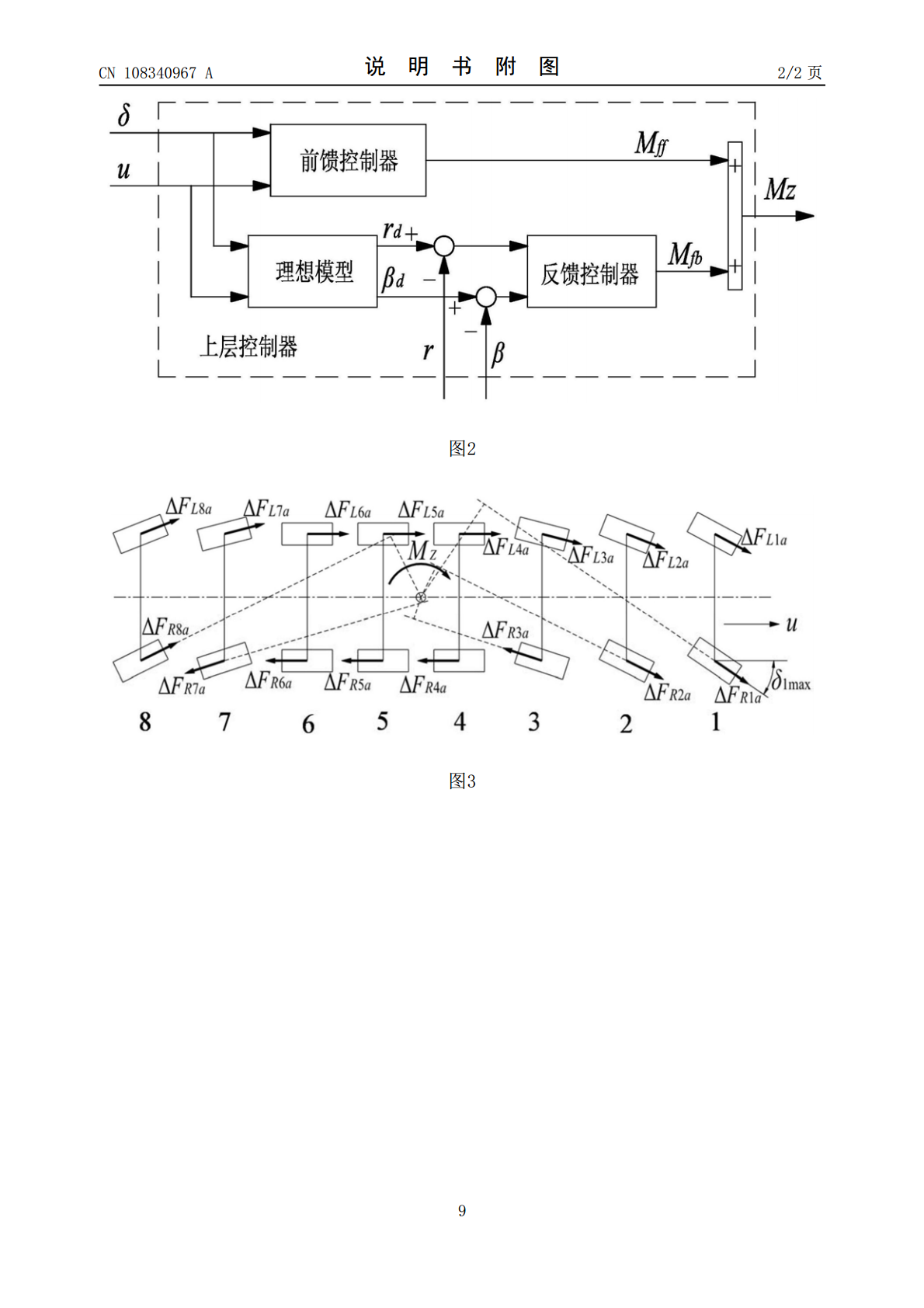
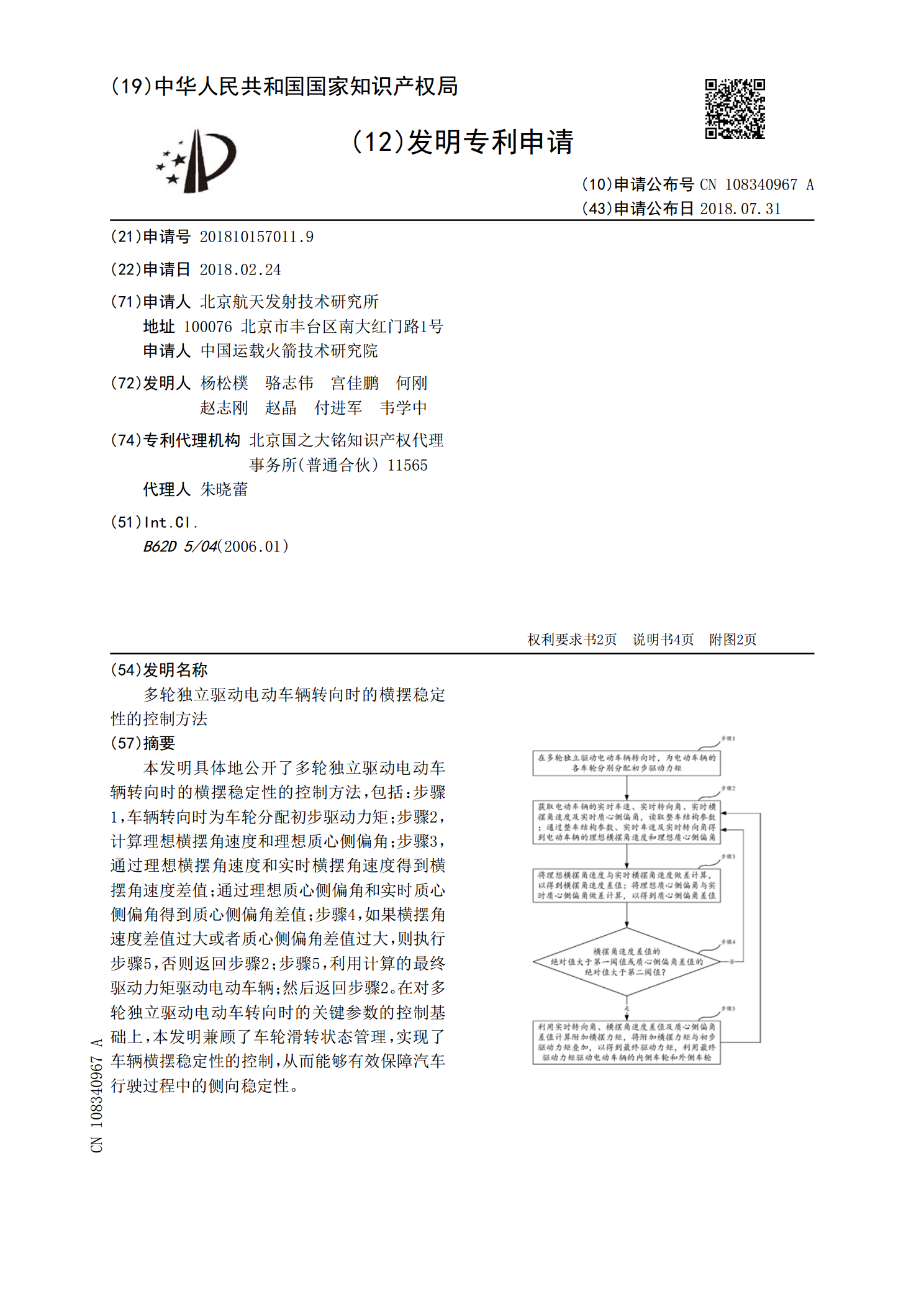
本发明具体地公开了多轮独立驱动电动车辆转向时的横摆稳定性的控制方法,包括:步骤1,车辆转向时为车轮分配初步驱动力矩;步骤2,计算理想横摆角速度和理想质心侧偏角;步骤3,通过理想横摆角速度和实时横摆角速度得到横摆角速度差值;通过理想质心侧偏角和实时质心侧偏角得到质心侧偏角差值;步骤4,如果横摆角速度差值过大或者质心侧偏角差值过大,则执行步骤5,否则返回步骤2;步骤5,利用计算的最终驱动力矩驱动电动车辆;然后返回步骤2。在对多轮独立驱动电动车转向时的关键参数的控制基础上,本发明兼顾了车轮滑转状态管理,实现了车

各轮独立转向及驱动的电动汽车及其转向与驱动控制方法.pdf
一种各轮独立转向及驱动的电动汽车及其转向与驱动方法,该电动汽车包括车身、悬架系统、车轮转向系统、若干个车轮总成及驱动控制系统。车轮转向系统包括转向操纵装置、转向控制子系统及数量与车轮总成相同且通过悬架系统装于车身上的转向机构,悬架系统外侧及前后两端留有避位空间,各转向机构包括主销杆及车轮轴,转向控制子系统包括转向控制器、设于主销杆顶端且与主销杆传动连接的转向舵机及转向传感器;各车轮总成包括装于车轮轴上的车轮及轮毂电机;驱动控制系统包括车速控制踏板及控制轮毂电机的驱动控制器。本发明在各车轮处均装有转向舵机及

一种四轮独立驱动电动车辆的主动转向控制方法.pdf
本发明公开一种四轮独立驱动电动车辆的主动转向控制方法,包括以下步骤:预设理想车辆转向模型、状态反馈观测器、前轮转向角控制器和横摆力矩控制器;以车辆直行状态作为初始时刻,实时测量横向速度和横摆角速度,将未知前轮转向角和横摆力矩输入理想车辆转向模型,构造期望的数学模型,将横向速度和横摆角速度期望值与实时值比较,得到实时误差;将实时误差输入到状态观测器,得到稳定闭环系统,通过解线性矩阵不等式方法,既得到实时车辆横向速度和横摆角速度值,也得到实时前轮转向角和横摆力矩值,从而对车辆进行控制。该方法克服了电动车稳定性

四轮独立驱动与转向电动汽车的四轮转向控制方法.pdf
本发明公开四轮独立驱动与转向电动汽车的四轮转向控制方法,包括步骤1:当车辆转弯速度v≤40km/h时,控制器识别驾驶员特性,并且根据所述驾驶员特性并基于BP神经网络对参考横摆角速度进行调控;当车辆转弯速度v>40km/h时,控制器根据二自由度调控模型控制输出参考横摆角速度;步骤2:控制器根据车辆实际横摆角速度和所述参考横摆角速度的差值向角度分配器输出附加转角,所述角度分配器将所述附加转角分配到四个车轮上。本发明所述的四轮独立驱动与转向电动汽车的四轮转向控制方法,根据驾驶员特性和车辆实时行驶状态,在车辆转弯
四轮轮毂电机驱动电动汽车横摆稳定性控制方法.pdf
一种四轮轮毂电机驱动电动汽车横摆稳定性控制方法,属于控制技术领域。本发明的目的是通过对期望的质心侧偏角和期望的横摆角速度进行跟踪,使汽车获得更好稳定性的四轮轮毂电机驱动电动汽车横摆稳定性控制方法。本发明通过二自由度参考模型得到了车辆理想运动状态下质心侧偏角和横摆角速度的参考值,设计横摆力矩优化模型预测控制器,将最优的附加横摆力矩转化为四个轮毂电机附加转矩完成分配。本发明设计的横摆稳定性控制器能有效对质心侧偏角和横摆角速度的参考值进行跟踪,并且考虑了极限工况下轮胎侧向力饱和的因素,使得预测模型更为精准,同时